Anda mungkin juga menyukai
- Traffic EngineeringDokumen13 halamanTraffic Engineeringrmrv valdezBelum ada peringkat
- B15T-7 SB1188 E02Dokumen598 halamanB15T-7 SB1188 E02GORDBelum ada peringkat
- Cie ExamDokumen9 halamanCie ExamAmar Al ChaabanBelum ada peringkat
- Chapter 6 Principals of Traffic FlowDokumen27 halamanChapter 6 Principals of Traffic FlowXhemil HaliliBelum ada peringkat
- Data-Driven Traffic Engineering: Understanding of Traffic and Applications Based on Three-Phase Traffic TheoryDari EverandData-Driven Traffic Engineering: Understanding of Traffic and Applications Based on Three-Phase Traffic TheoryBelum ada peringkat
- VHF FM8500 Operator's Manual K2 9-12-05 PDFDokumen99 halamanVHF FM8500 Operator's Manual K2 9-12-05 PDFsrinu1984100% (1)
- Intro To Traffic Engineering and ManagementDokumen22 halamanIntro To Traffic Engineering and ManagementjulesjusayanBelum ada peringkat
- Traffic Progression ModelsDokumen19 halamanTraffic Progression ModelsZazliana Izatti100% (1)
- Marketing Survey and Channel ProjectDokumen69 halamanMarketing Survey and Channel ProjectRoyal ProjectsBelum ada peringkat
- FLNGDokumen8 halamanFLNGmoiseianBelum ada peringkat
- Traffic Flow and Analysis of RoadsDokumen14 halamanTraffic Flow and Analysis of RoadsJayson J. Pagal100% (1)
- Corporate PresentationDokumen172 halamanCorporate PresentationDrJayant SangoleBelum ada peringkat
- Traffic Flow Theory EditedDokumen10 halamanTraffic Flow Theory EditedreyjBelum ada peringkat
- Liebherr - LR 1350-1Dokumen2 halamanLiebherr - LR 1350-1Ingeniero EstructuralBelum ada peringkat
- Traffic Signal DesignDokumen36 halamanTraffic Signal DesignYasar AthifBelum ada peringkat
- Land Use and Land Use Management SystemDokumen20 halamanLand Use and Land Use Management SystemMuhd FaridBelum ada peringkat
- Cable Suspended Roof-23!10!09Dokumen76 halamanCable Suspended Roof-23!10!09Sonal Sharma75% (4)
- Traffic Flow - WikipediaDokumen146 halamanTraffic Flow - WikipediaAngeline AgunatBelum ada peringkat
- Determination of Capacity at All-Way Stop-Controlled (AWSC) IntersectionsDokumen23 halamanDetermination of Capacity at All-Way Stop-Controlled (AWSC) IntersectionsLê Đức LongBelum ada peringkat
- Traffic Flow Theory: (Jan Valentin)Dokumen17 halamanTraffic Flow Theory: (Jan Valentin)Nenad MilutinovicBelum ada peringkat
- Evaluation of Impacts of Adaptive Cruise Control On Mixed Traffic FlowDokumen8 halamanEvaluation of Impacts of Adaptive Cruise Control On Mixed Traffic FlowGrandis AdiatmaBelum ada peringkat
- Fundamental Principles Of: Traffic FlowDokumen10 halamanFundamental Principles Of: Traffic FlowJericho CastilloBelum ada peringkat
- Effect of Road Width and Traf Fic Volume On Vehicular Interactions in Heterogeneous Traf FicDokumen14 halamanEffect of Road Width and Traf Fic Volume On Vehicular Interactions in Heterogeneous Traf FicRajaSekhararayudu SanaBelum ada peringkat
- Fundamental Principles of Traffic Flow: Dr. Taleb Al-RousanDokumen24 halamanFundamental Principles of Traffic Flow: Dr. Taleb Al-RousandarcinaBelum ada peringkat
- A Cellular Automaton Model of Public Transport System Based On Cruise ControlDokumen6 halamanA Cellular Automaton Model of Public Transport System Based On Cruise ControlNabiel Putra AdamBelum ada peringkat
- Fundamental Principles of Traffic Flow Traffic Flow TheoryDokumen4 halamanFundamental Principles of Traffic Flow Traffic Flow TheoryGerly Joy MaquilingBelum ada peringkat
