Anda mungkin juga menyukai
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (399)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (73)
- R2590 Maintanence Man Rev A 4-1-04Dokumen295 halamanR2590 Maintanence Man Rev A 4-1-04edilorenzo1Belum ada peringkat
- 03 Ad 02 AfDokumen3 halaman03 Ad 02 Afapi-127299018Belum ada peringkat
- 414 Edd 9 BDokumen30 halaman414 Edd 9 Bapi-127299018Belum ada peringkat
- Evaluation Notes Were Added To The Output Document. To Get Rid of These Notes, Please Order Your Copy of Eprint 5.0 NowDokumen3 halamanEvaluation Notes Were Added To The Output Document. To Get Rid of These Notes, Please Order Your Copy of Eprint 5.0 Nowapi-127299018Belum ada peringkat
- 2 A 724 D 02Dokumen18 halaman2 A 724 D 02api-127299018Belum ada peringkat
- The American PageantDokumen4 halamanThe American Pageantapi-127299018Belum ada peringkat
- C 99544 FeDokumen3 halamanC 99544 Feapi-127299018Belum ada peringkat
- Subject: Project Quote 1. General Info: 1.1. Main IdeaDokumen7 halamanSubject: Project Quote 1. General Info: 1.1. Main Ideaapi-127299018Belum ada peringkat
- The American PageantDokumen4 halamanThe American Pageantapi-127299018Belum ada peringkat
- C 99544 FeDokumen3 halamanC 99544 Feapi-127299018Belum ada peringkat
- Geometry Worksheet: For Questions 1-2, Use The Following DiagramDokumen7 halamanGeometry Worksheet: For Questions 1-2, Use The Following Diagramapi-127299018Belum ada peringkat
- Practice Problems - Chapter 33 Alternating Current Circuits: Multiple ChoiceDokumen4 halamanPractice Problems - Chapter 33 Alternating Current Circuits: Multiple Choiceapi-127299018Belum ada peringkat
- 03 Ad 02 AfDokumen3 halaman03 Ad 02 Afapi-127299018Belum ada peringkat
- 03 Ad 02 AfDokumen3 halaman03 Ad 02 Afapi-127299018Belum ada peringkat
- C 99544 FeDokumen3 halamanC 99544 Feapi-127299018Belum ada peringkat
- C 99544 FeDokumen3 halamanC 99544 Feapi-127299018Belum ada peringkat
- C 99544 FeDokumen3 halamanC 99544 Feapi-127299018Belum ada peringkat
- 6.01 Final Exam: Spring 2010: Name: SectionDokumen28 halaman6.01 Final Exam: Spring 2010: Name: Sectionapi-127299018Belum ada peringkat
- C 99544 FeDokumen3 halamanC 99544 Feapi-127299018Belum ada peringkat
- UntitledDokumen27 halamanUntitledapi-127299018Belum ada peringkat
- C 99544 FeDokumen3 halamanC 99544 Feapi-127299018Belum ada peringkat
- C 99544 FeDokumen3 halamanC 99544 Feapi-127299018Belum ada peringkat
- UntitledDokumen28 halamanUntitledapi-127299018Belum ada peringkat
- 6.01 Final Exam: Fall 2009: AnswersDokumen27 halaman6.01 Final Exam: Fall 2009: Answersapi-127299018Belum ada peringkat
- C 99544 FeDokumen3 halamanC 99544 Feapi-127299018Belum ada peringkat
- 6.01 Final Exam Spring 2011: Name: SectionDokumen27 halaman6.01 Final Exam Spring 2011: Name: Sectionapi-127299018Belum ada peringkat
- 6.01 Final Exam: Fall 2010: Name: SectionDokumen25 halaman6.01 Final Exam: Fall 2010: Name: Sectionapi-127299018Belum ada peringkat
- 6.01 Final Exam: Fall 2010: Name: SectionDokumen25 halaman6.01 Final Exam: Fall 2010: Name: Sectionapi-127299018Belum ada peringkat
- UntitledDokumen27 halamanUntitledapi-127299018Belum ada peringkat
- 6.01 Final Exam: Spring 2009: NameDokumen24 halaman6.01 Final Exam: Spring 2009: Nameapi-127299018Belum ada peringkat
- 6.01 Final Exam: Spring 2009: NameDokumen24 halaman6.01 Final Exam: Spring 2009: Nameapi-127299018Belum ada peringkat
- DLC LAB - 08 - Student - ManualDokumen10 halamanDLC LAB - 08 - Student - ManualImtiaj SajinBelum ada peringkat
