Anda mungkin juga menyukai
- FormulaDokumen7 halamanFormulaMàddìRèxxShìrshírBelum ada peringkat
- CS20 Instruction Manual: Inverted Vertical Turning CellDokumen83 halamanCS20 Instruction Manual: Inverted Vertical Turning CellHenryBelum ada peringkat
- Fobasv 6Dokumen3 halamanFobasv 6Satyabrat Gaan100% (3)
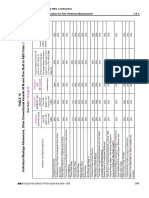
- ABS Thickness Measurement Requirement For Ship in Operation PDFDokumen2 halamanABS Thickness Measurement Requirement For Ship in Operation PDFMohd Fouzi AbdullahBelum ada peringkat
- Formula PQTDokumen13 halamanFormula PQTசிவக்குமார் ஈஸ்வரன்Belum ada peringkat
- An Introduction To Stochastic CalculusDokumen102 halamanAn Introduction To Stochastic Calculusfani100% (1)
- An Introduction To Malliavin Calculus With Applications To EconomicsDokumen83 halamanAn Introduction To Malliavin Calculus With Applications To EconomicsselivesBelum ada peringkat
- Beginners Python Cheat Sheet PCC All PDFDokumen26 halamanBeginners Python Cheat Sheet PCC All PDFName100% (1)
- Acoustic ManualDokumen88 halamanAcoustic ManualAlex Feria100% (1)
- Estimation Theory PresentationDokumen66 halamanEstimation Theory PresentationBengi Mutlu Dülek100% (1)
- Colorado Passenger Tramway Safety Board Adam Lee Accident ReportDokumen28 halamanColorado Passenger Tramway Safety Board Adam Lee Accident ReportMichael_Lee_RobertsBelum ada peringkat
- PC Pump ManualDokumen540 halamanPC Pump ManualtelephonicaBelum ada peringkat
- Lévy Stable Probability Laws, Lévy Flights, Space-Fractional Diffusion and Kinetic Equations (Two Lectures)Dokumen17 halamanLévy Stable Probability Laws, Lévy Flights, Space-Fractional Diffusion and Kinetic Equations (Two Lectures)Dony HidayatBelum ada peringkat
- Risk Analysis For Information and Systems Engineering: INSE 6320 - Week 3Dokumen9 halamanRisk Analysis For Information and Systems Engineering: INSE 6320 - Week 3ALIKNFBelum ada peringkat
- PRP NotesDokumen10 halamanPRP NotesBharath JojoBelum ada peringkat
- Introduction to Real Analysis: Metric Spaces and ConvergenceDokumen81 halamanIntroduction to Real Analysis: Metric Spaces and ConvergenceAsk Bulls BearBelum ada peringkat
- A Very Gentle Note On The Construction of DP ZhangDokumen15 halamanA Very Gentle Note On The Construction of DP ZhangronalduckBelum ada peringkat
- Introduction To Stochastic Processes: Master INVESMAT 2017-2018 Unit 3Dokumen50 halamanIntroduction To Stochastic Processes: Master INVESMAT 2017-2018 Unit 3Ainhoa AzorinBelum ada peringkat
- Fa NotesDokumen85 halamanFa NotesAngelo OppioBelum ada peringkat
- Econometric Toolkit For Studying Dynamic Models in Economics and FinanceDokumen39 halamanEconometric Toolkit For Studying Dynamic Models in Economics and FinancerrrrrrrrBelum ada peringkat
- Prob Stats NotesDokumen10 halamanProb Stats NotesPatrick MugoBelum ada peringkat
- Frequency-Domain Analysis of Discrete-Time Signals and SystemsDokumen31 halamanFrequency-Domain Analysis of Discrete-Time Signals and SystemsSwatiSharmaBelum ada peringkat
- Chapter 2Dokumen25 halamanChapter 2McNemarBelum ada peringkat
- Some Common Probability DistributionsDokumen92 halamanSome Common Probability DistributionsAnonymous KS0gHXBelum ada peringkat
- Markproc 2022 V 6Dokumen77 halamanMarkproc 2022 V 6Manish KumarBelum ada peringkat
- Chap2 Discrete DistributionsDokumen22 halamanChap2 Discrete Distributionsgocipa7145Belum ada peringkat
- Markproc 2022 V 5Dokumen77 halamanMarkproc 2022 V 5Manish KumarBelum ada peringkat
- 5 BMDokumen20 halaman5 BMNaailah نائلة MaudarunBelum ada peringkat
- 1 Mathematical Preliminaries 2Dokumen17 halaman1 Mathematical Preliminaries 2shubhamBelum ada peringkat
- RVSP NotesDokumen123 halamanRVSP NotesSatish Kumar89% (9)
- Random Process Characteristic Equation NOTESDokumen147 halamanRandom Process Characteristic Equation NOTESAjay SinghBelum ada peringkat
