Anda mungkin juga menyukai
- 6.01 Final Exam: Spring 2009: NameDokumen24 halaman6.01 Final Exam: Spring 2009: Nameapi-127299018Belum ada peringkat
- Oefentt Jaar 3Dokumen11 halamanOefentt Jaar 3Branco SieljesBelum ada peringkat
- Test 1: CPS 100: Owen Astrachan October 1, 2004Dokumen14 halamanTest 1: CPS 100: Owen Astrachan October 1, 2004Gobara DhanBelum ada peringkat
- Bcs Higher Education Qualifications BCS Level 4 Certificate in IT April 2011 Examiner'S Report Software DevelopmentDokumen22 halamanBcs Higher Education Qualifications BCS Level 4 Certificate in IT April 2011 Examiner'S Report Software DevelopmentJessica TiffanyBelum ada peringkat
- ISC Computer Science Question Paper 2016 Solved For Class 12 - A Plus Topper 3Dokumen1 halamanISC Computer Science Question Paper 2016 Solved For Class 12 - A Plus Topper 3samm guptaBelum ada peringkat
- 1 Hw6 SolutionsDokumen8 halaman1 Hw6 SolutionsdavejaiBelum ada peringkat
- Vrije University December 2015 programming exam solutionsDokumen4 halamanVrije University December 2015 programming exam solutionsOumayma El KadiBelum ada peringkat
- Open in 2022 PDFDokumen11 halamanOpen in 2022 PDFstargazxrBelum ada peringkat
- CSCE 156 Homework 05 Spring 2012 Algorithm Analysis and SortingDokumen6 halamanCSCE 156 Homework 05 Spring 2012 Algorithm Analysis and SortingNico ScheinostBelum ada peringkat
- FDSFSDDokumen6 halamanFDSFSDPotatoBelum ada peringkat
- Major2022 Setb V3solutionsDokumen11 halamanMajor2022 Setb V3solutionsGavin BelsonBelum ada peringkat
- Data Structures Using C: Graphs, Trees, QueuesDokumen21 halamanData Structures Using C: Graphs, Trees, QueuesKothai KothaiBelum ada peringkat
- ANINON, RG. - EcE 224 Lab Report 2Dokumen41 halamanANINON, RG. - EcE 224 Lab Report 2Rica AniñonBelum ada peringkat
- Test 1: Compsci 100: Owen Astrachan September 30, 2009Dokumen17 halamanTest 1: Compsci 100: Owen Astrachan September 30, 2009Gobara DhanBelum ada peringkat
- Midterm Exam: CS 188 Introduction To Fall 2008 Artificial IntelligenceDokumen12 halamanMidterm Exam: CS 188 Introduction To Fall 2008 Artificial IntelligenceSamip KalyaniBelum ada peringkat
- Final Exam - Design and Analysis of Algorithms - Fall 2010 Semester - SolDokumen7 halamanFinal Exam - Design and Analysis of Algorithms - Fall 2010 Semester - SolAbdul RaufBelum ada peringkat
- Homework Index: To See If The Questions Have Been Changed, or If You Are Required To Use Different Data or ExamplesDokumen86 halamanHomework Index: To See If The Questions Have Been Changed, or If You Are Required To Use Different Data or ExamplesasBelum ada peringkat
- Fluid Dynamics Assignment for Potential FlowDokumen9 halamanFluid Dynamics Assignment for Potential FlowUmar AshrafBelum ada peringkat
- Computer Programming - Seminary WorkDokumen15 halamanComputer Programming - Seminary WorkIONUȚ-DRAGOȘ NEREMZOIUBelum ada peringkat
- Lab1 - Basics of MatlabDokumen49 halamanLab1 - Basics of MatlabA BBelum ada peringkat
- 6.01 Midterm 1: Spring 2010: SolutionsDokumen15 halaman6.01 Midterm 1: Spring 2010: Solutionsapi-127299018Belum ada peringkat
- ### Note V5 - Frequency Response WTH Bode Plot NEW VERSION 2023Dokumen22 halaman### Note V5 - Frequency Response WTH Bode Plot NEW VERSION 2023Okewunmi PaulBelum ada peringkat
- AI and ML Lab Manual 2022Dokumen37 halamanAI and ML Lab Manual 2022Lakshmi G NBelum ada peringkat
- Simple Problems For PracticeDokumen7 halamanSimple Problems For PracticeKarthik ReddyBelum ada peringkat
- UntitledDokumen1.326 halamanUntitledAnugrah StanleyBelum ada peringkat
