Etudionet Doc 071212034613
Diunggah oleh
Bassem MahfoudhJudul Asli
Hak Cipta
Format Tersedia
Bagikan dokumen Ini
Apakah menurut Anda dokumen ini bermanfaat?
Apakah konten ini tidak pantas?
Laporkan Dokumen IniHak Cipta:
Format Tersedia
Etudionet Doc 071212034613
Diunggah oleh
Bassem MahfoudhHak Cipta:
Format Tersedia
Commande du moteur pas pas
par PC
INSAT-TUNILUX
Les moteurs prennent dans notre socit moderne une place assez importante. Aujourd'hui ils sont devenus indispensables dans notre vie de tous les jours. En effet, depuis le robot mnager jusqu' limprimante, les moteurs lectriques sont prsents tout au long de notre journe. Le moteur pas pas, est un petit pas pour l'homme, mais un grand pas pour les petits lectroniciens. En effet, un moteur pas pas stepping motor en anglais - n'est rien d'autre qu'un moteur lectrique de prcision. Et quelle prcision ? Nous pouvons atteindre des dplacements de quelques degrs seulement. Un moteur classique n'est pas assez prcis pour certaines applications. Dans le cas d'une imprimante par exemple, il est ncessaire de pouvoir dplacer le rouleau qui guide le papier d'une mme distance chaque fois et cela, au millimtre prs .Imaginons quel serait le monde informatique s'il n'y avait pas de tels moteurs .Les imprimantes telles que celles que nous prsentent les grandes marques comme HP, Canon, ou Epson, ne seraient qu'illusions voyageant de-ci de-l dans le cerveau des ingnieurs anxieux de voir avancer la technologie. Avec un moteur courant continu, mme en envoyant une impulsion lectrique de dure trs prcise, il est impossible de raliser cette opration sans que des erreurs d'angle de rotation du rouleau n'aient lieu; cela est du au fait que le moteur DC possde une certaine inertie qui ne permet pas de prvoir quel angle de rotation serait engendr entre le dbut de l'impulsion et la fin de celle-ci .Tandis qu'avec un moteur pas pas, chaque impulsion de commande occasionne un dplacement dun seul pas, ce qui correspond un angle de rotation trs prcis Tout cela est bien beau mais comme toujours rien n'est parfait. Les moteurs pas pas ont un gros problme : leur circuit de commande est trs complexe. Il lest encore plus si on veut utiliser des composants discrets. Par contre, en utilisant des circuits intgrs, on arrive plus vite un rsultat satisfaisant. C'est dans ce but que nous ralisons ce projet. Notre vision consiste raliser une commande de moteur pas pas simple et facile utiliser. Dans une premire partie nous allons citer les diffrents types de moteurs pas pas, ensuite nous allons tudier la commande des moteurs pas pas par circuits intgrs spcialiss
Ralis par BEN TALEB Med ALI
page 2
2006/2007
Commande du moteur pas pas
par PC
INSAT-TUNILUX
Ralis par BEN TALEB Med ALI
page 3
2006/2007
Commande du moteur pas pas 1. INTRODUCTION :
par PC
INSAT-TUNILUX
Les premiers moteurs pas pas datent de 1930. Leur vritable dveloppement est li l'avnement de la micro-informatique (microprocesseur). Le moteur pas pas peut remplir deux fonctions : -Conversion d'nergie lectrique en nergie mcanique (cest le moteur classique) ; -Conversion dinformation numrique en un positionnement angulaire ou linaire .Le caractre synchrone du moteur pas pas permet de le faire fonctionner sans boucle de retour mais une meilleure fiabilit impose un contrle de la position, donc un asservissement. On le rencontre dans les robots miniatures, les imprimantes, les tables traantes, en automobile (commande de volets dair de conditionnement, de volets dair de carburation, de positionnement de rtroviseurs, etc..), dans les minuteries, lappareillage domestique, les jouets , etc.. 2. Fonctionnement des moteurs pas pas Ces moteurs comme tous les autres moteurs comportent un Rotor et un Stator. Le Rotor est aimant permanent, le Stator quant lui, est constitu dun certain nombre de bobines d'excitation .Le schma ci dessous est une reprsentation simpliste d'un moteur car le rotor comporte beaucoup plus d'un aimant, et le stator bien plus de 4 bobines. Plus le nombre d'aimants et de bobines augmente, plus grand sera le nombre de pas pour faire un tour et plus faible seront les vibrations .
Fig.1 : Moteur pas pas
Ralis par BEN TALEB Med ALI
page 4
2006/2007
Commande du moteur pas pas
par PC
INSAT-TUNILUX
Pour amener le rotor en position A, il va falloir alimenter les deux bobines 1et 3 .L'alimentation de ces deux bobines, va forcer l'aimant se bloquer au point A. Pour amener le rotor au point B, il suffit de transfrer l'alimentation sur les deux bobines 3 et 2 . Ces moteurs peuvent tourner dans un sens ou dans l'autre, il suffit de changer lordre d alimentation des bobines Nous trouverons dans le commerce ou base de rcupration, des moteurs possdant un nombre de pas diffrents les uns des autres. Mais ce nombre de pas est plus ou moins standardis. Suivant la prcision dsire dans le positionnement, tel ou tel moteur en fonction du nombre de pas qu'il dispose, sera mis en place. Voici un tableau des valeurs les plus utilises. Nombre de pas par tour 20 Rotation de l axe 18 degrs 24 48 100 200 15 degrs 7.5 degrs 3.6 degrs 1.8 degrs
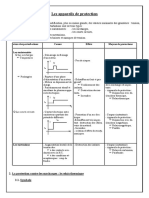
Le nombre de pas prsent sur un moteur est de toute faon un multiple de 4. Plus le moteur tourne vite plus le couple sera faible. 3. DIFFERENTS TYPES DE MOTEURS PAS A PAS : Il y a trois principaux types de moteurs pas pas : -Les moteurs reluctants (reluctants non polariss) encore appels VR stepping motors (Fig.2) -Les moteurs aimants permanents (reluctants polariss) appels PM stepping motors (Fig.3) -Les moteurs hybrides :(Fig.4) 3.1. Moteurs reluctants : Le rotor est en matriau magntique non polaris. Il dispose son priphrique dun nombre de dents diffrent de celui du stator. Une dent du rotor est attire par la dent la plus proche du stator, cest la loi du flux maximum ou de la rluctance minimale.
