Anda mungkin juga menyukai
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (121)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- CPL Procedure NewDokumen5 halamanCPL Procedure NewShibin JohneyBelum ada peringkat
- Instrumentation - Aeroplanes: 22.01. Flight InstrumentsDokumen28 halamanInstrumentation - Aeroplanes: 22.01. Flight InstrumentsVeena Divya Krishnappa100% (1)
- 2017 Camm Er Data SheetDokumen2 halaman2017 Camm Er Data SheetFanamar MarBelum ada peringkat
- Intermodal Transport Solution Cluj-NapocaDokumen218 halamanIntermodal Transport Solution Cluj-NapocaAlex MozoranBelum ada peringkat
- Velocity DiagramDokumen4 halamanVelocity DiagramlitrakhanBelum ada peringkat
- Dont Stop Me NowDokumen2 halamanDont Stop Me NowparaiaBelum ada peringkat
- HAC AeroOverview 2020 Web OktDokumen69 halamanHAC AeroOverview 2020 Web OktAnonymous KaoLHAktBelum ada peringkat
- 2014 0663 PaperDokumen5 halaman2014 0663 PaperKlop KlopensonnBelum ada peringkat
- Operational Excellence of Southwest AirlineDokumen17 halamanOperational Excellence of Southwest Airlinevinay1805Belum ada peringkat
- Especificacao TDQ 809015Dokumen1 halamanEspecificacao TDQ 809015alanevejrBelum ada peringkat
- P2 Rating: Flight Fundamentals (Part 1: Basics of Flight) Lesson 10: Lifting Me Higher and HigherDokumen6 halamanP2 Rating: Flight Fundamentals (Part 1: Basics of Flight) Lesson 10: Lifting Me Higher and HigherThar LattBelum ada peringkat
- Plane Power Reference GuideDokumen1 halamanPlane Power Reference GuideSkySupplyUSABelum ada peringkat
- CAMP MTX EWOIntroductionDokumen7 halamanCAMP MTX EWOIntroductionduythienddtBelum ada peringkat
- Mechatronics Case Study: Wireless Surveillance BalloonDokumen14 halamanMechatronics Case Study: Wireless Surveillance BalloonSanit Bhatkar100% (3)
- Supplementary Formulae SheetDokumen2 halamanSupplementary Formulae SheetTony WANGBelum ada peringkat
- Continuous-Stirred Tank Reactor DesignDokumen42 halamanContinuous-Stirred Tank Reactor DesignYardena FigaresBelum ada peringkat
- Mechanical Design of Turine EginesDokumen51 halamanMechanical Design of Turine EginessriniBelum ada peringkat
- Arrow ChecklistDokumen5 halamanArrow ChecklistinferplBelum ada peringkat
- Challenger DisasterDokumen2 halamanChallenger DisasterZi ChinBelum ada peringkat
- Doublet Lattice Method PDFDokumen13 halamanDoublet Lattice Method PDFAlvaroFernandezVillarBelum ada peringkat
- CASA CPL GK Jan 2004Dokumen173 halamanCASA CPL GK Jan 2004Allen Cheng100% (3)
- Prescolite Akt4 WH Specsheet 13Dokumen2 halamanPrescolite Akt4 WH Specsheet 13James HohensteinBelum ada peringkat
- AeroelasticityDokumen24 halamanAeroelasticityShanthipriya Guru100% (1)
- Flying in The StratosphereDokumen6 halamanFlying in The StratosphereAmir BahramiBelum ada peringkat
- Piping Wind LoadsDokumen2 halamanPiping Wind LoadsAbhishek GorkarBelum ada peringkat
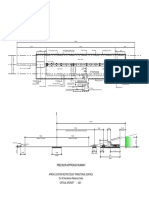
- New Airport Construction Standard 4C Precision Approach Runway Runway Strip Width: 300M Critical Aircraft: A321Dokumen1 halamanNew Airport Construction Standard 4C Precision Approach Runway Runway Strip Width: 300M Critical Aircraft: A321Sheena BautistaBelum ada peringkat
- DH B3 Mineta Interview FDR - Questions and Handwritten Interview Notes - Do The Orders Still StandDokumen19 halamanDH B3 Mineta Interview FDR - Questions and Handwritten Interview Notes - Do The Orders Still Stand9/11 Document ArchiveBelum ada peringkat
- Risk Management PPT#2Dokumen18 halamanRisk Management PPT#2Ali Izhar100% (1)
- Aerospace 1509Dokumen60 halamanAerospace 1509DucNguyenBelum ada peringkat