Anda mungkin juga menyukai
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5795)
- Distance and Earth Fault Protection PDFDokumen63 halamanDistance and Earth Fault Protection PDFJose Alberto RodriguezBelum ada peringkat
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- Adv Trans NuclearDokumen33 halamanAdv Trans NuclearJose Alberto RodriguezBelum ada peringkat
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- 19 - Distance Device ParameterizationDokumen28 halaman19 - Distance Device ParameterizationJose Alberto RodriguezBelum ada peringkat
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- Fault LocationDokumen162 halamanFault LocationJose Alberto RodriguezBelum ada peringkat
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- GCC Cigre05 Paper Iec61850finDokumen8 halamanGCC Cigre05 Paper Iec61850finJose Alberto RodriguezBelum ada peringkat
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- Astm D 1816-04Dokumen5 halamanAstm D 1816-04Jonathan LayedraBelum ada peringkat
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (400)
- Protective Relay SettingsDokumen2 halamanProtective Relay SettingsShashiraj ShettigarBelum ada peringkat
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- 19 1 7UT6 Family enDokumen13 halaman19 1 7UT6 Family eneng_zidBelum ada peringkat
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (74)
- SIEMENS - Symmetrical ComponentsDokumen12 halamanSIEMENS - Symmetrical ComponentsJose Alberto Rodriguez100% (1)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (345)
- SIEMENS - Distance Protection Power SwingDokumen12 halamanSIEMENS - Distance Protection Power SwingJose Alberto RodriguezBelum ada peringkat
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- Circuitos Trifasicos. Problemas ResueltosDokumen147 halamanCircuitos Trifasicos. Problemas ResueltosJose Alberto RodriguezBelum ada peringkat
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Distribution System Grounding FundamentalsDokumen17 halamanDistribution System Grounding FundamentalsJose Alberto RodriguezBelum ada peringkat
- FfoDokumen2 halamanFfomahendraroxxBelum ada peringkat
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- 0620 w16 QP 21Dokumen20 halaman0620 w16 QP 21Jia RuBelum ada peringkat
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- Mechanical Waves PDFDokumen28 halamanMechanical Waves PDFPhysics loveBelum ada peringkat
- Course Plan: Department of MathematicsDokumen21 halamanCourse Plan: Department of Mathematicsazas asdBelum ada peringkat
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
- Conservation of Momentum ExperimentDokumen1 halamanConservation of Momentum ExperimentibuBelum ada peringkat
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1091)
- Some Basic Concept of Chemistry - DPP 01 (Of Lec-02) - Arjuna NEET 2024Dokumen3 halamanSome Basic Concept of Chemistry - DPP 01 (Of Lec-02) - Arjuna NEET 2024Wind Follower MusicBelum ada peringkat
- Alcohols, Phenols and EthersDokumen11 halamanAlcohols, Phenols and EthersSandeepBelum ada peringkat
- Leader Achiever Course Phase MLP Mazv Mazx Mazy Mazk Mapa Mapb Msp1 Msp2 Lakshyamajor 15448524 Test PDF ZzljhqvsgsDokumen28 halamanLeader Achiever Course Phase MLP Mazv Mazx Mazy Mazk Mapa Mapb Msp1 Msp2 Lakshyamajor 15448524 Test PDF ZzljhqvsgsDr. Poovarasan MBBSBelum ada peringkat
- Compressibility of SoilDokumen94 halamanCompressibility of SoilgeminexBelum ada peringkat
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- General Chemistry ReviewerDokumen1 halamanGeneral Chemistry ReviewerFatima CellonaBelum ada peringkat
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- First-Principles Study of Magnetic Properties in V-Doped ZnoDokumen3 halamanFirst-Principles Study of Magnetic Properties in V-Doped Znotwetykasper100% (2)
- Machine Transformations: J. MccalleyDokumen24 halamanMachine Transformations: J. MccalleyMohamed Al-OdatBelum ada peringkat
- MAT455 - July 2022Dokumen5 halamanMAT455 - July 2022Farhan IkhwanBelum ada peringkat
- BacklashDokumen6 halamanBacklashvishnuBelum ada peringkat
- Experiment 6: Fluid Friction Apparatus This Is A Sample Report, It Is The Perfect FormatDokumen15 halamanExperiment 6: Fluid Friction Apparatus This Is A Sample Report, It Is The Perfect FormatBryan Pashian ManaluBelum ada peringkat
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (121)
- Optics For Engineers: Charles A. Dimarzio Northeastern UniversityDokumen38 halamanOptics For Engineers: Charles A. Dimarzio Northeastern Universitybitconcepts9781Belum ada peringkat
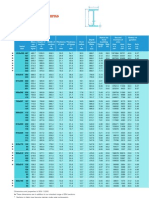
- UKB's and All Other Advance Sections PDFDokumen24 halamanUKB's and All Other Advance Sections PDFJason LeonardBelum ada peringkat
- Complexometric Titration With EDTADokumen8 halamanComplexometric Titration With EDTAManP13100% (1)
- Investigative JournalismDokumen302 halamanInvestigative Journalismapi-304729116Belum ada peringkat
- Ultrasonic Machining Engineering Materials And Manufacuring Technology اشع ديعس نزام ديعس 0147566Dokumen8 halamanUltrasonic Machining Engineering Materials And Manufacuring Technology اشع ديعس نزام ديعس 0147566Saeed AshaBelum ada peringkat
- Study of Acaricide Stability in Honey. Characterization of Amitraz Degradation Products in Honey and BeeswaxDokumen8 halamanStudy of Acaricide Stability in Honey. Characterization of Amitraz Degradation Products in Honey and BeeswaxΚοσμας ΒασιλειαδηςBelum ada peringkat
- Chemical Reaction Chapter 4Dokumen37 halamanChemical Reaction Chapter 4Portia A. EgkenBelum ada peringkat
- Application Guide StroomtransformatorenDokumen127 halamanApplication Guide StroomtransformatorenJemal MusaBelum ada peringkat
- CSTR Lab ReportDokumen10 halamanCSTR Lab ReportErraFatihaBelum ada peringkat
- CR 7 e & MDokumen12 halamanCR 7 e & Msalman suhailBelum ada peringkat
- Structural Evaluation of FSO Ground Build Load-OutDokumen8 halamanStructural Evaluation of FSO Ground Build Load-OutRay LeeBelum ada peringkat
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- Electromagnetic Induction-AssignmentDokumen33 halamanElectromagnetic Induction-Assignmentram ji100% (2)
- Quantum Mechanics 01Dokumen50 halamanQuantum Mechanics 01Venugopal ARBelum ada peringkat
- Journal of Rock Mechanics and Geotechnical Engineering: Saurabh Rawat, Ashok Kumar GuptaDokumen11 halamanJournal of Rock Mechanics and Geotechnical Engineering: Saurabh Rawat, Ashok Kumar GuptaHari RamBelum ada peringkat
- Rotational Dynamics and Static EquilibriumDokumen11 halamanRotational Dynamics and Static EquilibriumnoriBelum ada peringkat