Ralis par BEN TALEB Med ALI
page 5
2006/2007
Commande du moteur pas pas
par PC
INSAT-TUNILUX
Fig.2 : Moteur pas pas reluctant 3.2. Moteurs aimant permanent: Le rotor comporte des ples nord et sud alterns. Selon l'alimentation des phases du stator et le sens du courant, le rotor se positionne tel qu'un ple nord rotor soit en face d'un ple sud stator.
Fig.3 : Moteur pas pas aimant permanent 3.3. Moteurs hybrides ou reluctants polariss: Ce moteur utilise les deux principes prcdents. Le rotor comporte en priphrie des dentures en matriau permable, polarises par aimant. La fonction moteur est obtenue par deux effets : - Effet de rluctance variable d aux dents - Proprit des aimants permanents. Pour une bonne comprhension de la suite, nous allons donner les dfinitions et terminologies suivantes
Ralis par BEN TALEB Med ALI
page 6
2006/2007
Commande du moteur pas pas
par PC
INSAT-TUNILUX
Fig.4 : Moteur hybride rluctant polaris Ecart, angle de puissance: angle de retard du rotor lorsqu'un couple est appliqu sur l'axe en degr. Couple de dtente: couple maximum sur le rotor, sans provoquer de rotation en N.m. Couple de maintien: couple maximum disponible sur l'axe, moteur excit, sans provoquer de rotation en N.m. Couple au dmarrage: couple maximum disponible lors du dmarrage une frquence donne, sans perdre de pas en N.m. Couple l'entranement: couple maximum disponible frquence donne, sans perdre de pas en N.m. Frquence maximale de dmarrage vide: frquence maximale des pas laquelle un moteur non charg peut tre entran sans perte de pas : pas/s. Frquence maximale de dmarrage en charge: frquence maximale des pas laquelle un moteur charg peut dmarrer sans perte de pas : pas/S. Frquence maximale d'entranement en charge: frquence maximale des pas laquelle un moteur charg peut tre entran sans perte de pas : pas/s. Zone de dmarrage: plage de frquence des pas dans laquelle un moteur peut dmarrer sans perte de pas. Zone d'entranement: plage de frquence des pas dans laquelle le moteur fonctionne en synchronisme parfait avec les impulsions de commande sans perte de pas. Dans cette zone, le moteur ne peut s'arrter instantanment sans perte de pas. Sur oscillation (dpassement): amplitude maximale de l'oscillation autour de la position de repos la fin d'une commande : en degr. Phase: enroulement compris entre deux fils. Pas: angle entre deux positions stables adjacentes de rotation de l'axe en degr.
Ralis par BEN TALEB Med ALI
page 7
2006/2007
Commande du moteur pas pas
par PC
INSAT-TUNILUX
3.4. Moteurs pas pas rluctance variable : Le couple nest pas fonction du signe du courant. En consquence, un nombre minimum de trois phases est indispensable pour assurer une rotation continue dans les deux sens. Les structures sont polyphases soit un circuit soit n circuits magntiques indpendants. On trouve donc : 3.4.1Moteur simple circuit :
3.4.2 Moteur trois circuits magntiques distincts :
Coupe A
Coupe B
Coupe C
3.5. Moteurs pas pas aimants permanents : 3.5.1. Principe de fonctionnement et dfinitions : Le principe de fonctionnement est indiqu sur la figure 5 ci-dessous. La flche situe dans le rotor reprsente l'aimant permanent. Deux bobines d'excitation (phases) sont positionnes 90et sont parcourues l'une aprs l'autre par un courant bidirectionnel. C'est un moteur deux phases et une seule paire de ples rotoriques. Le nombre de pas par tour est de quatre. On dfinit le sens de rotation par les termes horaire et Anti - horaire.
Ralis par BEN TALEB Med ALI page 8 2006/2007
Commande du moteur pas pas
par PC
INSAT-TUNILUX
Fig.5 : Principe de fonctionnement de moteur pas pas 3.5.2. Types d'alimentations des phases : On distingue deux types dalimentation des phases -Alimentation bipolaire : Le courant est de signe altern grce linterrupteur commutateur .Le principe dalimentation des phases est simple, on alimente dabord B1 avec un courant positif, le rotor tourne alors de 90 pour se positionner en position dquilibre en direction du flux maximal. Ensuite on alimente B2 par un courant positif galement, le rotor tourne de nouveau de 90. Alimentons maintenant B1 avec un courant ngatif, une fois encore le rotor fait un pas de 90. Enfin, alimentons B2 avec un courant ngatif, le rotor reprend sa position initiale. Ainsi nous avons effectu un cycle complet.
Fig.6 : Alimentation bipolaire
Ralis par BEN TALEB Med ALI
page 9
2006/2007
Commande du moteur pas pas
par PC
INSAT-TUNILUX
- Alimentation unipolaire Pour simplifier llectronique de commande ,on construit des moteurs pas pas alimentation unipolaire, constitus de deux bobinages point milieu ,soit quatre demi-phases, dont cinq fils sont sortis si les points milieux sont runis.
Fig.7 : Alimentation unipolaire Les commutateurs K1-2 et K3-4 permettent lalimentation des bobines en rgime impulsionnel individuel (tat 1 ou 0 ). Nous prenons, nouveau, un rotor bipolaire. Le principe nest pas beaucoup plus compliqu. Fermons K1-2 sur la position 1. Un courant positif circule dans la phase A. Le rotor tourne dun pas de 90 pour adopter une position dquilibre statique stable dans la direction du flux maximal. Fermons, ensuite, K 3-4 sur la position 3. Un courant positif circule dans la phase C provoquant une nouvelle rotation du rotor dun pas de 90. Fermons maintenant K 1-2 sur la position 2, un courant positif circule dans la phase B entranant le rotor dun autre pas de 90. Fermons, enfin, K-3-4 sur la position 4. Un courant positif circule dans la phase D positionnant le rotor sa position initiale. Ici aussi, nous avons effectu un tour complet. Ce systme de commande est plus intressant parce qu'il ne dpend pas de l'ordre d'alimentation des phases. Mais les performances sont nettement plus mdiocres en ce qui concerne le couple et la puissance pour un mme encombrement.
Ralis par BEN TALEB Med ALI
page 10
2006/2007
Commande du moteur pas pas
par PC
INSAT-TUNILUX
3.6. Moteurs pas pas hybrides : Ce sont des moteurs reluctants polariss. La figure ci-dessous reprsente les coupes axiales (Fig8.a) et pseudo transversale (Fig8.b) d'un moteur pas pas, 72 pas au tour et deux phases alimentation bipolaire.