- Nagarro 1Dokumen6 halamanNagarro 1Abhinav NigamBelum ada peringkat
- TCS Ninja TestDokumen8 halamanTCS Ninja TestPrakhar SaxenaBelum ada peringkat
- ESO207A-Shortest Paths HomeworkDokumen1 halamanESO207A-Shortest Paths HomeworkPulkit GuptaBelum ada peringkat
- Multistage BackwardDokumen13 halamanMultistage BackwardRama SugavanamBelum ada peringkat
- Cosc 2836 Test #2 (Matlab)Dokumen11 halamanCosc 2836 Test #2 (Matlab)MarkBelum ada peringkat
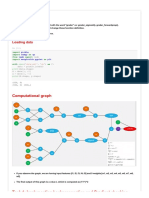
- Backpropagation: Loading DataDokumen12 halamanBackpropagation: Loading Datasatyamgovilla007_747Belum ada peringkat
- 170 DisDokumen5 halaman170 DisElan FrenkelBelum ada peringkat
- ISE 208 Homework: Arrays, Classes, Prime NumbersDokumen4 halamanISE 208 Homework: Arrays, Classes, Prime NumbersFei KouBelum ada peringkat
- MATLABDokumen47 halamanMATLABMaryam KausarBelum ada peringkat
- Polynomials and Partial Fraction ExpansionDokumen17 halamanPolynomials and Partial Fraction ExpansionPaul The HumanBelum ada peringkat
- Basic Matlab ExercisesDokumen11 halamanBasic Matlab ExercisesAntony Real100% (1)
- CS70 Midterm Exam 1 Summer 2010Dokumen9 halamanCS70 Midterm Exam 1 Summer 2010Bhupinder Pal SinghBelum ada peringkat
- Computing Z-Transforms and Convolution in MATLABDokumen12 halamanComputing Z-Transforms and Convolution in MATLABI190845 Samana NayyabBelum ada peringkat
- Q1 - ProgramDokumen9 halamanQ1 - ProgramRavi KaniyawalaBelum ada peringkat
- Week 2 - Simple C++ ProgramsDokumen4 halamanWeek 2 - Simple C++ Programsphysicist sharmaBelum ada peringkat
- Scilab 6Dokumen9 halamanScilab 6souvik5000Belum ada peringkat
- Math 2200 Practice Test 3 TitleDokumen8 halamanMath 2200 Practice Test 3 TitleYousif KashatBelum ada peringkat
- Question NoDokumen13 halamanQuestion NoWhite chilliesBelum ada peringkat
- The University of NottinghamDokumen4 halamanThe University of NottinghamP6E7P7Belum ada peringkat
- Unit 3 - Analysis Design of Algorithm - WWW - Rgpvnotes.inDokumen8 halamanUnit 3 - Analysis Design of Algorithm - WWW - Rgpvnotes.inPranjal ChawdaBelum ada peringkat
- Assignment 1 DS (Chapter 1 and 2)Dokumen4 halamanAssignment 1 DS (Chapter 1 and 2)Abubakar abdullahiBelum ada peringkat
- CSCI 2132 Final Exam Solutions: Faculty of Computer ScienceDokumen18 halamanCSCI 2132 Final Exam Solutions: Faculty of Computer SciencennBelum ada peringkat
- Answer To Experiments.Dokumen10 halamanAnswer To Experiments.Nicholson ZapantaBelum ada peringkat
- Introduction To Matlab Program: A. Basic Vector and Matrix OperationsDokumen2 halamanIntroduction To Matlab Program: A. Basic Vector and Matrix Operationsleileilei65Belum ada peringkat
- Experiment No 5 AOADokumen11 halamanExperiment No 5 AOAshubhamjadhav82416Belum ada peringkat
- ES103Dokumen2 halamanES103BUNTY GUPTABelum ada peringkat
- Dbms S9Dokumen7 halamanDbms S9Avinash SinghBelum ada peringkat
- Java How To Program, 5/e Test Item File 1 of 3Dokumen3 halamanJava How To Program, 5/e Test Item File 1 of 3Leonardo MatteraBelum ada peringkat
- Input and Output (Solved)Dokumen11 halamanInput and Output (Solved)Pranav TandonBelum ada peringkat
- Transformed E&M I Homework Curvilinear Coordinates: (Griffiths Chapter 1)Dokumen10 halamanTransformed E&M I Homework Curvilinear Coordinates: (Griffiths Chapter 1)Abdul RajakBelum ada peringkat
- Basic Simulation Lab FileDokumen9 halamanBasic Simulation Lab FileSam SamBelum ada peringkat
- Programming in MATLAB: ELEC 206 Computer Applications For Electrical Engineers Dr. Ron HayneDokumen25 halamanProgramming in MATLAB: ELEC 206 Computer Applications For Electrical Engineers Dr. Ron HayneBattula Santhosh KumarBelum ada peringkat