- , x, - . -, x f (x, x, - . -, x, x, - . -, x, x, - . -, x, x, - . -, x, x, - . -, x, σ, - . -, σ ∈Dokumen5 halaman, x, - . -, x f (x, x, - . -, x, x, - . -, x, x, - . -, x, x, - . -, x, x, - . -, x, σ, - . -, σ ∈guido360Belum ada peringkat
- Ca07 RgIto TextDokumen18 halamanCa07 RgIto TextTerwal Aandrés Oortiz VargasBelum ada peringkat
- Linearization Stability Definitions Simulation in Matlab/SimulinkDokumen39 halamanLinearization Stability Definitions Simulation in Matlab/SimulinkSachin ShendeBelum ada peringkat
- Compound Poisson Distribution Limit TheoremDokumen6 halamanCompound Poisson Distribution Limit TheoremNamdevBelum ada peringkat
- Chapter 6F-PropCRV - W PDFDokumen30 halamanChapter 6F-PropCRV - W PDFaltwirqiBelum ada peringkat
- Statistical Methods NotesDokumen9 halamanStatistical Methods NotesDennis Uygur AnderssonBelum ada peringkat
- 1.8. Large Deviation and Some Exponential Inequalities.: B R e DX Essinf G (X), T e DX Esssup G (X)Dokumen4 halaman1.8. Large Deviation and Some Exponential Inequalities.: B R e DX Essinf G (X), T e DX Esssup G (X)Naveen Kumar SinghBelum ada peringkat
- The Fokker-Planck Equation ExplainedDokumen12 halamanThe Fokker-Planck Equation ExplainedslamBelum ada peringkat
- PROBABILITY FUNCTIONS ANALYZEDDokumen18 halamanPROBABILITY FUNCTIONS ANALYZEDIkhwan ZulhilmiBelum ada peringkat
- T T 1 T 2 T 3 T TDokumen2 halamanT T 1 T 2 T 3 T TGeorgios GougouliasBelum ada peringkat
- Lecture Notes Week 1Dokumen10 halamanLecture Notes Week 1tarik BenseddikBelum ada peringkat
- Random Processes DefinitionsDokumen2 halamanRandom Processes Definitionsdajedi43017Belum ada peringkat
- H2 Maths Normal DistributionDokumen14 halamanH2 Maths Normal Distributionpiyush raghavBelum ada peringkat
- Applications of Infinite Series ExplainedDokumen26 halamanApplications of Infinite Series ExplainedSoumyajit BhattacharyaBelum ada peringkat
- CLT PDFDokumen4 halamanCLT PDFdBelum ada peringkat
- PRP Anna University QADokumen8 halamanPRP Anna University QANaresh KonduruBelum ada peringkat
- LBSEconometricsPartIIpdf Time SeriesDokumen246 halamanLBSEconometricsPartIIpdf Time SeriesZoloft Zithromax ProzacBelum ada peringkat
- Chap2 PDFDokumen20 halamanChap2 PDFJacobBelum ada peringkat
- Stochastic ProcessesDokumen46 halamanStochastic ProcessesforasepBelum ada peringkat
- Kulkami, V. G. Modeling Analysis Design and Control of Stochastic System (2000) .4Dokumen30 halamanKulkami, V. G. Modeling Analysis Design and Control of Stochastic System (2000) .4Fabiano BorgesBelum ada peringkat
- Non-Life Insurance Mathematics (Sumary)Dokumen99 halamanNon-Life Insurance Mathematics (Sumary)chechoBelum ada peringkat
- ARMA process confidence intervalDokumen2 halamanARMA process confidence intervalGeorgios GougouliasBelum ada peringkat
- Random Process in Analog Communication SystemsDokumen91 halamanRandom Process in Analog Communication SystemsEkaveera Gouribhatla100% (1)
- more exactly, measurable function w.r.t. some σ-algebraDokumen6 halamanmore exactly, measurable function w.r.t. some σ-algebraAhmed Karam EldalyBelum ada peringkat
- QueueingPart1 Rev5 WinDokumen83 halamanQueueingPart1 Rev5 WinBini YamBelum ada peringkat
- Partial Differential Equations Example Sheet 1: BooksDokumen6 halamanPartial Differential Equations Example Sheet 1: BooksNasih AhmadBelum ada peringkat
- Martingales, Stopping Times and Option PricingDokumen12 halamanMartingales, Stopping Times and Option PricingfmayambalaBelum ada peringkat
- Elements of Probability Theory: 2.1 Probability, Random Variables and Random MatricesDokumen7 halamanElements of Probability Theory: 2.1 Probability, Random Variables and Random MatricesGerardOo Alexander SBelum ada peringkat
- Engineering Mathematics III 2015 Solved Question Papers For VTU All Semester 3Dokumen25 halamanEngineering Mathematics III 2015 Solved Question Papers For VTU All Semester 3RajKumarBelum ada peringkat
- Chapt 6Dokumen12 halamanChapt 6NewtoniXBelum ada peringkat
- Stat 463 Estimation 1: Ch. 6.1 - 6.2 Estimation:: N IidDokumen12 halamanStat 463 Estimation 1: Ch. 6.1 - 6.2 Estimation:: N IidjlosamBelum ada peringkat