Fig8.a : Coupe axiale
Fig8.b : coupe transversale
Les moteurs hybrides ou reluctants polariss sont haute rsolution. Le nombre de pas au tour est trs important. RTC fabrique un moteur dont le pas est 1,8 (figure 9). Quatre enroulements bobins en anneaux concentriques l'axe du moteur sont logs dans des coupelles ralisant quatre stators dents.
Fig.9 architecture de moteur pas pas Un rotor en fer massif non aimant comporte quatre couronnes dentes. Les dentures de ces couronnes ont l'une par rapport l'autre un dcalage angulaire qui, en fonction du nombre de dents, dtermine le pas. Un aimant permanent est
Ralis par BEN TALEB Med ALI page 11 2006/2007
Commande du moteur pas pas
par PC
INSAT-TUNILUX
situ entre les stators. Les coupelles du stator et les couronnes du rotor possdent le mme nombre de dents. Dans un encombrement restreint, on obtient d'une faon trs conomique des performances remarquables, notamment en ce qui concerne le couple, l'angle de pas et la prcision. 4. CARACTERISTIQUES DES MOTEURS PAS A PAS: 4.1. Comparaisons fondamentales Moteurs rluctance variable: - Grande vitesse de fonctionnement - Pas rduit donc bonne rsolution le nombre de pas peut tre compris entre 12 et 72 au tour. Moteurs aimants permanents : La comparaison est faite avec les moteur rluctance variable, tailles gales : - Couple plus lev, - Frquence de commutation plus faible, - Couple de maintien sans alimentation d'environ 10 % du coup statique, - Plus grande inertie donc meilleure stabilit, - Amortissement interne des oscillations plus important, - Nombre de pas compris entre 2 et 24 au tour. Moteurs hybrides : - Couples plus importants que les moteurs reluctants, - Frquences limites arrt-dmarrage plus leves que pour les moteurs aimants permanents, - Puissance utile plus importante, - Nombre de pas compris entre 24 et 400 au tour. 4.2. Caractristiques communes : Ce sont les caractristiques couple-frquence des pas (Fig.15). On dfinit le fonctionnement : - Charge fixe, - Frquence fixe.
Ralis par BEN TALEB Med ALI page 12 2006/2007
Commande du moteur pas pas
par PC
INSAT-TUNILUX
Fig.10 : Caractristiques couple frquence de pas Fonctionnement charge fixe : Pour une charge C : - Le moteur ne peut dmarrer sans perte de pas que si la frquence est infrieure D; - Aprs quoi il peut tre acclr jusqu' une frquence E ; - L'arrt sans perte de pas, lorsque le moteur est en zone d'entranement, doit s'effectuer en passant par la frquence D ; partir de l on peut effectuer soit une dclration progressive soit une suppression des impulsions. Fonctionnement frquence fixe : Pour une frquence donne : - Le moteur ne peut dmarrer sans perte de pas que si la charge est au plus gale H - Cette charge peut ensuite s'accrotre jusqu' I ; - L'arrt sans perte de pas ne doit se pratiquer que lorsque est revenu en H. Influence de l'inertie de la charge : L'tude prcdente considre linertie de la charge ngligeable devant l'inertie du rotor. Si l'inertie de lensemble moteur + charge augmente, il y a inflexion de la courbe de dmarrage et la frquence de dmarrage s'en trouve rduite. La frquence maximale de dmarrage diminue avec l'accroissement de l'inertie de la charge selon l'expression :
Fc = F0
Ralis par BEN TALEB Med ALI
Ir I +Ir
page 13
2006/2007
Commande du moteur pas pas
par PC
INSAT-TUNILUX
F0 : frquence de dmarrage vide ; Fc : frquence de dmarrage en charge ; Ir : inertie du moteur utilis ; I : inertie de la charge.
A vitesse constante, l'inertie n'intervient plus. Pour une frquence de dmarrage donne, la diffrence entre le couple de dmarrage et le couple d'entranement augmente avec l'inertie. 4.3. Comparaison entre les diffrents types des moteurs pas pas : Cette comparaison peut se rsumer selon l tableau suivant. Critre de comparaison Moteur PP Aiment permanent Couple de travail Elev Vitesse de fonctionnement Faible Pas excut Faible Inertie propre Elev Couple de maintien Non ngligeable Amortissement des oscillations Plus important 5. CONCLUSION On constate quil existe diffrents types de moteur pas pas . Le moteur pas pas hybride est un moteur puissant cependant le problme qui se prsente maintenant cest comment commander ce moteur autrement dit comment peuton faire varier le sens de rotation de moteur , l angle de rotation ,etc Ce problme peut tre facilement rsolu en utilisant des circuits intgrs spcialiss dans la commande des moteurs pas pas .Ces circuits sont nombreux dont on va choisir le plus efficace. Moteur PP Rluctance variable Faible Faible Elev Faible Ngligeable Moins important
Ralis par BEN TALEB Med ALI
page 14
2006/2007
Commande du moteur pas pas
par PC
INSAT-TUNILUX
Ralis par BEN TALEB Med ALI
page 15
2006/2007
Commande du moteur pas pas
par PC
INSAT-TUNILUX
1. INTRODUCTION La commande dun moteur pas pas est une opration trs complexe si on veut utiliser des circuits discrets :des transistors de puissance commands par des portes logiques avec un dispositif de limitation de courant ,mais elle devient assez simple si on a recours des circuits intgrs spcialiss dans la commande des moteurs pas pas, ces circuits ne ncessitent que quelques composants externes .Ils disposent de toutes les fonctions telles que le sens de rotation et la mise en haute impdance. Ces circuits sont assez nombreux .Dans un premier temps nous allons citer les diffrents modes de contrle, ensuite une tude approfondie des diffrents circuits intgrs est effectue afin de pouvoir slectionner le circuit intgr qui rpond finalement nos attentes. 2. MODES DE CONTROLE : Un moteur pas pas peut tre pilot de plusieurs faons, car il a tout simplement plusieurs enroulements indpendants 2.1:Mode full step Ce mode peut tre effectu par deux mthodes : " single coil" ou "tow coil". Les deux mthodes mnent un dplacement dun pas complet. En mode "full step - single coil", il n'y a qu'un seul enroulement parcouru par un courant. On avance dun pas en envoyant le courant d'un enroulement vers l'enroulement qui suit (ou prcde). Ce mode produit le mouvement le plus fluide (sans trop de vibration) et consomme le moins de courant. Il n'offre qu'un couple rduit .Malgr son aspect primitif, ce mode est le plus frquemment utilis car il maximise le couple de moteur, permet des rvolutions rapides et il compense le manque du couple moteur. De mme, en mode "full step Tow coil", lalimentation des enroulements seffectue par paires adjacentes, donc on avance dun pas en envoyant le courant vers le couple denroulement suivant ( prcdant ).Ce mode produit un mouvement plus vibratoire par rapport celui de "single coil", et la consommation du courant est plus importante puisquon alimente deux enroulements la fois.