- Week 1Dokumen6 halamanWeek 1Muhammed Razi MBelum ada peringkat
- Da9c0b1dendsem 2020Dokumen18 halamanDa9c0b1dendsem 2020Aryan kanojiaBelum ada peringkat
- A Brief Introduction to MATLAB: Taken From the Book "MATLAB for Beginners: A Gentle Approach"Dari EverandA Brief Introduction to MATLAB: Taken From the Book "MATLAB for Beginners: A Gentle Approach"Penilaian: 2.5 dari 5 bintang2.5/5 (2)
- 2 A 724 D 02Dokumen18 halaman2 A 724 D 02api-127299018Belum ada peringkat
- 414 Edd 9 BDokumen30 halaman414 Edd 9 Bapi-127299018Belum ada peringkat
- 03 Ad 02 AfDokumen3 halaman03 Ad 02 Afapi-127299018Belum ada peringkat
- 03 Ad 02 AfDokumen3 halaman03 Ad 02 Afapi-127299018Belum ada peringkat
- C 99544 FeDokumen3 halamanC 99544 Feapi-127299018Belum ada peringkat
- Evaluation Notes Were Added To The Output Document. To Get Rid of These Notes, Please Order Your Copy of Eprint 5.0 NowDokumen3 halamanEvaluation Notes Were Added To The Output Document. To Get Rid of These Notes, Please Order Your Copy of Eprint 5.0 Nowapi-127299018Belum ada peringkat
- Geometry Worksheet: For Questions 1-2, Use The Following DiagramDokumen7 halamanGeometry Worksheet: For Questions 1-2, Use The Following Diagramapi-127299018Belum ada peringkat
- Subject: Project Quote 1. General Info: 1.1. Main IdeaDokumen7 halamanSubject: Project Quote 1. General Info: 1.1. Main Ideaapi-127299018Belum ada peringkat
- The American PageantDokumen4 halamanThe American Pageantapi-127299018Belum ada peringkat
- The American PageantDokumen4 halamanThe American Pageantapi-127299018Belum ada peringkat
- C 99544 FeDokumen3 halamanC 99544 Feapi-127299018Belum ada peringkat
- Practice Problems - Chapter 33 Alternating Current Circuits: Multiple ChoiceDokumen4 halamanPractice Problems - Chapter 33 Alternating Current Circuits: Multiple Choiceapi-127299018Belum ada peringkat
- C 99544 FeDokumen3 halamanC 99544 Feapi-127299018Belum ada peringkat
- C 99544 FeDokumen3 halamanC 99544 Feapi-127299018Belum ada peringkat
- 03 Ad 02 AfDokumen3 halaman03 Ad 02 Afapi-127299018Belum ada peringkat
- 6.01 Final Exam: Spring 2010: Name: SectionDokumen28 halaman6.01 Final Exam: Spring 2010: Name: Sectionapi-127299018Belum ada peringkat
- C 99544 FeDokumen3 halamanC 99544 Feapi-127299018Belum ada peringkat
- C 99544 FeDokumen3 halamanC 99544 Feapi-127299018Belum ada peringkat
- 6.01 Final Exam: Fall 2010: Name: SectionDokumen25 halaman6.01 Final Exam: Fall 2010: Name: Sectionapi-127299018Belum ada peringkat
- C 99544 FeDokumen3 halamanC 99544 Feapi-127299018Belum ada peringkat
- C 99544 FeDokumen3 halamanC 99544 Feapi-127299018Belum ada peringkat
- C 99544 FeDokumen3 halamanC 99544 Feapi-127299018Belum ada peringkat
- UntitledDokumen27 halamanUntitledapi-127299018Belum ada peringkat
- UntitledDokumen28 halamanUntitledapi-127299018Belum ada peringkat
- 6.01 Final Exam Spring 2011: Name: SectionDokumen27 halaman6.01 Final Exam Spring 2011: Name: Sectionapi-127299018Belum ada peringkat
- 6.01 Final Exam: Fall 2009: AnswersDokumen27 halaman6.01 Final Exam: Fall 2009: Answersapi-127299018Belum ada peringkat
- 6.01 Final Exam: Fall 2010: Name: SectionDokumen25 halaman6.01 Final Exam: Fall 2010: Name: Sectionapi-127299018Belum ada peringkat
- UntitledDokumen27 halamanUntitledapi-127299018Belum ada peringkat
- Alternative Foundation Option by Jet Grouting Pile MethodDokumen8 halamanAlternative Foundation Option by Jet Grouting Pile MethodVanDuongNguyenBelum ada peringkat