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)Dari EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)Belum ada peringkat
- Difference Equations in Normed Spaces: Stability and OscillationsDari EverandDifference Equations in Normed Spaces: Stability and OscillationsBelum ada peringkat
- Data Center Professionals InfographicDokumen1 halamanData Center Professionals InfographicCISCO MANBelum ada peringkat
- Juniper Commands v4 Static RoutesDokumen2 halamanJuniper Commands v4 Static RoutesCISCO MANBelum ada peringkat
- 2 SwitchingDokumen1 halaman2 SwitchingSai Kyaw HtikeBelum ada peringkat
- Juniper Commands v4 Static RoutesDokumen2 halamanJuniper Commands v4 Static RoutesCISCO MANBelum ada peringkat
- C++ FinanceDokumen262 halamanC++ FinanceolukaoskyBelum ada peringkat
- Juniper OspfDokumen34 halamanJuniper OspfHanifan You KunBelum ada peringkat
- PDEDokumen58 halamanPDEAditya DsrBelum ada peringkat
- Engineering Data Sheet: 49187073 E 1145842 1 of 1 October 21, 2016 60HzDokumen1 halamanEngineering Data Sheet: 49187073 E 1145842 1 of 1 October 21, 2016 60HzGustavo VillarrealBelum ada peringkat
- System ConfigurationDokumen13 halamanSystem ConfigurationEdlyn Estopa BuenoBelum ada peringkat
- PuleyDokumen9 halamanPuleynicolasBelum ada peringkat
- 03-2ezii (Ex-Lx-Dx) Codde 3 QRH1 V1Dokumen352 halaman03-2ezii (Ex-Lx-Dx) Codde 3 QRH1 V1sadh94Belum ada peringkat
- Notice No.8: Rules and Regulations For TheDokumen40 halamanNotice No.8: Rules and Regulations For TherickBelum ada peringkat
- EMF Test Report: Ericsson Street Macro 6701 B261 (FCC) : Rapport Utfärdad Av Ackrediterat ProvningslaboratoriumDokumen13 halamanEMF Test Report: Ericsson Street Macro 6701 B261 (FCC) : Rapport Utfärdad Av Ackrediterat Provningslaboratoriumiogdfgkldf iodflgdfBelum ada peringkat
- Meshing Methods (ANSYS Meshing) - Everyone Is Number OneDokumen14 halamanMeshing Methods (ANSYS Meshing) - Everyone Is Number Oneicemage1991Belum ada peringkat
- CST Design Studio - WorkflowDokumen102 halamanCST Design Studio - WorkflowHeber Bustos100% (7)
- Xiv 11.5.1 XcliDokumen704 halamanXiv 11.5.1 XcliMuthu LBelum ada peringkat
- Standing Waves Worksheet SolutionsDokumen6 halamanStanding Waves Worksheet SolutionsMaher TrabelsiBelum ada peringkat
- AC 43-9-1 Amdt 0Dokumen15 halamanAC 43-9-1 Amdt 0Harry NuryantoBelum ada peringkat
- Remeha Gas 310 ECO: Technical InformationDokumen59 halamanRemeha Gas 310 ECO: Technical InformationAdrian Blazquez MolinaBelum ada peringkat
- Davao October 2014 Criminologist Board Exam Room AssignmentsDokumen113 halamanDavao October 2014 Criminologist Board Exam Room AssignmentsPRC Board0% (1)
- Dunlop Cement Based Adhesives - SDS10024Dokumen4 halamanDunlop Cement Based Adhesives - SDS10024Dominic LeeBelum ada peringkat
- Assessment 1 - Questioning - Written Assessment: Satisfactory or Not YetsatisfactoryDokumen38 halamanAssessment 1 - Questioning - Written Assessment: Satisfactory or Not YetsatisfactoryAbhishek Kumar0% (1)
- Preparatory Year Program Computer Science (PYP 002)Dokumen34 halamanPreparatory Year Program Computer Science (PYP 002)Hassan AlfarisBelum ada peringkat
- Wall Climbing Surveillance Robot ReportDokumen79 halamanWall Climbing Surveillance Robot Reportneha gupta100% (3)
- Irc - 24-2010 PDFDokumen128 halamanIrc - 24-2010 PDFkiranBelum ada peringkat
- Lab Report Building TransportationDokumen8 halamanLab Report Building TransportationshahBelum ada peringkat
- Çimsa Eco White TDS (EN)Dokumen1 halamanÇimsa Eco White TDS (EN)Babu NysemereBelum ada peringkat
- NUVE EN 032-055-120 Incubators BrochureDokumen2 halamanNUVE EN 032-055-120 Incubators BrochureDinhtrung TruongBelum ada peringkat
- PCR200Dokumen4 halamanPCR200Rudy SalimBelum ada peringkat
- Main Engine Cylinder Liner Crack: Return To TOCDokumen2 halamanMain Engine Cylinder Liner Crack: Return To TOCRani NoumanBelum ada peringkat