Ralis par BEN TALEB Med ALI
page 16
2006/2007
Commande du moteur pas pas
par PC
INSAT-TUNILUX
Ce tableau dcrit brivement les squences de fonctionnement du rotor suivant les diffrentes possibilits dexcitations imposs par le mode full step . 2.2Mode half-step Le mode half step, ou demi-pas permet de multiplier par deux le nombre de pas quun moteur possde. Cest une sorte dmulation dont il faut immdiatement comprendre les limites : le moteur est ralis pour faire 200 pas, Excitation "Single-Coil" Excitation "Two-Coils"
Chaque bobine successive est alimente Chaque paire de bobines adjacentes est la suite de l'autre. alimente. Coil Coil Coil Coil Step 4 3 2 1 Step Coil Coil Coil Coil 4 3 2 1 on on off off
b.1 a.1 on off off off
b.2 off on a.2 off on off off
on off
b.3 off off on a.3 off off on off b.4 a.4 off off off on
on
on off off on
et jamais pour 400.
Ralis par BEN TALEB Med ALI
page 17
2006/2007
Step
Coil Coil Coil Coil 4 3 2 1 on off off off
Commande du moteur pas pas
par PC les bobines, ltat neutre (pas de INSAT-TUNILUX dans
On triche en crant un troisime tat
a.1
b.1 on
on
off
off
courant). On multiplie ainsi par deux les combinaisons possibles sur les enroulements, en mlangeant les pas des modes "single coil" et "two coils". De par la mme, on multiplie par deux le nombre de pas pour un mme moteur. A noter que les pas intermdiaires ne sont contrls (maintenus) que par un seul enroulement. On a donc que la moiti du couple Par ailleurs un moteur contrlant un demi-pas ne souffre pas de problmes de rsonance . Mme sil tourne trs vite, on ne tombe jamais sur un point de rsonance o le couple sannule. En pratique, un moteur de 400 pas avec un couple X cote bien plus cher quun moteur de 200 pas avec un couple X/2, donc on voit tout de suite que le mode demi-pas est assez intressant, pour les dplacements de prcision.
a.2
off
on
off
off
b.2 off
on
on
off
a.3
off
off
on
off
b.3 off
off
on
on
a.4
off
off
off
on
b.4 on
off
off
on
Le mode "two -coils" compense le manque de couple (1,4 fois plus grand qu'en single coil). Cependant le moteur travaille "entre deux" bobines, et l'incertitude sur la position augmente.
3. COMMANDE PAR CIRCUITS INTEGRES 3.1. Commande par SAA1027
Ralis par BEN TALEB Med ALI
page 18
2006/2007
Commande du moteur pas pas
par PC
INSAT-TUNILUX
Le SAA1027 est un circuit intgr en technique bipolaire ,qui ralise une commande directe ,simple et fiable des moteurs pas pas bipolaires 4 phases sans tage de puissance ni niveau de compensation .Il comporte un compteur 4 tats bidirectionnels et un dcodeur pour commander les 4 sorties. Il est particulirement destin aux applications o le moteur fonctionne uniquement au dmarrage et dans un milieu parasite .L architecture interne de SAA1027 est donne par la figure ci-dessous :
Fig. 1 : Architecture interne de SAA1027 Le circuit comprend un tage dentre, un tage logique et un tage puissance Etage dentre : Se compose des trois tages suivants :
un tage recevant et mettant en forme les impulsions de commande du moteur un tage permettant de dfinir par simple application dun niveau le sens de rotation
Ralis par BEN TALEB Med ALI page 19 2006/2007
Commande du moteur pas pas
par PC
INSAT-TUNILUX
un tage de positionnement du compteur avant toute application dimpulsions. Etage logique : Compos dun compteur en anneau pilot par les impulsions d entre et commutant les diffrents tages de sortie selon une squence adquate Etage de puissance : Compose de 4 tages de puissance dlivrant chacun 350 mA .La protection de cet amplificateur de puissance est assure par des diodes intgres Caractristiques lectriques Gamme de voltage Courant de provision Voltage d entre HAUT BAS Courants d entre bas Courant de sortie bas Temprature ambiante de fonctionnement Avantages : directement Hautes immunit contre les bruits Rinitialisation facile Haut courant de la production Une temprature de fonctionnement pouvant atteindre 85 C Simple utiliser Contient le circuit de puissance , le moteur pas pas est cbl VCC ICC VIH VIL 9.5 18 V typ. min. max. 4.5 mA 7.5 V 4.5 V
IIL typ. 30 A IOL max. 500 mA Tamb De -20 +70 C
Inconvnients : Il ne peut pas conduire un trs grand nombre de moteurs Brochage :
Ralis par BEN TALEB Med ALI page 20 2006/2007
Commande du moteur pas pas
par PC
INSAT-TUNILUX
Le SAA1027 comporte 16 broches
Fig.2 : Le circuit SAA1027 Lorsque lentre C passe au niveau H , les sorties prennent les tats Q1=L ,Q2=H ,Q3=L , Q4=H correspondant la position 0 de l application . Si l entre R nest pas utilise, la connecter VCC niveau H .Si l entre M nest pas utilise la connecter : -VCC niveau H pour un sens de rotation Anti horaire -La masse niveau L pour un sens de rotation horaire Application typique ( branchement)
Ralis par BEN TALEB Med ALI
page 21
2006/2007
Commande du moteur pas pas
par PC
INSAT-TUNILUX
Fig.3 : Application typique utilisant le circuit SAA1027 Remarque Si le circuit intgr et le moteur sont connects la mme alimentation il est ncessaire de faire le branchement ci-dessus dans le but de protger la partie logique du systme des parasites pouvant tre engendrs .La commutation des courants dans le bobinage, les rsistances et la capacit doivent tre proches le plus possible des broches de SAA1027 Squences : Les squences permettant de raliser la commande sont dcrites dans le tableau Suivant : M=L(sens horaire) M=H sens antihoraire Squence Q1 Q2 Q3 Q4 Q1 Q2 Q3 Q4 compteur 0 L H L H L H L H 1 H L L H L H H L 2 H L H L H L H L 3 L H H L H L L H 0 L H L H L H L H
Ralis par BEN TALEB Med ALI
page 22
2006/2007
Commande du moteur pas pas
par PC
INSAT-TUNILUX
Chronogrammes :
sens horaire
sens anti-horaire
Fig.4 : Chronogrammes de la commande de moteur pas pas 3.2 Commande par L 297 et L298 : 3.3.1 Le circuit L297 :
Ralis par BEN TALEB Med ALI
page 23
2006/2007
Commande du moteur pas pas
par PC
INSAT-TUNILUX
Le L297 permet lexcitation de deux phase actives . Ce circuit contient des hacheurs modulation de largeur dimpulsion destin rgler le courant dans l tage de puissance.