- Ringkasan Optimasi Formula Sediaan Sirup Mukolitik in (Hibiscus Rosa-Sinensis L.)Dokumen30 halamanRingkasan Optimasi Formula Sediaan Sirup Mukolitik in (Hibiscus Rosa-Sinensis L.)rahmi73Belum ada peringkat
- Learning Objectives-2: Uniform MotionDokumen7 halamanLearning Objectives-2: Uniform MotionBryanHarold BrooBelum ada peringkat
- MSDS Lipotronik Reagen KitDokumen6 halamanMSDS Lipotronik Reagen Kitlaboratorium rsst klaten100% (1)
- Ut Procedure 1Dokumen8 halamanUt Procedure 1abhinavsmash66666Belum ada peringkat
- 1.2 Student Workbook ESSDokumen7 halaman1.2 Student Workbook ESSTanay shahBelum ada peringkat
- 2 Stage GearboxDokumen47 halaman2 Stage GearboxSanad Shajahan0% (1)
- Energy-Momentum Tensor For The Electromagnetic Field in A Dispersive MediumDokumen17 halamanEnergy-Momentum Tensor For The Electromagnetic Field in A Dispersive MediumSamrat RoyBelum ada peringkat
- Power Transmission: Components Used To Transmit Power: Gears, Belt, Clutch and BrakesDokumen17 halamanPower Transmission: Components Used To Transmit Power: Gears, Belt, Clutch and Brakesrip111176Belum ada peringkat
- Advances in Heat Transfer 2 (1965)Dokumen469 halamanAdvances in Heat Transfer 2 (1965)alejandro_baro419Belum ada peringkat
- Eurotherm 2116Dokumen156 halamanEurotherm 2116jessicrmBelum ada peringkat
- Harmonic excitation of 1-degree-of-freedom systemsDokumen1 halamanHarmonic excitation of 1-degree-of-freedom systemsLetty VianaBelum ada peringkat
- Rock Sizing For Culvert Outlets PDFDokumen0 halamanRock Sizing For Culvert Outlets PDFwrobinsonf2scomBelum ada peringkat
- Rockwell Scale PDFDokumen5 halamanRockwell Scale PDFFortune FireBelum ada peringkat
- Mendocino Motor Control ApproachesDokumen6 halamanMendocino Motor Control ApproachesAngélica María CastrillónBelum ada peringkat
- Interference QuestionsDokumen11 halamanInterference QuestionsKhaled SaadiBelum ada peringkat
- UP Diliman Course AssignmentsDokumen82 halamanUP Diliman Course Assignmentsgamingonly_accountBelum ada peringkat
- WinspireDokumen44 halamanWinspireBhanu PrakashBelum ada peringkat
- Volumes by Cylindrical ShellsDokumen7 halamanVolumes by Cylindrical Shellseomer1968Belum ada peringkat
- Ch-27.2 Crystalline Materials - Detects in Crystalline MaterialsDokumen102 halamanCh-27.2 Crystalline Materials - Detects in Crystalline MaterialsasjfgauojfgfBelum ada peringkat
- Catalog WefatermDokumen55 halamanCatalog WefatermAlin NicolaeBelum ada peringkat
- Cooling PDFDokumen656 halamanCooling PDFTrầnNgọcCườngBelum ada peringkat
- Water Chemistry PDFDokumen24 halamanWater Chemistry PDFravichan_2010Belum ada peringkat
- Horizontal Twin-Shaft Paddle Mixers - The Ultimate in Mixing TechnologyDokumen5 halamanHorizontal Twin-Shaft Paddle Mixers - The Ultimate in Mixing TechnologyMilling and Grain magazineBelum ada peringkat
- Siesmic Protection Ufc 3 310 04Dokumen128 halamanSiesmic Protection Ufc 3 310 04irastemhemBelum ada peringkat
- Biomechanics and Motor Control of Human Movement - Ch3Dokumen37 halamanBiomechanics and Motor Control of Human Movement - Ch3guillecabezaBelum ada peringkat
- Astm E448-82 R02 E02 PDFDokumen5 halamanAstm E448-82 R02 E02 PDFJORGE ARTURO TORIBIO HUERTABelum ada peringkat
- Panel Dual Polarization Half-Power Beam Width Fixed Electrical DowntiltDokumen2 halamanPanel Dual Polarization Half-Power Beam Width Fixed Electrical DowntiltEmmersonLisboaBelum ada peringkat
- Causarin Act.3 Psychology 9.14-9.20Dokumen2 halamanCausarin Act.3 Psychology 9.14-9.20Denise CausarinBelum ada peringkat
- Romax 4000 PDFDokumen2 halamanRomax 4000 PDFALEKSANDARBelum ada peringkat