Anda mungkin juga menyukai
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (120)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (399)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2219)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (73)
- Services Architecture v3.2 Student Guide DownloadDokumen430 halamanServices Architecture v3.2 Student Guide DownloadNathalyBelum ada peringkat
- NetNumen U31 (GU) Product DescriptionDokumen45 halamanNetNumen U31 (GU) Product DescriptionDidier Tanga100% (3)
- Training Course 5g Sa ArchitectureDokumen39 halamanTraining Course 5g Sa ArchitectureHilal LakhbatBelum ada peringkat
- Ceragon FibeAir IP-10G Product DescriptionDokumen403 halamanCeragon FibeAir IP-10G Product DescriptionPetyo GeorgievBelum ada peringkat
- WP Openet 101 Use Cases 2020Dokumen95 halamanWP Openet 101 Use Cases 2020Abhishek PassiBelum ada peringkat
- Multimedia CommunicationsDokumen7 halamanMultimedia Communicationsmrana_56Belum ada peringkat
- Output Drops Due To QoS On Cisco 2960 3560 3750 SwitchesDokumen7 halamanOutput Drops Due To QoS On Cisco 2960 3560 3750 Switchestang410872108Belum ada peringkat
- SAGEM-LINK F-H Iinstallation and Operation ManualDokumen134 halamanSAGEM-LINK F-H Iinstallation and Operation ManualKrisztian MódosBelum ada peringkat
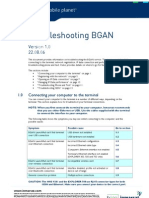
- Troubleshooting BGAN: 1.0 Connecting Your Computer To The TerminalDokumen15 halamanTroubleshooting BGAN: 1.0 Connecting Your Computer To The TerminalRobinson DuwebBelum ada peringkat
- NAM User BookDokumen294 halamanNAM User BookvyarthBelum ada peringkat
- User Guide Cyberoam VXDokumen310 halamanUser Guide Cyberoam VXRahmat MuliadiBelum ada peringkat
- 5G Mobile Technology Seminar ReportDokumen22 halaman5G Mobile Technology Seminar ReportPrarthana A DBelum ada peringkat
- OS6850 AOS 6.4.4.707 R01 Release NotesDokumen130 halamanOS6850 AOS 6.4.4.707 R01 Release NotesdilnuwanBelum ada peringkat
- M - Der - ZXMW Nr8120a Nr8120d (R4.2a) Product Description - v1.01 - 20160330Dokumen86 halamanM - Der - ZXMW Nr8120a Nr8120d (R4.2a) Product Description - v1.01 - 20160330Bekti Agung DTg100% (1)
- Tsunami® QB-10100L Series: High Throughput Point-to-Point Wireless Bridge BundleDokumen2 halamanTsunami® QB-10100L Series: High Throughput Point-to-Point Wireless Bridge BundleOJ G SamBelum ada peringkat
- Managing and Configuring Cisco Voip Devices: Ip Telephony Ip AddressesDokumen31 halamanManaging and Configuring Cisco Voip Devices: Ip Telephony Ip Addressesgeorge729Belum ada peringkat
- Quidway AR 29-21&29-41 Routers System DescriptionDokumen61 halamanQuidway AR 29-21&29-41 Routers System DescriptionHamza_yakan967100% (1)
- Week 4 - Chapter - 4 - v8.2 Part 1Dokumen52 halamanWeek 4 - Chapter - 4 - v8.2 Part 1bubblyleo143Belum ada peringkat
- Advanced Topics In: MPLS-TE DeploymentDokumen33 halamanAdvanced Topics In: MPLS-TE DeploymentbabajuliusBelum ada peringkat
- Cisco IT Case Study: SLX Global Virtual EventsDokumen14 halamanCisco IT Case Study: SLX Global Virtual EventsCisco IT100% (1)
- iCore Softphone VoIP solutionDokumen4 halamaniCore Softphone VoIP solutionjasoncortesBelum ada peringkat
- Meru MC5000 Data SheetDokumen2 halamanMeru MC5000 Data Sheetvs6xra8308Belum ada peringkat
- ATNDokumen104 halamanATNEmir PločoBelum ada peringkat
- A Comparative Study of Non Orthogonal Multiple Access With Existing Orthogonal Multiple Access SchemesDokumen11 halamanA Comparative Study of Non Orthogonal Multiple Access With Existing Orthogonal Multiple Access SchemesRasoolNaniBelum ada peringkat
- CSE 3 & 4yrs - SyllabusDokumen62 halamanCSE 3 & 4yrs - SyllabusAnjali NaiduBelum ada peringkat
- Muhammad Ibrahim-CvDokumen4 halamanMuhammad Ibrahim-CvDr-Muhammad IbrahimBelum ada peringkat
- Chapter 2 CommunicationDokumen59 halamanChapter 2 CommunicationAbby JenningsBelum ada peringkat
- Surpass Hid 6600 Qos v4.0Dokumen27 halamanSurpass Hid 6600 Qos v4.0Văn Tấn ThanhBelum ada peringkat
- Sic MCQDokumen67 halamanSic MCQshin chanBelum ada peringkat
- Distributed Traffic Management Framework by Network Parameters PDFDokumen5 halamanDistributed Traffic Management Framework by Network Parameters PDFijosatBelum ada peringkat