Fig.5 : Circuit L297
Le L297 simplifie la commande du moteur pas pas .Ce circuit est compos d un bloc appel translateur command par deux entres logiques : le sens de rotation (CW/ CW ) et le mode fonctionnement en demi pas ou en pas normal (HALF/FULL). Une troisime broche est l entre CLK qui permet lavance d un pas . Le translateur contient un compteur 3 bits et quelques circuits logiques qui permettent de gnrer une squence basique 8 pas (Fig24) Avantages
Ralis par BEN TALEB Med ALI
page 24
2006/2007
Commande du moteur pas pas
par PC
INSAT-TUNILUX
Lavantage de lutilisation de circuit intgr L 297 est quil permet la commande de moteur pas pas dans deux sens de rotation. Il est simple, robuste, et tout est intgr: half/full step, rglage intensit par PWM, etc.. Il se branche directement sur un pont en H, exemple L298 Ce circuit intgr peut tre facilement command par ordinateur c est dire que les signaux de commande peuvent tre fournie par un logiciel de commande en utilisant les port ,srie et parallle dun PC Retour la position 0 en la signalant Limitation de courant moteur et rgulation dans les enroulements du moteur Entre de validation Grande fiabilit Inconvnients Linconvnient est quil ncessite une carte de puissance fournie par lutilisateur On a besoin dautres circuits intgrs pour raliser une bonne commande de moteur pas pas
Ralis par BEN TALEB Med ALI
page 25
2006/2007
Commande du moteur pas pas
par PC
INSAT-TUNILUX
Fig.6 : Squence basique
3.2.2 Le circuit L298 Le brochage de L298 est le suivant
Fig.7 : Circuit L298 Le L298 a 20 broches. Il se compose de deux tages de puissance configurs en pont et commands par deux entres logiques (A,B et C, D) ainsi que deux
Ralis par BEN TALEB Med ALI page 26 2006/2007
Commande du moteur pas pas
par PC
INSAT-TUNILUX
entres de validation respectivement INH1 et INH2 . Il possde deux entres dalimentation lune pour le moteur et lautre pour la logique interne il est command par des signaux logiques compatibles TTL qui peuvent mme exciter une charge inductive .Deux entres de validation peuvent bloquer la commutation. Les metteurs de chaque transistor sont connects les uns aux autres pour formuler les signaux SENS 1 et SENS 2
Fig.8 : Architecture interne de L298 Il prsente les avantages et inconvnients suivant : Avantages : Gamme de voltage jusqu 46 V Courant totale jusqu 4 A Bas voltage de saturation Protection sre de la temprature Voltage de lentre logique jusqu 1.5 V Haute immunit contre les bruits Commande de moteur pas pas dans deux sens de rotation Gamme de temprature ambiante trs acceptable (-40 130 C)
Inconvnients : Il ncessite une carte de puissance fournie par lutilisateur On a besoin dautre circuit intgr pour raliser une bonne commande de moteur pas pas donc on a besoin d une grande carte pour implanter les composants
Ralis par BEN TALEB Med ALI
page 27
2006/2007
Commande du moteur pas pas
par PC
INSAT-TUNILUX
Le L298 comporte des portes logiques et des transistors bipolaires comme dcrit dans la figure 25
Fig.9 : Chronogrammes de courants de L298
Pour commande un moteur pas pas on a besoin de deux circuits intgrs spcialiss qui sont le L297 et le L298 qui prsentent les avantages suivants
Cela ne ncessite que 2 pattes par moteur: Clock + sens, Il n'y aucun calcul de l'tat des moteurs et des commandes appliquer On envoie juste une impulsion pour avancer/reculer d'un pas. D'o pas de mise au point soft, ni puissance de calcul gaspille (ce qui est gnant dans des fonctions d'interruption). Il existe plein de circuits intgrs ddis au moteur pas- -pas. C'est simple et sans soucis. On a choisi le L297. Il est simple, robuste, et tout est intgr: half/full step, rglage intensit par PWM, etc. Il se branche directement sur un pont en H, pour cela on a utilis le circuit L298) Finalement, la carte est simple et modulaire. Il est facile de la changer, la mettre au point, la rutiliser...
Par contre, les cartes trouves dans les revues peuvent convenir, mais elles se branchent souvent sur un port parallle de PC.
