JOURNAL OF COMPUTING, VOLUME 4, ISSUE 4, APRIL 2012, ISSN 2151-9617 https://sites.google.com/site/journalofcomputing WWW.JOURNALOFCOMPUTING.
ORG
72
Layer 3 Fault Recovery Mechanism in MPLS Network-on-Chip
Mohammad Reza Nouri Rad
Department of Computer Engineering Islamic Azad University KhorramAbad Branch, Iran
Reza Kourdy
Department of Computer Engineering Islamic Azad University KhorramAbad Branch, Iran
Abstractin MPLS-NoC data transmission occurs on label switching path (LSPs). LSPs established either before data transmission that called control driven, or on detection of a certain flow of data that called data driven. In this paper we compare the performance of heterogeneous Network on Chip (NoC) architectures in the sense of on chip network design methodology, with Layer 3 packet forwarding. We also carry out the high-level simulation of on chip network using NS-2 to verify the analytical analysis. Keywords- Network-on-Chip, MPLS, Layyer 3 packet forwarding, control driven, data driven.
delivery of packets through a network.[6] Multi-Protocol Label Switching (MPLS) is an alternative to integrate the traditional Internet Protocol (IP) routing and switching technologies because it provides end-to-end Quality of Service (QoS), guarantees Traffic Engineering, and support Virtual Private Networks (VPNs). However, MPLS must use path restoration schemes to guarantee the delivery of packets through a network [7]. MPLS architecture node for Label switching and Layer 3 (L3) packet forwarding shown in Fig. 1.
INTRODUCTION
Systems-on-chip (SoCs) for multimedia or telecommunication applications will contain a large number of processing elements (PEs) such as a DSP processor, RISC CPU, embedded RAM, graphics engine, etc. As a result, there is a need for high-throughput communications links between these blocks. There exist many bus based SoCs which are widely used in industry such as AMBA [1], IBM Core-Connect [2], Pi-Bus [3], etc. During the last years, Networks-on-Chip (NoCs) have become a true alternative for the design of complex integrated Systems-on-Chip (SoC). Much effort has been spent for research on functionalities, mechanisms, and Quality-of-Service (QoS) features in NoCs [4]. We can view an NoC system platform as a very complex and multiprotocol network. As such, providing application-wide, endto-end quality-of-service (QoS) is crucial for optimum system performance. System-wide performance constraints require predictability of inter-block communication and QoS guarantees for the end-to-end communication. QoS is characterized by diverse parameters, such as reliability, delay, jitter, bandwidth, packet loss, and throughput [5]. For this purpose, there are recovery mechanisms for MPLS-based protection label switching path (LSP), which are protection switching and rerouting models. MultiProtocol Label Switching (MPLS) is an alternative to integrate the traditional Internet Protocol (IP) routing and switching technologies because it provides end-to-end Quality of Service (QoS), guarantees Traffic Engineering, and support Virtual Private Networks (VPNs). However, MPLS must use path restoration schemes to guarantee the
Fig. 1. MPLS architecture node for Label switching and Layer 3 (L3) packet forwarding.
BACKGROUND
2.1 Bandwidth Reservation System designers will require NoC communication platforms which have a certain degree of multi-protocol support such as MPLS. Most of the existing NoC architectures are packet-switched (connectionless) NoCs. They are targeting Best-Effort (BE) traffic. Architectures offering only Best-Effort services dont reserve bandwidth and hence can have better average resource utilization, at the cost of unpredictable or unbounded worst-case behavior [8].
