Anda mungkin juga menyukai
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
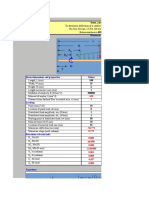
- Steel Cals SimpleDokumen53 halamanSteel Cals SimpleVashish RamrechaBelum ada peringkat
- 2017 1 Art 06 PDFDokumen12 halaman2017 1 Art 06 PDFG V LakshmiBelum ada peringkat
- Equipment ListDokumen10 halamanEquipment ListVashish RamrechaBelum ada peringkat
- Piping FormulaeDokumen9 halamanPiping FormulaeVashish RamrechaBelum ada peringkat
- Beam CantileverDokumen16 halamanBeam CantileverAdam SlametBelum ada peringkat
- Max Allowable Pressure of Pipes and Pipellines CER 04022013 1 (V. S. Kumar Unprotected)Dokumen106 halamanMax Allowable Pressure of Pipes and Pipellines CER 04022013 1 (V. S. Kumar Unprotected)Vashish Ramrecha100% (1)
- Gantt ChartDokumen6 halamanGantt ChartVashish RamrechaBelum ada peringkat
- ISA SymbolsDokumen1 halamanISA SymbolsmustafasandikciBelum ada peringkat
- DC CD Enteric Line List TemplateDokumen1 halamanDC CD Enteric Line List TemplateVashish RamrechaBelum ada peringkat
- DC CD Enteric Line List TemplateDokumen1 halamanDC CD Enteric Line List TemplateVashish RamrechaBelum ada peringkat
- SLS in Manufacturing Sector-7thProofDokumen90 halamanSLS in Manufacturing Sector-7thProofVashish RamrechaBelum ada peringkat
- Steel Beam BS 5950Dokumen17 halamanSteel Beam BS 5950Vashish RamrechaBelum ada peringkat
- In-Text: (Nickerson and Buist, 2008) Bibliography: Nickerson, D. and Buist, M. (2008) - Practical Application of Cellml 1.1: The IntegrationDokumen1 halamanIn-Text: (Nickerson and Buist, 2008) Bibliography: Nickerson, D. and Buist, M. (2008) - Practical Application of Cellml 1.1: The IntegrationVashish RamrechaBelum ada peringkat
- 3 - Tips For Professional Engineer Interview in MalaysiaDokumen19 halaman3 - Tips For Professional Engineer Interview in Malaysiazahrul azha100% (8)
- Steel Cals SimpleDokumen53 halamanSteel Cals SimpleVashish RamrechaBelum ada peringkat
- Gantt ChartDokumen6 halamanGantt ChartVashish RamrechaBelum ada peringkat
- 3.0 Strike Receivers AssessmentDokumen5 halaman3.0 Strike Receivers AssessmentVashish RamrechaBelum ada peringkat
- Why Isometric Drawings Are RequiredDokumen30 halamanWhy Isometric Drawings Are RequiredVashish RamrechaBelum ada peringkat
- Roll 2015Dokumen26 halamanRoll 2015Vashish RamrechaBelum ada peringkat
- Training Record Book 2011 PDFDokumen25 halamanTraining Record Book 2011 PDFsarwarrosunBelum ada peringkat
- Technical Report SynopsisDokumen3 halamanTechnical Report SynopsisAzharuddin_kfupmBelum ada peringkat
- Guidelines For Registration As A Professional Engineer - Peb SingaporeDokumen9 halamanGuidelines For Registration As A Professional Engineer - Peb SingaporejeffreymacaseroBelum ada peringkat
- Pump Handbook by GrundfossDokumen156 halamanPump Handbook by GrundfossSyam Tawakkal100% (1)
- Edited FixturesDokumen67 halamanEdited FixturesVashish RamrechaBelum ada peringkat
- Legacy ECSA ProfEng Appform TERDokumen1 halamanLegacy ECSA ProfEng Appform TERVashish RamrechaBelum ada peringkat
- Legacy ECSA ProfEng Appform TESDokumen1 halamanLegacy ECSA ProfEng Appform TESVashish RamrechaBelum ada peringkat
- The Gurney Flap: A Case Study: 1.1 Issues in Wing DesignDokumen9 halamanThe Gurney Flap: A Case Study: 1.1 Issues in Wing DesignVashish RamrechaBelum ada peringkat
- DSG MechDokumen8 halamanDSG MechVashish RamrechaBelum ada peringkat
- CH-4 Shells Under External PressureDokumen64 halamanCH-4 Shells Under External PressureVashish RamrechaBelum ada peringkat
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (399)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (73)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (120)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- MLAB 3 - BoilerDokumen3 halamanMLAB 3 - BoilerReden LopezBelum ada peringkat