Ralis par BEN TALEB Med ALI
page 28
2006/2007
Commande du moteur pas pas
par PC
INSAT-TUNILUX
Fig.10 : Principe de la commande par L297 etL298
Mise en oeuvre logicielle L'utilisation des moteurs pas - -pas est extrmement simple. Pour les tester, on avait juste branch la CLK un gnrateur d'impulsions BF. En changeant la frquence, on contrlait la vitesse du moteur.. Par soft, c'est aussi simple, il y a une fonction pour imposer le sens, et une autre appeler, chaque fois que l'on veut avancer d'un pas. Cette fonction gnre une impulsion sur une patte dont l'adresse correspond au moteur. 3 .3Commande par UCN5804B Le Microsystems UCN5804 Allgro est simple utiliser et intgrer. Combinant la logique CMOS de bas pouvoir avec haut courant et productions bipolaires de haut voltage, l'UCN5804B et UCN5804LB BiMOS traducteur II les conducteurs fournissent le contrle complet et conduisent un moteur pas pas quatre phases avec production continue de courants 1.25 A par phase
Ralis par BEN TALEB Med ALI page 29 2006/2007
Commande du moteur pas pas
par PC
INSAT-TUNILUX
La logique CMOS fournit le classement logique, DIRECTION et PRODUCTION permettant le contrle, et un pouvoir sur la fonction rinitialiser. Les entres sont compatibles avec CMOS standard, PMOS, circuits NMOS et TTL ou LSTTL peuvent exiger que l'usage de rsistances de la traction appropries assure une entre logique haut adquate. Le format de la vague - promenade consiste stimuler une phase du moteur dans la fois UN B - C - D (ou D - C - B UN) .Ce mode dexcitation consomme un courant faible et assure l'exactitude de position sans se soucier de tout dsquilibre sinueux dans le moteur. La promenade biphas stimule deux phases adjacentes dans chaque dent plac (AB avant Jsus-Christ CD DA).Ce mode de squence offre un produit de moment de rotation par la vitesse amlior ,un plus grand moment de rotation du dent, et est moins susceptible la rsonance du moteur. Les transistors bipolaires sont capables de supporter 50 V dans l tat FERM (soutenir des voltages jusqu' 35 V). Grounds - Clamp et diodes du flyback fournissent la protection contre voyageur
par induction. L'ensemble de circuits de la protection thermique met hors fonction les productions quand la temprature de l'clat est excessive. Les deux appareils sont estims pour opration sur la gamme de la temprature de -20C +85C. L'UCN5804B est fourni dans une 16 pingles Le UCN5804B possde 16 broches comme dcrit dans la figure 28
Ralis par BEN TALEB Med ALI
page 30
2006/2007
Commande du moteur pas pas
par PC
INSAT-TUNILUX
Fig.11 ; Brochage de UCN5804B La commande par UCN5804B possde les avantages et inconvnients suivants : Avantages +85C Inconvnients Il ne peut pas raliser un commande idale On a besoin dajouter des diodes pour le circuit de puissance Simple utiliser Immunit contre les bruits Fonctionnement dans une gamme de temprature de 25 Comporte un circuit de puissance intgr
Le schma de principe de fonctionnement de UCN5804B est donn par la figure ci-dessous
Ralis par BEN TALEB Med ALI
page 31
2006/2007
Commande du moteur pas pas
par PC
INSAT-TUNILUX
Fig.12 : Le schma de principe de fonctionnement de UCN5804B 3.4 Commande par 74LS 194 Le circuit 47LS194 est un registre dcalage 8 bits bidirectionnel, il comporte 16 broches
Ralis par BEN TALEB Med ALI
page 32
2006/2007
Commande du moteur pas pas
par PC
INSAT-TUNILUX
Brochage de 74LS194 Caractristiques Vil : max. 0.8V Vol : max. 0.5V Iil : Max 20A Avantages Une immunit contre le bruit Raliser un bonne commande des moteurs pas pas Simplicit de commande par PC Simple utiliser Inconvnients Ncessite dautres circuits intgrs pour fonctionner Gamme de temprature faible temps de propagation typique 9.5 ms puissance totale 75 mW
Schma de principe
Ralis par BEN TALEB Med ALI page 33 2006/2007
Commande du moteur pas pas
par PC
INSAT-TUNILUX
Fig.13 : Schma de principe de commande par 74LS194 4. CHOIX DU CIRCUIT INTEGRE : En tenant compte de la disponibilit des circuits cits avant on remarque que les circuits L297 et L298 sont les plus avantags tre slectionns. En plus ils sont les circuits les plus conomiques. 5. CONCLUSION Il est maintenant bien clair que la commande des moteurs pas pas peut tre assiste soit par le mode full step : (pas complet) soit par le mode half step: (demi-pas) . Dautre part, on a dcouvert dans ce chapitre des diffrents circuits intgrs spcialiss a la commande des moteirs pas pas et on a fix notre choix sur les circuits L297 et L298. Ces circuits assurent la commande des moteurs partir donnes quils reoivent sous la forme des impulsions. Ces dernires peuvent tre gnres, soit manuellement, soit par ordinateur par lintermdiaire dun microcontrleur PIC qui sera tudi au cours du chapitre suivant.
Ralis par BEN TALEB Med ALI
page 34
2006/2007
Commande du moteur pas pas
par PC
INSAT-TUNILUX
Ralis par BEN TALEB Med ALI
page 35
2006/2007
Commande du moteur pas pas
par PC
INSAT-TUNILUX
1. INTRODUCTION Dans ce chapitre on va aborder un lment assez important dans notre projet cest le microcontrleur PIC. Ce dernier existe en plusieurs familles quon va tudi globalement. Ensuite on sintressera ltude clarifie du modle convenable nos attentes. 2. LES MICROCONTROLEURS PIC : Aujourdhui, les PICs sont devenus des vritables rfrences dans le monde des microcontrleurs grce leur cot particulirement bas et leurs performances remarquables : Leur jeu dinstruction rduit RISC, et leur architecture interne de type HARVARD. 2.1. Les diffrentes familles de PIC : Aujourdhui, il existe 5 grandes familles de microcontrleurs PIC qui se rpartissent comme suit : - La famille 12Cxxx est dintroduction sur le march relativement rcente. Elle est constitue de circuits contenus en botiers 8 pattes. Elle rencontre actuellement un trs grand succs car leur petite taille et leur faible cot la destine aux plus petites applications base de microcontrleurs. - La famille 16Cxxx, de composants plus performants qui ne sont pas plus coteux. Mais, la programmation des circuits de cette famille est relativement complexe. - La famille la plus connue lheure actuelle est la famille 16Fxxx, qualifie initialement par MICROCHIP de famille Mid-Range, ce que lon peut traduire par milieu de gamme . Cest elle qui se dveloppe le plus rapidement. Ces circuits reprennent videmment les concepts qui ont fait le succs de la famille 16Cxxx. Ils utilisent la mme architecture et le mme jeu dinstruction de base mais disposent de ressources internes plus nombreuses avec, par exemple, des
Ralis par BEN TALEB Med ALI
page 36
2006/2007
Commande du moteur pas pas
par PC
INSAT-TUNILUX
ports sries varis, des ports parallles plus nombreux, ou bien encore des convertisseurs analogiques/numriques. - Enfin, deux autres familles doivent tre signaliss les circuits 17Cxxx et 18Cxxx qui sont actuellement les plus gros microcontrleurs de MICROCHIP. 2.2. Identification dun PIC Une rfrence des microcontrleurs MICROCHIP est de la forme NNLLLXXX ou : NN: dsigne la famille laquelle appartient le circuit et peut donc valoir: 12, 16, 17 ou 18.
LLL : est un ensemble dune, deux ou trois lettres qui indique le type de mmoire de programme contenue dans le circuit et si sa tension dalimentation normale ou tendue. - C qui nous indiquera que la mmoire programme est une EPROM ou une EEPROM. -CR qui nous indiquera une mmoire de type ROM. - F qui nous indiquera une mmoire de type FLASH. XXX : est un ensemble de deux ou trois chiffres constituant la rfrence du circuit dans la famille et permettant de savoir de quelle ressources internes on dispose. 2.3. Tensions dalimentation Les microcontrleurs PIC salimentent bien videmment sous une tension comprise dans la plage dalimentation normalise des circuits TTL, soit 4.75 5.25V, mais il existe diffrentes versions de circuits avec des plages de tension dalimentation diffrentes rsumes dans Le tableau II.2.