JOURNAL OF COMPUTING, VOLUME 4, ISSUE 4, APRIL 2012, ISSN 2151-9617 https://sites.google.com/site/journalofcomputing WWW.JOURNALOFCOMPUTING.ORG
73
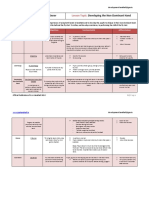
2.2 MPLS and MPLS-TP Components As mentioned previously, MPLS refers to a suite of protocols, and MPLS-TP refers to a set of compatible enhancements to the MPLS protocol suite. These protocols and new enhancements can be separated into the following categories: Network ArchitectureCovers the definition of various functions and the interactions among them. Data Plane covers the protocols and mechanisms that are used to forward the data packets. This can further be divided into the following subcategories: - Framing, forwarding, encapsulation - OAM - Resiliency (protection and restoration) Control Plane covers the protocols and mechanisms used to set up the label-switched paths (LSPs) that are used to forward the data packets. Management Plane covers the protocols and mechanisms that are used to manage the network. A list of protocols and mechanisms in each of these categories is provided in figure 1. The figure also highlights the set of enhancements that are being pursued by MPLS-TP. The protocol and mechanisms highlighted in blue are being added to the MPLS/GMPLS protocol suite as part of the MPLS-TP effort. In fig. 2, the protocols and mechanisms highlighted in red might not be needed for the transport networks and are, therefore, being made optional. Note that these mechanisms will remain as part of the MPLS/GMPLS protocol suite. It is IETfs guidance to vendors that these mechanisms do not need to be supported on the platforms that are being targeted towards transport networks.
quite some time. The static control plane may have applicability in scenarios where some equipment, especially equipment used at the edges of the network, does not support a dynamic control plane, or in which static configuration is preferred for security reasons. The NMS-driven control plane also allows operators to manage the packet-based network in the same way that they have historically been managing the circuit-switched network. Even though the use of dynamic control plane is optional in MPLS-TP, a dynamic control plane has its own advantages, in particular with regards to scaling. It also provides advanced protection functions (for example, schemes such as LSP tail-end protection). Therefore, operators that are comfortable with the dynamic control plane can and are encouraged to use GMPLS and T-LDP to set up the LSPs and the pseudo wires respectively in the context of MPLS-TP [9]. The Functional Plane in MPLS NOC was shown in fig. 3.
Fig. 3. Functional Plane in MPLS NOCs.
RELATED WORK
Network-on-Chip Quality-of-Service through MPLS objective is discussed in [10], [11] and just papers that use MPLS in NOCs.
SYSTEM ARCHITECTURE
Fig. 2. Components of MPLS and MPLS-TP in NoCs.
The control plane mechanism is responsible for the setup of LSPs (dynamically or statically) across a MPLS network. The MPLS protocol suite supports a robust and mature dynamic control plane with protocols such as oSPf-TE, ISIS-TE, RSVP-TE, LDP, and BGP. The current transport networks, however, have been using a static control plane, i.e., the circuits are statically provisioned by an intelligent network management system (NMS). Dynamic control plane is optional with MPLS-TP. Static provisioning in MPLS has been supported by many vendors, including Juniper, for
4.1 MPLS Components and terms This section gives an overview of the terms associated with the MPLS technology. 1) Path Label (Associates a packet to a FEC) FEC(Forward Equivalence Class) : A subset of packets that are all treated the same way by an LSR LSP (Label Switch Path): path that a packet follows for a specific FEC Shim - Header containing a Label Stack Label Stack - Multiple labels containing information on how a packet is forwarded. 2) Routers LSR(Label Switched Router)An MPLS capable router LER(Label Edge Router)
