Anda mungkin juga menyukai
- PolymerizationDokumen30 halamanPolymerizationSolha MubarakBelum ada peringkat
- Analysis of Cost EstimationDokumen58 halamanAnalysis of Cost Estimationccsreddy100% (3)
- 17 - Gas Absorption PrinciplesDokumen20 halaman17 - Gas Absorption PrinciplesSolha MubarakBelum ada peringkat
- Fuels and CombustionDokumen28 halamanFuels and CombustionDrupad PatelBelum ada peringkat
- Smith - Van Ness - Abbot - Chemical Engineering Thermodynamics - 2Dokumen621 halamanSmith - Van Ness - Abbot - Chemical Engineering Thermodynamics - 2Solha MubarakBelum ada peringkat
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (399)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (73)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (120)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- A Case Study From The: PhilippinesDokumen2 halamanA Case Study From The: PhilippinesNimBelum ada peringkat
- 1610-2311-Executive Summary-EnDokumen15 halaman1610-2311-Executive Summary-EnKayzha Shafira Ramadhani460 105Belum ada peringkat
- Airport Demand ModelDokumen26 halamanAirport Demand ModelbsvseyBelum ada peringkat
- Steris Amsco Century v120Dokumen2 halamanSteris Amsco Century v120Juan OrtizBelum ada peringkat
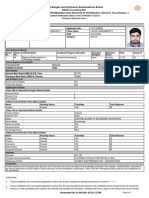
- West Bengal Joint Entrance Examinations Board: Provisional Admission LetterDokumen2 halamanWest Bengal Joint Entrance Examinations Board: Provisional Admission Lettertapas chakrabortyBelum ada peringkat
- Scout Activities On The Indian Railways - Original Order: MC No. SubjectDokumen4 halamanScout Activities On The Indian Railways - Original Order: MC No. SubjectVikasvijay SinghBelum ada peringkat
- Mind Mapping BIOTEKDokumen1 halamanMind Mapping BIOTEKAdrian Muhammad RonalBelum ada peringkat
- South West Mining LTD - Combined CFO & HWA - VerDokumen8 halamanSouth West Mining LTD - Combined CFO & HWA - Verapi-3809359Belum ada peringkat
- Cam 12 Test 2 ReadingDokumen7 halamanCam 12 Test 2 ReadingLê Nguyễn Ái DuyênBelum ada peringkat
- 671 - BP Well Control Tool Kit 2002Dokumen19 halaman671 - BP Well Control Tool Kit 2002Ibama MirillaBelum ada peringkat
- MAS-02 Cost Terms, Concepts and BehaviorDokumen4 halamanMAS-02 Cost Terms, Concepts and BehaviorMichael BaguyoBelum ada peringkat
- Claim Age Pension FormDokumen25 halamanClaim Age Pension FormMark LordBelum ada peringkat
- 15.910 Draft SyllabusDokumen10 halaman15.910 Draft SyllabusSaharBelum ada peringkat
- 13 - Conclusion and SuggestionsDokumen4 halaman13 - Conclusion and SuggestionsjothiBelum ada peringkat
- RA 9184 & RA 3019 NotesDokumen5 halamanRA 9184 & RA 3019 Notesleng_evenBelum ada peringkat
- E14r50p01 800 MhaDokumen4 halamanE14r50p01 800 Mha'Theodora GeorgianaBelum ada peringkat
- Innova M3 New: 3. InstallationDokumen8 halamanInnova M3 New: 3. InstallationAndreea DanielaBelum ada peringkat
- 2 Players The One With Steam BaronsDokumen1 halaman2 Players The One With Steam BaronsBrad RoseBelum ada peringkat
- BSDC CCOE DRAWING FOR 2x6 KL R-1Dokumen1 halamanBSDC CCOE DRAWING FOR 2x6 KL R-1best viedosBelum ada peringkat
- Galanz - Galaxy 7-9-12K - SPLIT PDFDokumen42 halamanGalanz - Galaxy 7-9-12K - SPLIT PDFUbaldo BritoBelum ada peringkat
- Personal Information: Witec Smaranda 11, A3 Bis, Blvd. Chisinau, Bucharest, Romania 0040722597553Dokumen6 halamanPersonal Information: Witec Smaranda 11, A3 Bis, Blvd. Chisinau, Bucharest, Romania 0040722597553MirelaRoșcaBelum ada peringkat
- GGSB MibDokumen4 halamanGGSB MibShrey BudhirajaBelum ada peringkat
- Future Generation Computer SystemsDokumen18 halamanFuture Generation Computer SystemsEkoBelum ada peringkat
- Radix Sort - Wikipedia, The Free EncyclopediaDokumen13 halamanRadix Sort - Wikipedia, The Free EncyclopediasbaikunjeBelum ada peringkat
- Burberry Annual Report 2019-20 PDFDokumen277 halamanBurberry Annual Report 2019-20 PDFSatya PhaneendraBelum ada peringkat
- Midterm Quiz 01 - Adjusting Entries From Accrual To Provision For Uncollectible AccountsDokumen3 halamanMidterm Quiz 01 - Adjusting Entries From Accrual To Provision For Uncollectible AccountsGarp Barroca100% (1)
- X606 PDFDokumen1 halamanX606 PDFDany OrioliBelum ada peringkat
- Hi 3 Yt 318201Dokumen3 halamanHi 3 Yt 318201partha khatuaBelum ada peringkat
- cv20672778 Prashanth - Sadak Operations-ManagerDokumen4 halamancv20672778 Prashanth - Sadak Operations-ManagerBhasker NiftyBelum ada peringkat
- Wilo49608 Wilo Ge LeafletDokumen46 halamanWilo49608 Wilo Ge LeafletJair Jimenez HerreraBelum ada peringkat