Ralis par BEN TALEB Med ALI
page 37
2006/2007
Commande du moteur pas pas
par PC
INSAT-TUNILUX
Tableau II.2: Les diffrentes plages de tensions dalimentation et leurs lettres codes en fonction du type de mmoire de programme. FLASH F 4.5 6V LF 2 6V EPROM ROM Gamme de Standard C 4.5 CR 4.5 tension Etendue 6V LC 2.5 6V 6V LCR 2.5 6V
2.4. Structure interne Selon le type de PIC utilis, on retrouvera en interne un certain nombre de registres et priphriques possdant des caractristiques diffrentes. La structure dun PIC est constitue des lments suivants : - Une mmoire de programme : Contient le code binaire correspondant aux instructions que doit excuter le microcontrleur. - Une mmoire RAM : Permet de sauvegarder temporairement les informations. - Une unit centrale CPU : Dans cette unit nous retrouvons lunit arithmtique et logique UAL charge deffectuer toutes les oprations arithmtiques de base addition, soustraction, ainsi que les oprations logiques ET, OU, - Des modules internes savoir : Les Timers Les interruptions Un convertisseur analogique/numrique (CAN) Un module de communication srie synchrone Un module de communication en port parallle Un chien de garde
Ralis par BEN TALEB Med ALI
page 38
2006/2007
Commande du moteur pas pas
par PC
INSAT-TUNILUX
3. LE MICROCONTROLEUR PIC 16F877 Durant nos recherches bibliographiques sur les PICs, on a constat que seul le PIC 16F877 satisfait nos besoins : figure II.1.
Fig.1: Schma rel du 16F877 Les spcifications techniques du microcontrleur PIC16F877 sont rsumes dans le tableau II.3. Tableau II.3 : Rsum des spcifications techniques du PIC16F877 Frquence Nombre d'Entres/Sorties Type mmoire de programme Taille mmoire de programme Mmoire de donnes RAM CAN Timers 1-20 MHz 33 Flash 8 Kmots (1mot = 14 bits) 256 bits 368 bits Jusqu' 8 entres analogiques avec rsolution de 10 bits 1 de 16 bits 2 de 8 bits 1 chien de garde (Watch dog)
Ralis par BEN TALEB Med ALI
page 39
2006/2007
Commande du moteur pas pas
par PC
INSAT-TUNILUX
3.1. Mmoire du 16F877 Lorganisation de la mmoire de donnes des PIC est un peu particulire car elle est divise en trois parties distinctes : FLASH, RAM et EEPROM 3.1.1. Mmoire FLASH (8K) Cest la mmoire programme proprement dite, chaque case mmoire unitaire fait 13 bits. La mmoire FLASH est un type de mmoire stable, rinscriptible volont, elle fait le succs des PICs.
3.1.2. Mmoire RAM (368 octets) Cest la mmoire accs rapide, mais elle sefface ds quelle est mise hors tension. La RAM contient les registres de configuration du PIC ainsi que les diffrents registres de donnes et les variables utilises par le programme. 3.1.3. EEPROM interne (256 octets) La mmoire EEPROM est constitue de 256 octets quon peut lire ou crire depuis un programme. Ces octets sont conservs aprs une coupure de courant et sont trs utiles pour conserver des paramtres semi permanents. Laccs ce type de mmoire est plus lent et son utilisation implique une procdure spciale. 3.2. Entres / sorties Le PIC 16F877 possde 13 lignes dentres/sorties rparties en 5 ports nots A, B, C, D et E. Ces ports permettent de dialoguer avec lextrieure. Chaque port est configur par un registre de port, nomm TRIS dans le datasheet, suivi de la lettre du port
Ralis par BEN TALEB Med ALI
page 40
2006/2007
Commande du moteur pas pas
par PC
INSAT-TUNILUX
3.3. TIMERS / Compteurs Le grand intrt des modules de comptage, est quils permettent de tenir compte des vnements qui surviennent de faon rpte sans que le microcontrleur soit monopolis par cette tche. Le 16F877 dispose de 3 modules de temporisation Le TIMER 0 : cest un compteur 8 bits qui peut compter de 0 255 Le TIMER 1 : cest un compteur 16 bits qui peut compter de 0 65535 Le TIMER 2 : cest un compteur sur 8 bits. 3.4. Convertisseur analogique/numrique (CAN) Le CAN prsent dans le 16F877 est un CAN 10bits. Ce CAN peut convertit les tensions analogiques de 8 voies disponibles sur ce microcontrleur en une valeur numrique binaire. Sa rsolution de 10bits donne une prcision en 5V de 5mv environ, ce qui est une prcision tout a fait intressante pour la plupart des besoins de lutilisateur. 3.5. Broches du PIC 16F877 Comme pour tout circuit intgr, chacune de ses broches a une ou plusieurs fonctions qui sont rsumes par un sigle mnmotechnique. La description complte prsente par la figure II.2.
Fig.2: Reprsentation simplifie des broches du 16F877 Ralis par BEN TALEB Med ALI page 41 2006/2007
Commande du moteur pas pas
par PC
INSAT-TUNILUX
Les broches de fonctionnement sont les broches qui permettent au microprocesseur de fonctionner. Ces broches doivent obligatoirement tre connectes pour que le 16F877 fonctionne, do leur nom. 3.5.1. Broches dalimentation Ce microcontrleur contient 2 broches pour le 0V not Vss et 2 broches pour le +5V not Vdd. Il suffit de connecter une de chaque lalimentation pour que le 16F877 fonctionne. 3.5.2. Broches du Quartz Ensuite, comme pour tout microprocesseur, le 16F877 va se baser sur une frquence typiquement de lordre de 4 Mhz pour son fonctionnement interne. Ce quartz est connect sur les 2 broches OSC1 et OSC2. 3.5.3. Broche de rinitialisation Une broche particulire du microprocesseur est la broche /MCLR (Master Clear). Cette broche est davantage une broche de contrle que de fonctionnement. Cette broche a pour effet de provoquer la rinitialisation du microprocesseur lorsquelle est connecte 0V. Ceci provoque larrt du programme qui va recommencer la premire instruction, lensemble des registres du microprocesseur va par ailleurs tre galement remis leur valeur de dmarrage. 3.6. Interruptions Diffrentes interruptions sont disponibles avec le PIC16F877. Les plus importantes sont : - Interruption externe sur PB0 ; - interruption du port parallle ; - interruption du port srie (rception et mission) ; - interruption du module CCP1 ; - interruption du Timer ;
- interruption de fin de conversion du module CAN ; Ralis par BEN TALEB Med ALI page 42 2006/2007
Commande du moteur pas pas
par PC
INSAT-TUNILUX
4. Conclusion : On peut maintenant considrer que nos recherches et nos tudes thoriques sont assez suffisantes pour aborder la partie pratique de notre projet. En effet, on a pu bien enrichir nos connaissances sur les moteurs pas pas, les circuits intgrs spcialiss leur commande et, videmment, le microcontrleur PIC qui va assurer le lien entre la partie logicielle et la partie matrielle. Donc il ne nous reste qu disposer la solution adopte qui est une carte lectronique base de PIC 16F877 en plus des circuits spcialises la commande du moteur (L297 et L298 ), ainsi que la partie logicielle qui va tre la partie commande de notre projet.