JOURNAL OF COMPUTING, VOLUME 4, ISSUE 4, APRIL 2012, ISSN 2151-9617 https://sites.google.com/site/journalofcomputing WWW.JOURNALOFCOMPUTING.ORG
74
3) Protocol LDP (Label Distribution Protocol), used to distribute Label information between MPLS-aware network devices CR-LDP (constraint-based LDP) contains extensions for LDP to extend its capabilities. This allows extending the information used to setup paths beyond what is available for the routing protocol 4) MNS (MPLS Network Simulator) Mpls-Node PDU (Protocol Data Unit) 4.2 MPLS-NoC Architecture MPLS-NoC Architectures are composed of following components: 5) Label-Edge Router The Label Edge Router (LER) operates at the edge of an MPLS network. It is necessary to include an interface (IF) module to interact with different semi-global SoC/NoC [12]. 6) Label-Switched Router A Label Switch Router (LSR) is the main component of the MPLS network. It sets up a path to other MPLS routers and forwards packets to them. 7) Label-Switched Path(LSP) Within an MPLS domain, a path is set up for a given packet to travel on an FEC. The Label-Switched Path (LSP) is set up prior to data transmission. 8) MPLS-NOC MODELING 4.3 MPLS Operation The function of ingress LER is to put a label in the IP packet and forward it to the next hop in the MPLS network. This label is assigned according to the forwarding equivalence class (FEC) of the packet. In this case the IP packet is encapsulated in an MPLS PDU, with an MPLS shim header included in the packet. The main objectives of MPLS are accomplished using fixed-length labels. These labels included in an MPLS header are assigned considering FECs that determine the route of a datagram. The FECs are a representation of a group of packets that share the same requirements to their transport. These FECs can be used to support QoS operations (e.g. real time applications) [13]. This FEC to label relationship determine the Label Switched Path (LSP) of a datagram, from the ingress point to the egress point of the MPLS network. The LSP or tunnel at both ends of the MPLS network is a concatenation of the LSP segments between each node. In this tunnel the ingress node define the type of traffic and assigns a label. According to this label, the traffic is forwarded through the LSP without further examination. At the end of the tunnel, the egress node removes the label and forwards the traffic to an external network (e.g. an IP network). This type of tunnels allows the implementation of Traffic Engineering (TE) [6].
EVALUATIONS
5.1 Simulation Framework In this paper, we have modeled our MPLS-NoC architecture concepts with the widely used network simulator ns-2 [14]. NS-2 has been widely applied in research related to the design and evaluation of computer networks and to evaluate various design options for NoC architectures [15], including the design of routers, communication protocols, etc. 5.2 Hardware Architecture We use heterogeneous topology of Network on Chip that shown in Fig. 4.
Fig. 4. Hetrogeneous NoC with repetitive fault.
As shown in fig. 4, the node 0 and node 10 was communicated with each other , and a repetitive fault was occurs between switch 5 and switch 7, that the period of down and up was equals to 0.5 second. 5.3 Packet Sequence Number Packet sequence number was used to show the packet was reach to the destination node Respectively.
Fig. 5. Sequence number of control and data driven in MPLSNoC.
JOURNAL OF COMPUTING, VOLUME 4, ISSUE 4, APRIL 2012, ISSN 2151-9617 https://sites.google.com/site/journalofcomputing WWW.JOURNALOFCOMPUTING.ORG
75
The square part of above figure was shown as below:
CONCLUSION AND FUTUREWORK
This paper presents some of the results obtained by using Layer 3 packet forwarding in MPLS-NoC. We have to present a novel MPLS-NoC in Layer 3 that support the communication load of the cores.