- Entropy Equation For A Control VolumeDokumen12 halamanEntropy Equation For A Control VolumenirattisaikulBelum ada peringkat
- Cambridge International AS & A Level: Biology 9700/21Dokumen18 halamanCambridge International AS & A Level: Biology 9700/21Lavanya EaswarBelum ada peringkat
- Barriers of CommunicationDokumen5 halamanBarriers of CommunicationIVY YBAÑEZBelum ada peringkat
- Theories of PersonalityDokumen4 halamanTheories of PersonalityKeshav JhaBelum ada peringkat
- Of Personality Traits of Only and Sibling School Children in BeijingDokumen14 halamanOf Personality Traits of Only and Sibling School Children in BeijingMuhammad Hamza AsgharBelum ada peringkat
- NC Error PropagationDokumen12 halamanNC Error PropagationSalman KhanBelum ada peringkat
- Framework For A Digital Twin in Manufacturing Scope and RequirementsDokumen3 halamanFramework For A Digital Twin in Manufacturing Scope and RequirementsJoão Vitor100% (1)
- FMS 427 BusinessPolicy1Dokumen279 halamanFMS 427 BusinessPolicy1Adeniyi Adedolapo OLanrewajuBelum ada peringkat
- The First-Fourth Books of The HitopadésaDokumen116 halamanThe First-Fourth Books of The HitopadésaMiguel RosaBelum ada peringkat
- Chapter 01 Fundamental and Derived QuantitiesDokumen7 halamanChapter 01 Fundamental and Derived QuantitiesAlicia WilliamsBelum ada peringkat
- Rivers and Their Origin (Top MCQ)Dokumen24 halamanRivers and Their Origin (Top MCQ)Anil Yadav100% (1)
- Pearson Letter To ParentsDokumen2 halamanPearson Letter To ParentsPatricia WillensBelum ada peringkat
- Solved Consider Again The Demand Function For Corn in Formula 1Dokumen1 halamanSolved Consider Again The Demand Function For Corn in Formula 1M Bilal SaleemBelum ada peringkat
- MHSS ItalyDokumen9 halamanMHSS Italyromedic36Belum ada peringkat
- P&G Interview QuestionsDokumen2 halamanP&G Interview Questionssupu100% (3)
- ENGLISH TOEFL Structure (3rd Exercise)Dokumen5 halamanENGLISH TOEFL Structure (3rd Exercise)susannnnnnBelum ada peringkat
- Exposure: The PhotoreactionDokumen16 halamanExposure: The PhotoreactionGeetha ThiruvengadamBelum ada peringkat
- Digital Signal Processing Lab ManualDokumen61 halamanDigital Signal Processing Lab ManualOmer Sheikh100% (6)
- How The Audiences Feel Closer and Connected To Their Culture With StorytellingDokumen7 halamanHow The Audiences Feel Closer and Connected To Their Culture With Storytellingmarcelo quezadaBelum ada peringkat
- Parkinson S Disease Detection Based On SDokumen5 halamanParkinson S Disease Detection Based On SdaytdeenBelum ada peringkat
- Formal Report Expt 5Dokumen6 halamanFormal Report Expt 5AnonymouscatBelum ada peringkat
- Week 8: Spread-Spectrum Modulation - Direct Sequence Spread SpectrumDokumen79 halamanWeek 8: Spread-Spectrum Modulation - Direct Sequence Spread SpectrumAmir MustakimBelum ada peringkat
- Capital Budgeting and Capital Budgeting and Risk Analysis Risk AnalysisDokumen16 halamanCapital Budgeting and Capital Budgeting and Risk Analysis Risk AnalysisHaris FendiarBelum ada peringkat
- SH5108 - 5 Occupational Health ProgrammeDokumen34 halamanSH5108 - 5 Occupational Health Programmetaaouicha mujahidBelum ada peringkat
- Summative 1Dokumen4 halamanSummative 1Nean YsabelleBelum ada peringkat
- Evs ManualDokumen24 halamanEvs ManualJoseph TuckerBelum ada peringkat
- Silenat Berhanu SimaDokumen6 halamanSilenat Berhanu SimaSilenat BerhanuBelum ada peringkat
- Individual Performance Commitment and Review Form (Ipcrf) : Annex EDokumen8 halamanIndividual Performance Commitment and Review Form (Ipcrf) : Annex Emenzi magnoBelum ada peringkat