- Untitled DocumentDokumen24 halamanUntitled DocumentRami ReddyBelum ada peringkat
- Digital Lab Manual V2.1Dokumen120 halamanDigital Lab Manual V2.1Marwan AffandiBelum ada peringkat
- Chip IO Circuit Design - Electrostatic Discharge Protection DesignDokumen25 halamanChip IO Circuit Design - Electrostatic Discharge Protection DesignVăn CôngBelum ada peringkat
- CD4049/CD4050 Hex Buffer GuideDokumen6 halamanCD4049/CD4050 Hex Buffer Guidecemtech06Belum ada peringkat
- Analog CMOS Integrated Circuits For High-Temperature Operation With Leakage Current CompensationDokumen4 halamanAnalog CMOS Integrated Circuits For High-Temperature Operation With Leakage Current CompensationDalton ColomboBelum ada peringkat
- MAX32xx, Serial To TTLDokumen17 halamanMAX32xx, Serial To TTLDecker JamesBelum ada peringkat
- Cmos Digital Vlsi Design: Combinational Logic Design-IVDokumen14 halamanCmos Digital Vlsi Design: Combinational Logic Design-IVSrikanth PasumarthyBelum ada peringkat
- PIC16F716Dokumen136 halamanPIC16F716paulojfeitozaBelum ada peringkat
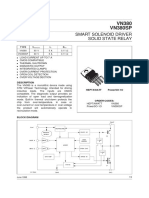
- VN380 VN380SP: Smart Solenoid Driver Solid State RelayDokumen9 halamanVN380 VN380SP: Smart Solenoid Driver Solid State RelayDan EsentherBelum ada peringkat
- VN380 Smart Solenoid Driver SpecificationsDokumen10 halamanVN380 Smart Solenoid Driver SpecificationsAdan Pérez EchevarríaBelum ada peringkat
- A 1.5-V, 1.5-GHz CMOS Low Noise Amplifier - Solid-State Circuits, IEEE Journal of PDFDokumen15 halamanA 1.5-V, 1.5-GHz CMOS Low Noise Amplifier - Solid-State Circuits, IEEE Journal of PDFAnirban HomroyBelum ada peringkat
- R1632043 III B. Tech II Semester Regular Examinations VLSI DesignDokumen4 halamanR1632043 III B. Tech II Semester Regular Examinations VLSI Designpawan100% (1)
- REN RC310xxA DST 20230531Dokumen67 halamanREN RC310xxA DST 20230531杉澤 佑樹Belum ada peringkat
- Miller CapacitanceDokumen6 halamanMiller CapacitanceKeerthi Kumar DBelum ada peringkat
- 82C55A CMOS Programmable Peripheral InterfaceDokumen26 halaman82C55A CMOS Programmable Peripheral InterfaceNikolay Ysayaka HatakeBelum ada peringkat
- Infineon Bts409l1 E3062a Ds v01 00 enDokumen13 halamanInfineon Bts409l1 E3062a Ds v01 00 enDendi ArisetiawanBelum ada peringkat
- Research Paper On Vlsi TestingDokumen6 halamanResearch Paper On Vlsi Testinggw08nnfr100% (1)
- CD4009 CMOS Hex Buffers/Converter Features and SpecificationsDokumen8 halamanCD4009 CMOS Hex Buffers/Converter Features and SpecificationsGenesis RosarioBelum ada peringkat
- Tda8359 PDFDokumen20 halamanTda8359 PDFsiliboyBelum ada peringkat
- Digital Electronics Lab ManualDokumen80 halamanDigital Electronics Lab ManualRohitkumar RathodBelum ada peringkat
- 2019 AdderDokumen10 halaman2019 AdderCorrisionbluryBelum ada peringkat
- Opamp ProjectDokumen10 halamanOpamp Projectbirla_sBelum ada peringkat
- Skew DesignDokumen29 halamanSkew DesignAshok KoyyalamudiBelum ada peringkat
- Week 1 - Lectures PDFDokumen58 halamanWeek 1 - Lectures PDFHassan El-shazlyBelum ada peringkat
- CH 02 FabricationDokumen55 halamanCH 02 FabricationUPADHYAY SHIVANSHBelum ada peringkat
- CD 4050Dokumen7 halamanCD 4050nicolaunmBelum ada peringkat
- Bit Comparator Using Different Logic Style of Full AdderDokumen3 halamanBit Comparator Using Different Logic Style of Full Adderfabio-delima8012Belum ada peringkat
- Chapter 3 Analysis of Logic CircuitsDokumen22 halamanChapter 3 Analysis of Logic Circuitsee206023Belum ada peringkat