7
[1]
REFERENCES
J. Park, I. Kim, S. Kim, S. Park, B. Koo, K. Shin, K. Seo, and J. Cha, MPEG-4 video codec on an ARM core and AMBA, in Proc. Of Workshop and Exhibition on MPEG-4, Jun. 2001, pp. 9598. R. Hofmann and B. Drerup, Next generation CoreConnect processor local bus architecture, in 15th Annual IEEE International ASIC/SOC Conference, Sep. 2002, pp. 221225. C. Roark and F. Jackson, New developments in a PI-Bus specification by the JIAWG and SAE, in Proc. of the IEEE National Aerospace and Electronics Conference, vol. 2, May 1992, pp. 760 766. S. Kubisch, C. Cornelius, R. Hecht, D. Timmermann, Mapping a Pipelined Data Path onto a Network-on-Chip, University of Rostock, Institute of Applied Microelectronics and Computer Engineering, 4-6 July 2007 Industrial Embedded Systems, 2007. M. Harmanci, N. Escudero, Y. Leblebici, and P. Ienne, Quantitative modelling and comparison of communication schemes to guarantee quality-of-service in networks-on-chip, in IEEE International Symposium on Circuits and Systems, vol. 2, May 2005, pp. 1782 1785. M. Minero-Muoz, V. Alarcon-Aquino, Reconfigurable Path Restoration Schemes for MPLS Networks, Infocomp Journal of Computer Science, Vol. 8, No2, June 2009; pp. 29-38. M. MINERO-MUOZ, V. ALARCON-AQUINO, Reconfigurable Path Restoration Schemes for MPLS Networks ,Department of Computing, Electronics, and Mechatronics Communications and Signal Processing Research Group UDLAP - Sta. Catarina Martir, Cholula Puebla MEXICO, April 26, 2009. K. Goossens, J. Dielissen, J. van Meerbergen, P. Poplavko, A. Rdulescu, E. Rijpkema, E. Waterlander, and P. Wielage, Guaranteeing the quality of services in networks on chip, pp. 61 82, 2003. MPLS Transport Profile (MPLS-TP), www.juniper.net/us/en/local/pdf/whitepapers/2000406-en.pdf. M. Kim, D. Kim and G. E. Sobelman, Network-on-Chip Quality-ofService through MultiProtocol Label Switching Department of Electrical and Computer Engineering, University of Minnesota, Minneapolis, MN 55455 USA. M.R.N, R.Kourdy, M.R.Nouri Rad, "Network-on-Chip Quality-ofService through MPLS Reservation Mechanism ", 2010 Second International Conference on Computer Research and Development, Kuala Lumpur, May 2010, pp. 775 778. R. Peterkin and D. Ionescu, Embedded MPLS Architecture, in Proc. of the 19th IEEE International Parallel and Distributed Processing Symposium, Apr. 2005, pp. 170a170a. Black, U. MPLS and Label Switching Networks. Prentice Hall PTR, Upper Saddle River, NJ, USA, 2002. www.isi.edu/nsnam/ns R. Lemaire, F. Clermidy, Y. Durand, D. Lattard, and A. Jerraya, Performance Evaluation of a NoC-Based Design for MC-CDMA Telecommunications Using NS-2, in The 16th IEEE International Workshop on Rapid System Prototyping, Jun. 2005, pp. 2430.
[2]
[3]
[4]
Fig. 6. Big of Sequence number of control and data driven in MPLS-NoC. As shown in fig. 5 and fig. 6, when a repetitive fault was occurs the L3 control driven fault recovery mechanism re-route the traffic to destination path, while L3 data driven mechanism caused to black hole and grab the traffic up to link repaired.
[5]
5.4 Communication Load
We reduce the rate as multiply of 1000 to support the simulation time. The data rate of each switch to switch link was equals to 0.5 Megabit/sec. The traffic between resource (IPs) and the switches was higher than the traffic between switch to switches. As shown in fig. 7, in MPLS-NoC with L3 control driven supports more bandwidth related to L3 data driven. This is because of L3 data driven was not re-route the traffic to destination node and the bandwidth reduces to zero.
[6]
[7]
[8]
[9] [10]
[11]
[12]
[13] [14] [15]
Fig. 7. Bandwidth of control and data driven in MPLS-NoC.
JOURNAL OF COMPUTING, VOLUME 4, ISSUE 4, APRIL 2012, ISSN 2151-9617 https://sites.google.com/site/journalofcomputing WWW.JOURNALOFCOMPUTING.ORG
76
Reza Kourdy received his B.Sc. Degree in Computer Engineering and his M.Sc. Degree in Computer Architecture both from Azad University of Arak, Iran, in 2002 and 2007, respectively. His research interests include Network-On-Chip Architecture and Fault-tolerance.