- Physica A: Damian N. Dailisan, May T. LimDokumen11 halamanPhysica A: Damian N. Dailisan, May T. LimlaeeeqBelum ada peringkat
- Vehicular Congestion DetectionDokumen13 halamanVehicular Congestion DetectionVenkitachalam ParameswaranBelum ada peringkat
- Effect of Vehicle Composition and Delay On Roundabout Capacity Under Mixed Traffic ConditionsDokumen8 halamanEffect of Vehicle Composition and Delay On Roundabout Capacity Under Mixed Traffic ConditionsasdBelum ada peringkat
- Car Following ModelsDokumen44 halamanCar Following ModelsamikhushBelum ada peringkat
- Traffic Analysis Technique (Traffic Flow Theory)Dokumen15 halamanTraffic Analysis Technique (Traffic Flow Theory)Crystal May Oqueriza100% (1)
- Different Control Algorithms For A Platoon of Autonomous VehiclesDokumen10 halamanDifferent Control Algorithms For A Platoon of Autonomous VehiclesAlex VladBelum ada peringkat
- A Theory of Traffic Flow in Automated Highway Systems'Dokumen30 halamanA Theory of Traffic Flow in Automated Highway Systems'Daji YuanBelum ada peringkat
- ITS and Traffic Management: M. PapageorgiouDokumen60 halamanITS and Traffic Management: M. PapageorgiouShubham ShekharBelum ada peringkat
- Highway Traffic Flow Analysis and Control: Dominique DuncanDokumen9 halamanHighway Traffic Flow Analysis and Control: Dominique DuncanYatharth GovilBelum ada peringkat
- CVE 06 Highway and Railroad Engg 12 Fundamental Principles of Traffic FlowDokumen12 halamanCVE 06 Highway and Railroad Engg 12 Fundamental Principles of Traffic Flowluces.johnlloyd05Belum ada peringkat
- Transportation Research Interdisciplinary Perspectives: Taqwa Alhadidi Hesham A. RakhaDokumen11 halamanTransportation Research Interdisciplinary Perspectives: Taqwa Alhadidi Hesham A. RakhaSNKBelum ada peringkat
- Term Paper 1 NotesDokumen172 halamanTerm Paper 1 NotesRaghavendra SanganaikarBelum ada peringkat
- Sciencedirect: Traffic Analysis of Srinagar CityDokumen13 halamanSciencedirect: Traffic Analysis of Srinagar CityAzhArRafIqBelum ada peringkat
- Types of Traffic Flow: Speed (V)Dokumen9 halamanTypes of Traffic Flow: Speed (V)Refisa JiruBelum ada peringkat
- Design of Operations of Personal Rapid T PDFDokumen6 halamanDesign of Operations of Personal Rapid T PDFShreyali AgarwalBelum ada peringkat
- Analysis of Shock Waves and Speed Peak Propagations in Car-Following Conditions From Start To Stop Within Short DistancesDokumen16 halamanAnalysis of Shock Waves and Speed Peak Propagations in Car-Following Conditions From Start To Stop Within Short DistancesSalmanBelum ada peringkat
- Passenger Car Equivalents For Vehicles at Signalized Intersections Within The Kumasi Metropolis in GhanaDokumen6 halamanPassenger Car Equivalents For Vehicles at Signalized Intersections Within The Kumasi Metropolis in GhanaIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalBelum ada peringkat
- Calibrating HCM Model For Roundabout Entry CapacityDokumen13 halamanCalibrating HCM Model For Roundabout Entry CapacityasdBelum ada peringkat
- Parameter Identification of Vehicles Movingon Continuous BridgesDokumen21 halamanParameter Identification of Vehicles Movingon Continuous BridgesAugusto César Santos PeixotoBelum ada peringkat
- Estimation of Saturation Flow and PCU at Intersection With Platoon Dispersion ModelDokumen7 halamanEstimation of Saturation Flow and PCU at Intersection With Platoon Dispersion ModelIJSTEBelum ada peringkat
