Anda mungkin juga menyukai
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (265)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (119)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- Mantrac Egypt ProfileDokumen9 halamanMantrac Egypt ProfilenabilredascribdBelum ada peringkat
- Design and Generating Energy As A Car Alternator TDokumen7 halamanDesign and Generating Energy As A Car Alternator TJohnny TestBelum ada peringkat
- Principle Design Solenoid ValvesDokumen28 halamanPrinciple Design Solenoid Valveshassan alrokabBelum ada peringkat
- YM80SA Abrasive Belt Polishing Machine-Operation ManualDokumen7 halamanYM80SA Abrasive Belt Polishing Machine-Operation ManualAgha Ali KhanBelum ada peringkat
- SGMF Hose BunkeringDokumen15 halamanSGMF Hose BunkeringFilipBelum ada peringkat
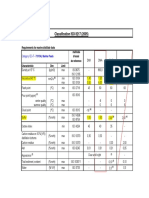
- Classification ISO 8217 (2005)Dokumen5 halamanClassification ISO 8217 (2005)Salah JallaliBelum ada peringkat
- Voltage Source InverterDokumen77 halamanVoltage Source InverterSaied Aly SalamahBelum ada peringkat
- DG Set SelectionDokumen12 halamanDG Set SelectionDr. R. SharmaBelum ada peringkat
- A Novel ZVS-ZCS Bi-Directional Flyback DC-DCDokumen6 halamanA Novel ZVS-ZCS Bi-Directional Flyback DC-DCArceu CamposBelum ada peringkat
- Site Effect Evaluation Using Spectral Ratios With Only One StationDokumen15 halamanSite Effect Evaluation Using Spectral Ratios With Only One StationJavier MtBelum ada peringkat
- KPSC/ KSEB/ SSC Electrical Score Academy: Questions: 75Dokumen9 halamanKPSC/ KSEB/ SSC Electrical Score Academy: Questions: 75sreevasanthBelum ada peringkat
- RECYCLED ASPHALTDokumen27 halamanRECYCLED ASPHALTwillypraviantoBelum ada peringkat
- Current Transformer - Electrical Notes & ArticlesDokumen47 halamanCurrent Transformer - Electrical Notes & Articlesnomy158100% (1)
- Chilled Water Pipe Insulation Method StatementDokumen2 halamanChilled Water Pipe Insulation Method StatementGündoğdu Akın75% (4)
- Mayo College: Dining Hall at AjmerDokumen79 halamanMayo College: Dining Hall at AjmerFaquruddinBelum ada peringkat
- 24th Annual International Pittsburgh Coal 2007 WixDokumen10 halaman24th Annual International Pittsburgh Coal 2007 WixAmauche OgeBelum ada peringkat
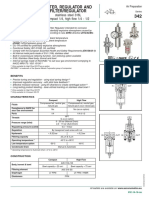
- Numatics Series 342Dokumen6 halamanNumatics Series 342Jebran FarazBelum ada peringkat
- Three-Phase Induction MotorDokumen21 halamanThree-Phase Induction MotorRajeev ValunjkarBelum ada peringkat
- Atmospheric Water Generator DesignDokumen9 halamanAtmospheric Water Generator Designscribd2Belum ada peringkat
- Edited Economics AsDokumen476 halamanEdited Economics AsShakeela ShanmuganathanBelum ada peringkat
- Ethics IndividualDokumen3 halamanEthics IndividualJustin JJBelum ada peringkat
- Case 1088 Repair Manual (Crawler Excavator) PDFDokumen971 halamanCase 1088 Repair Manual (Crawler Excavator) PDFrida100% (7)
- KRYPTOSPHERE TechnologyDokumen20 halamanKRYPTOSPHERE TechnologySoniale Sánchez GómezBelum ada peringkat
- Photovoltaic Silicon Wafer - SUMCO CORPORATIONDokumen21 halamanPhotovoltaic Silicon Wafer - SUMCO CORPORATIONlawrence_yuen_3Belum ada peringkat
- Total Rewinding and Reconditioning of 3KW MotorDokumen5 halamanTotal Rewinding and Reconditioning of 3KW MotorCBD COLLEGE INCBelum ada peringkat
- 4,5. Transformers (1 Phase & 3 Phase)Dokumen48 halaman4,5. Transformers (1 Phase & 3 Phase)nakkasrinuBelum ada peringkat
- DC Machine Theory and Transformer PrinciplesDokumen32 halamanDC Machine Theory and Transformer PrinciplesPolireddi Gopala KrishnaBelum ada peringkat
- Introduction to Concrete Components and ClassificationDokumen29 halamanIntroduction to Concrete Components and ClassificationUsama AliBelum ada peringkat
- Kvpy Pee PDFDokumen9 halamanKvpy Pee PDFstudysteps.inBelum ada peringkat