Mohammad Reza Nouri Rad received his B.Sc. Degree in Computer Engineering Software from Azad University of Najafabad, Iran, in 2001, and his M.Sc. Degree in Computer Software from Azad University of Arak, Iran, in 2010. His research interests include Network-OnChip Architecture and Network Security. He is Program Committee of following conferences : WICT 2011 CSNT 2011 CICN 2011 SocProS 2011 CSNT 2012 CICN 2012 BIC-TA 2012
Anda mungkin juga menyukai
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (121)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5795)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- Thoughts and Mood WorksheetsDokumen12 halamanThoughts and Mood Worksheetsjenfolz100% (5)
- Deep Coaching Scorecard v2 PDFDokumen5 halamanDeep Coaching Scorecard v2 PDFthisisvikas100% (1)
- Product Lifecycle Management Advantages and ApproachDokumen4 halamanProduct Lifecycle Management Advantages and ApproachJournal of ComputingBelum ada peringkat
- Cloud Computing: Deployment Issues For The Enterprise SystemsDokumen5 halamanCloud Computing: Deployment Issues For The Enterprise SystemsJournal of ComputingBelum ada peringkat
- Impact of Facebook Usage On The Academic Grades: A Case StudyDokumen5 halamanImpact of Facebook Usage On The Academic Grades: A Case StudyJournal of Computing100% (1)
- TFN (1) Alignment MatrixDokumen13 halamanTFN (1) Alignment MatrixJune Bars100% (1)
- Hybrid Network Coding Peer-to-Peer Content DistributionDokumen10 halamanHybrid Network Coding Peer-to-Peer Content DistributionJournal of ComputingBelum ada peringkat
- Complex Event Processing - A SurveyDokumen7 halamanComplex Event Processing - A SurveyJournal of ComputingBelum ada peringkat
- Business Process: The Model and The RealityDokumen4 halamanBusiness Process: The Model and The RealityJournal of ComputingBelum ada peringkat
- Divide and Conquer For Convex HullDokumen8 halamanDivide and Conquer For Convex HullJournal of Computing100% (1)
- Decision Support Model For Selection of Location Urban Green Public Open SpaceDokumen6 halamanDecision Support Model For Selection of Location Urban Green Public Open SpaceJournal of Computing100% (1)
- Energy Efficient Routing Protocol Using Local Mobile Agent For Large Scale WSNsDokumen6 halamanEnergy Efficient Routing Protocol Using Local Mobile Agent For Large Scale WSNsJournal of ComputingBelum ada peringkat
- K-Means Clustering and Affinity Clustering Based On Heterogeneous Transfer LearningDokumen7 halamanK-Means Clustering and Affinity Clustering Based On Heterogeneous Transfer LearningJournal of ComputingBelum ada peringkat
- Hiding Image in Image by Five Modulus Method For Image SteganographyDokumen5 halamanHiding Image in Image by Five Modulus Method For Image SteganographyJournal of Computing100% (1)
- An Approach To Linear Spatial Filtering Method Based On Anytime Algorithm For Real-Time Image ProcessingDokumen7 halamanAn Approach To Linear Spatial Filtering Method Based On Anytime Algorithm For Real-Time Image ProcessingJournal of ComputingBelum ada peringkat
- Consciousness vs. The Simulation of ConsciousnessDokumen4 halamanConsciousness vs. The Simulation of ConsciousnessVivian LamBelum ada peringkat
- NURS FPX 6011 Assessment 1 Evidence-Based Patient-Centered Concept MapDokumen4 halamanNURS FPX 6011 Assessment 1 Evidence-Based Patient-Centered Concept MapCarolyn HarkerBelum ada peringkat