- A-Revised-Method-For-The-Determination-Of-Passenger Car Equvalent - 1980 - Transportation-Research-PDokumen6 halamanA-Revised-Method-For-The-Determination-Of-Passenger Car Equvalent - 1980 - Transportation-Research-Pfood diariesssBelum ada peringkat
- Ijetae 0614 14Dokumen6 halamanIjetae 0614 14abkhaledBelum ada peringkat
- Traffic Flow: Fundamental PrinciplesDokumen3 halamanTraffic Flow: Fundamental PrincipleshahaBelum ada peringkat
- NourbakhshDokumen13 halamanNourbakhshKerimcanBelum ada peringkat
- CVLE 463: Transportation Planning & Traffic Engineering: Fall 2021/202Dokumen39 halamanCVLE 463: Transportation Planning & Traffic Engineering: Fall 2021/202Amira HachemBelum ada peringkat
- Capacity and Level of ServiceDokumen5 halamanCapacity and Level of ServiceArstuBelum ada peringkat
- Questions - TrasportationDokumen13 halamanQuestions - TrasportationAbhijeet GholapBelum ada peringkat
- Model Split QueDokumen15 halamanModel Split QueAbhijeet GholapBelum ada peringkat
- Jot1011 PDFDokumen94 halamanJot1011 PDFHarry NovfriandiBelum ada peringkat
- Capacity of U-Turn Junction at Midblock Median Opening On Urban Arterial Based On Balancing Volume-To-Capacity RatioDokumen17 halamanCapacity of U-Turn Junction at Midblock Median Opening On Urban Arterial Based On Balancing Volume-To-Capacity Ratioanon_532474481Belum ada peringkat
- Automated Highway Systems An Intelligent Transportation System For The Next Century'Dokumen4 halamanAutomated Highway Systems An Intelligent Transportation System For The Next Century'mujeebBelum ada peringkat
- Escholarship UC Item 4dw0j3hwDokumen28 halamanEscholarship UC Item 4dw0j3hwOsman OmerBelum ada peringkat
- Chapter 3Dokumen51 halamanChapter 3kedirBelum ada peringkat
- Capacity of RoadsDokumen14 halamanCapacity of Roadsjohn van RijnBelum ada peringkat
- Traffic Analysis Technique (Traffic Flow Theory)Dokumen16 halamanTraffic Analysis Technique (Traffic Flow Theory)Crystal May OquerizaBelum ada peringkat
- Module-91A: Traffic Engineering: Traffic Characteristics, Theory of Traffic FlowDokumen6 halamanModule-91A: Traffic Engineering: Traffic Characteristics, Theory of Traffic FlowAjay MalikBelum ada peringkat
- Elements of Traffic FlowDokumen13 halamanElements of Traffic Flowdadziederrick06Belum ada peringkat
- Analysis of Transportation Network Capacity Related To Different System Capacity ConceptsDokumen16 halamanAnalysis of Transportation Network Capacity Related To Different System Capacity Conceptsmucky_desolverBelum ada peringkat
- Use of Vehicle Signature Analysis and Lexicographic Optimization For Vehicle Reidenti®cation On FreewaysDokumen19 halamanUse of Vehicle Signature Analysis and Lexicographic Optimization For Vehicle Reidenti®cation On FreewaysIndra PanggaloBelum ada peringkat
- 12 - WP3-RICAM-2016-Chapter FinalDokumen39 halaman12 - WP3-RICAM-2016-Chapter Finalfood diariesssBelum ada peringkat
- Chapter 1 New - B (TRAFFIC ENGINEERING BFC 32302)Dokumen28 halamanChapter 1 New - B (TRAFFIC ENGINEERING BFC 32302)Mahmuddin AminBelum ada peringkat
- Neues verkehrswissenschaftliches Journal - Ausgabe 16: Capacity Research in Urban Rail-Bound Transportation with Special Consideration of Mixed TrafficDari EverandNeues verkehrswissenschaftliches Journal - Ausgabe 16: Capacity Research in Urban Rail-Bound Transportation with Special Consideration of Mixed TrafficBelum ada peringkat
- Calib-Valid Mega PresentationDokumen98 halamanCalib-Valid Mega PresentationDrJayant SangoleBelum ada peringkat