Ralis par BEN TALEB Med ALI
page 43
2006/2007
Commande du moteur pas pas
par PC
INSAT-TUNILUX
Ralis par BEN TALEB Med ALI
page 44
2006/2007
Commande du moteur pas pas
par PC
INSAT-TUNILUX
I. INTRODUCTION La ralisation pratique de ce projet comporte deux parties : une partie lectronique (le circuit de commande) et une partie informatique (la programmation du PIC et de linterface de commande).
Ralis par BEN TALEB Med ALI
page 45
2006/2007
Commande du moteur pas pas
par PC
INSAT-TUNILUX
Ralis par BEN TALEB Med ALI
page 46
2006/2007
Anda mungkin juga menyukai
- TD HacheursDokumen7 halamanTD HacheursBouchekouf OussamaBelum ada peringkat
- Cho7294 PDFDokumen137 halamanCho7294 PDFHoucine HoucineBelum ada peringkat
- Rappel AppareillageDokumen23 halamanRappel AppareillageAnonymous A13Lxz2hTBelum ada peringkat
- Cours Schémas Et Appareillages Electriques - L3 ELM ELT - 2016 2017 - A. LAIFAOUIDokumen114 halamanCours Schémas Et Appareillages Electriques - L3 ELM ELT - 2016 2017 - A. LAIFAOUIAnas SawalhaBelum ada peringkat
- Extrait Norme 18-510 Zone Et EquipementsDokumen3 halamanExtrait Norme 18-510 Zone Et Equipementsmdamien5880Belum ada peringkat
- Série D'exercices - Sciences Physiques - Oscillations Électriques Forcées - Bac Informatique (2014-2015) MR Daghsni SahbiDokumen4 halamanSérie D'exercices - Sciences Physiques - Oscillations Électriques Forcées - Bac Informatique (2014-2015) MR Daghsni SahbiMahmoud Essahbi Sahbi Daghsni50% (2)
- DibeDokumen117 halamanDibeمفتاح الدينBelum ada peringkat
- FC BZG FR PDFDokumen38 halamanFC BZG FR PDFhakou abdessemedBelum ada peringkat
- PDF ABC Accessoires Reseaux TorsadesDokumen6 halamanPDF ABC Accessoires Reseaux TorsadesKhodor AkoumBelum ada peringkat
- Exercices Sur Les Transistors BipolairesDokumen2 halamanExercices Sur Les Transistors Bipolairesabdessamad ourahma100% (3)
- Cahier Electro Chapitre 12Dokumen10 halamanCahier Electro Chapitre 12echaffaoui ahmedBelum ada peringkat
- Distillerie Industrielle I-Presentation Du Systeme:: Lycée Imam Moslem El Menzah Devoir de Synthese N°3 Le 11/05/2017Dokumen7 halamanDistillerie Industrielle I-Presentation Du Systeme:: Lycée Imam Moslem El Menzah Devoir de Synthese N°3 Le 11/05/2017Amira JebaliBelum ada peringkat
- Sba-120 (120058a)Dokumen4 halamanSba-120 (120058a)VICTORSJBelum ada peringkat
- Appareils de ProtectionDokumen34 halamanAppareils de Protectionkamal100% (1)
- 1 - Les Grands Principes Du RayonnementDokumen45 halaman1 - Les Grands Principes Du RayonnementmdmwaelBelum ada peringkat
- BipBop Program Catalog 2014Dokumen40 halamanBipBop Program Catalog 2014Jagdish RajanBelum ada peringkat
- GRAFCET Et Equations-CorrigeDokumen14 halamanGRAFCET Et Equations-Corrigea.ghani BaRaCuDa100% (1)
- Poste TransfoDokumen13 halamanPoste TransfoMaxence KouessiBelum ada peringkat
- Compensation de Puissance RéactiveDokumen7 halamanCompensation de Puissance RéactiveMohammed El MonadyBelum ada peringkat
- Catalogue AccessoiresDokumen80 halamanCatalogue AccessoiresKhelifa RadiaBelum ada peringkat
- TD Exos ELAN 2020Dokumen12 halamanTD Exos ELAN 2020Phú KhổngBelum ada peringkat
- 1-Rappel de Quelques Notions Sur Les Schémas ÉlectriquesDokumen59 halaman1-Rappel de Quelques Notions Sur Les Schémas ÉlectriquesfellahiBelum ada peringkat
- Oxydoréduction Cours Et Exercices Corrigés - F2SchoolDokumen1 halamanOxydoréduction Cours Et Exercices Corrigés - F2Schooldiouffallou471Belum ada peringkat
- Sujet Examen L3 504 2015 01 20Dokumen8 halamanSujet Examen L3 504 2015 01 20Ced'RasoloarivonyBelum ada peringkat
- Bobine À Noyau de Fer en Régime VariableDokumen18 halamanBobine À Noyau de Fer en Régime VariableLyes100% (2)
- 1 - MVT de Particule 2022Dokumen13 halaman1 - MVT de Particule 2022Nisrine MarmourBelum ada peringkat
- Technologie Des RésistancesDokumen8 halamanTechnologie Des RésistancesMouna Ben SmidaBelum ada peringkat
- Support Cours S3 M1 2017 V1Dokumen82 halamanSupport Cours S3 M1 2017 V1trrtrt100% (1)
- Exemple Ecodial PDFDokumen2 halamanExemple Ecodial PDFJackieBelum ada peringkat
- Annexe 3 2 À 3 7 PDFDokumen11 halamanAnnexe 3 2 À 3 7 PDFfatimaBelum ada peringkat