- Early Childhood CariesDokumen13 halamanEarly Childhood Cariesrahul sharmaBelum ada peringkat
- TrendsDokumen3 halamanTrendsT S Troop BuddiesBelum ada peringkat
- Endorsement Letter KoolLDokumen2 halamanEndorsement Letter KoolLAldren Delina RiveraBelum ada peringkat
- Managing A Successful Computing ProjectDokumen20 halamanManaging A Successful Computing ProjectAryan AmatyaBelum ada peringkat
- Keeping Disabilities Secret British English StudentDokumen6 halamanKeeping Disabilities Secret British English StudentelisaBelum ada peringkat
- Universidad de Sta Isabel Pili CampusDokumen7 halamanUniversidad de Sta Isabel Pili CampusGlenn VergaraBelum ada peringkat
- Daily Lesson Plan in Grade 10 MathematicsDokumen6 halamanDaily Lesson Plan in Grade 10 MathematicsRandy Asilum AlipaoBelum ada peringkat
- Psycolinguistic - Ahmad Nur Yazid (14202241058)Dokumen3 halamanPsycolinguistic - Ahmad Nur Yazid (14202241058)Galih Rizal BasroniBelum ada peringkat
- Qualities of FacilitatorDokumen7 halamanQualities of FacilitatorThompho HakhakhiBelum ada peringkat
- List OpenedSchoolDokumen17 halamanList OpenedSchoolRamesh vlogsBelum ada peringkat
- tws-4 AssessmentDokumen5 halamantws-4 Assessmentapi-284346424Belum ada peringkat
- Podcast Rubric Y7Dokumen1 halamanPodcast Rubric Y7owenmccBelum ada peringkat
- A Semi-Detailed Lesson Plan in English Grade 8 Focus: Reading SkillDokumen4 halamanA Semi-Detailed Lesson Plan in English Grade 8 Focus: Reading SkillKim KimBelum ada peringkat
- US University Guide For JC StudentsDokumen20 halamanUS University Guide For JC Studentsvominhtu_acjcBelum ada peringkat
- Question Aware Vision Transformer For Multimodal ReasoningDokumen15 halamanQuestion Aware Vision Transformer For Multimodal ReasoningOnlyBy MyselfBelum ada peringkat
- Colegio de Calumpit Inc.: Iba O' Este, Calumpit, BulacanDokumen1 halamanColegio de Calumpit Inc.: Iba O' Este, Calumpit, BulacanJessie AndreiBelum ada peringkat
- Lesson 4 - Developing The Non-Dominant HandDokumen6 halamanLesson 4 - Developing The Non-Dominant HandBlaja AroraArwen AlexisBelum ada peringkat
- Cumberland Youth Football Registration 2021Dokumen3 halamanCumberland Youth Football Registration 2021api-293704297Belum ada peringkat
- E Book PerformanceDokumen396 halamanE Book PerformanceAnkur DhirBelum ada peringkat
- Bar Council of Tamil Nadu and Puducherry: High Court Campus, CHENNAI-600 104. Ph. No. 2534 2739Dokumen5 halamanBar Council of Tamil Nadu and Puducherry: High Court Campus, CHENNAI-600 104. Ph. No. 2534 2739Vajje MBABelum ada peringkat
- Radius Tangent Theorem DLL 2Dokumen5 halamanRadius Tangent Theorem DLL 2Eric de GuzmanBelum ada peringkat
- Grade 3 - FilipinoDokumen46 halamanGrade 3 - FilipinoVanessa Buates BolañosBelum ada peringkat
- Unidad 9Dokumen3 halamanUnidad 9Samanta GuanoquizaBelum ada peringkat
- Feral and Stray Cats - An Important Difference: BehaviorDokumen4 halamanFeral and Stray Cats - An Important Difference: BehaviorVinayak RaoBelum ada peringkat
- The Epistles of St. Paul Written After He Became A Prisoner Boise, James Robinson, 1815-1895Dokumen274 halamanThe Epistles of St. Paul Written After He Became A Prisoner Boise, James Robinson, 1815-1895David BaileyBelum ada peringkat