- Sustainability 13 08838Dokumen23 halamanSustainability 13 08838DrJayant SangoleBelum ada peringkat
- Sioux Falls Test Network: Prepared by Hai Yang and Meng Qiang, Hong Kong University of Science and TechnologyDokumen2 halamanSioux Falls Test Network: Prepared by Hai Yang and Meng Qiang, Hong Kong University of Science and TechnologyDrJayant SangoleBelum ada peringkat
- Achieving The Vision: From Vii To Intellidrive: Intelligent Transportation Systems (Its)Dokumen24 halamanAchieving The Vision: From Vii To Intellidrive: Intelligent Transportation Systems (Its)DrJayant SangoleBelum ada peringkat
- Is and IRC Code at JUITDokumen7 halamanIs and IRC Code at JUITSachin SithikBelum ada peringkat
- Capacity of Unsignalized Urban Junctions: Cracow University of Technology, Cracow, PolandDokumen12 halamanCapacity of Unsignalized Urban Junctions: Cracow University of Technology, Cracow, PolandDrJayant SangoleBelum ada peringkat
- Specification of Membership Functions and Multi-Dimensional Fuzzy SetsDokumen4 halamanSpecification of Membership Functions and Multi-Dimensional Fuzzy SetsDrJayant SangoleBelum ada peringkat
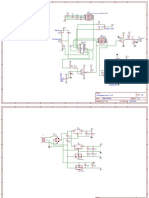
- Schematic Function Gen Part 1Dokumen2 halamanSchematic Function Gen Part 1pecceriniBelum ada peringkat
- Aaj 130 Mar 1960Dokumen47 halamanAaj 130 Mar 1960Alain PiquetBelum ada peringkat
- Score Sheet For PMGSYDokumen4 halamanScore Sheet For PMGSYMonjit Gogoi0% (1)
- 120 SXJ Operation - 3121809 - 05-30-02 - CE - EnglishDokumen80 halaman120 SXJ Operation - 3121809 - 05-30-02 - CE - EnglishrajBelum ada peringkat
- W211 E 500 Oil ChangeDokumen3 halamanW211 E 500 Oil Changeniladam2002Belum ada peringkat
- SEN301previousexamquestions PDFDokumen22 halamanSEN301previousexamquestions PDFM MohanBelum ada peringkat
- DHL Mainline AwbDokumen5 halamanDHL Mainline AwbVictor Lo Dastek UnichipBelum ada peringkat
- Lowzero GeneratorDokumen6 halamanLowzero Generatorimadrid3842Belum ada peringkat
- Construction of Multistorey BuildingDokumen45 halamanConstruction of Multistorey BuildingSugam SehgalBelum ada peringkat
- Grammar 1Dokumen26 halamanGrammar 1ThucNguyenNgoc100% (1)
- 4.1 Pavel SimonDokumen6 halaman4.1 Pavel SimonInês FerrazBelum ada peringkat
- 2007 Ashrae Handbook Parking Garages - p1 3Dokumen3 halaman2007 Ashrae Handbook Parking Garages - p1 3Sergio Motta GarciaBelum ada peringkat
- Afghanistan Constructionpres PDFDokumen10 halamanAfghanistan Constructionpres PDFAsif Iqbal DawarBelum ada peringkat
- Belete & Dereje Internship ReportDokumen23 halamanBelete & Dereje Internship ReportIbrahimMustefa100% (3)
- Ullage in AirDokumen52 halamanUllage in AirA. GHUZZIBelum ada peringkat
- 2016 LBLHillman Ferry Campground MapDokumen2 halaman2016 LBLHillman Ferry Campground MapasudebateBelum ada peringkat
- South Eastern Railways TimetableDokumen33 halamanSouth Eastern Railways TimetableSuman Dey50% (2)
- Medical Application of BLDCDokumen5 halamanMedical Application of BLDCAbd Al HAmidBelum ada peringkat
- Methoed Statetment RevisedDokumen71 halamanMethoed Statetment Revised'Tharindu Harshitha'Belum ada peringkat
- Local Govt Act 2013 KPKDokumen110 halamanLocal Govt Act 2013 KPKAyaanKhan0% (1)
- Skid ControlDokumen16 halamanSkid Controlsangeethsreeni100% (3)
- RESPOD To A DISTRESS SIGNAL at SEA-1Dokumen4 halamanRESPOD To A DISTRESS SIGNAL at SEA-1octavian ekaBelum ada peringkat
- Safety Letter IIDokumen38 halamanSafety Letter IIDr. Aleksandar SimicBelum ada peringkat