Anda mungkin juga menyukai
- The Influence of Gravity On The Performance of Planing Vessels in Calm WaterDokumen17 halamanThe Influence of Gravity On The Performance of Planing Vessels in Calm WaternaufragatoBelum ada peringkat
- Simulation of The Dam Break Problem and Impact Flows Using A Navier-Stokes SolverDokumen4 halamanSimulation of The Dam Break Problem and Impact Flows Using A Navier-Stokes Solverclimax1364Belum ada peringkat
- Kintea2016 PDFDokumen19 halamanKintea2016 PDFJuan Manuel ScarpettaBelum ada peringkat
- Wave Breaking in Tuned Liquid DampersDokumen9 halamanWave Breaking in Tuned Liquid Dampers조기현Belum ada peringkat
- Experimental and Numerical Analyses of Sloshing Flows: Yonghwan KimDokumen20 halamanExperimental and Numerical Analyses of Sloshing Flows: Yonghwan KimloemannBelum ada peringkat
- Initial Water Impact of A Wedge at Vertical and Oblique AnglesDokumen25 halamanInitial Water Impact of A Wedge at Vertical and Oblique AnglesScott WeidleBelum ada peringkat
- Hydrodynamic Analysis of Non-Planing and Planing Hulls by BEMDokumen12 halamanHydrodynamic Analysis of Non-Planing and Planing Hulls by BEMhaujesBelum ada peringkat
- Numerical Investigation On Seakeeping Performance of SWATH With Three Dimensional Translating-Pulsating Source Green Function (Sun-Yao-Ye)Dokumen11 halamanNumerical Investigation On Seakeeping Performance of SWATH With Three Dimensional Translating-Pulsating Source Green Function (Sun-Yao-Ye)naufragatoBelum ada peringkat
- Catamaran Wetdeck Slamming Loads Using CFDDokumen6 halamanCatamaran Wetdeck Slamming Loads Using CFDAhmadA.SwidanBelum ada peringkat
- Estimation of Hull Girder Vertical Bending Moments Including Non Linear and RDokumen14 halamanEstimation of Hull Girder Vertical Bending Moments Including Non Linear and RalfavectorBelum ada peringkat
- Hydrodynamic Impact Numerical and Experimental InvestigationsDokumen27 halamanHydrodynamic Impact Numerical and Experimental InvestigationsAdam LewisBelum ada peringkat
- A Nonlinear Mathematical Model For Coupled Heave, Pitch and Roll Motions of A High-Speed Planing HullDokumen38 halamanA Nonlinear Mathematical Model For Coupled Heave, Pitch and Roll Motions of A High-Speed Planing HullДмитрий КирзуновBelum ada peringkat
- Sloshing Article Final VersionDokumen7 halamanSloshing Article Final VersionDanielGuimarãesCostaBelum ada peringkat
- Computations For Large-Amplitude Two-Dimensional Body MotionsDokumen13 halamanComputations For Large-Amplitude Two-Dimensional Body Motions张杰Belum ada peringkat
- Numerical Simulation For Droplets Formation Due To Breaking WaveDokumen22 halamanNumerical Simulation For Droplets Formation Due To Breaking WaveTung DangBelum ada peringkat
- 24 SHAO Incompressible SPH Simulation of Water Entry ofDokumen25 halaman24 SHAO Incompressible SPH Simulation of Water Entry ofAnonymous HijNGQtNBelum ada peringkat
- Finite-Volume Method Simulates Free-Surface FlowsDokumen8 halamanFinite-Volume Method Simulates Free-Surface FlowsSandra PowersBelum ada peringkat
- Investigation of The Effect of Bulbous Bow - Paper For NOAMI - 15.01.2014Dokumen16 halamanInvestigation of The Effect of Bulbous Bow - Paper For NOAMI - 15.01.2014mtarequeali5836Belum ada peringkat
- Hermundstad.efficient Method.2009.TRANS 암호화 해제Dokumen26 halamanHermundstad.efficient Method.2009.TRANS 암호화 해제Shafiqul Islam SumonBelum ada peringkat
- Systematic Model Experiments on Flooding of Two Ro-Ro VesselsDokumen18 halamanSystematic Model Experiments on Flooding of Two Ro-Ro Vesselsselvithimmarajan@gmail.comBelum ada peringkat
- Model Aliran GranularDokumen11 halamanModel Aliran GranularAndi Andragastomatakidi OdeasedherundeBelum ada peringkat
- Water: Numerical Analysis of Drag Force Acting On 2D Cylinder Immersed in Accelerated FlowDokumen24 halamanWater: Numerical Analysis of Drag Force Acting On 2D Cylinder Immersed in Accelerated FlowRishbha SapkotaBelum ada peringkat
- Finite Element Simulation of Water Circulation in The North SeaDokumen7 halamanFinite Element Simulation of Water Circulation in The North SeachrissbansBelum ada peringkat
- Efficient Methods For Direct Calculation of Slamming Loads On ShipsDokumen21 halamanEfficient Methods For Direct Calculation of Slamming Loads On ShipsSahil JawaBelum ada peringkat
- A Combined Method To Predict Impact Pressure On Planing CraftDokumen12 halamanA Combined Method To Predict Impact Pressure On Planing CraftДмитрий КирзуновBelum ada peringkat
- A Level Set Immersed Boundary Method for Water Entry and ExitDokumen24 halamanA Level Set Immersed Boundary Method for Water Entry and ExitJosef CamilleriBelum ada peringkat
- 1979-C.L。Kirk and E.UDokumen11 halaman1979-C.L。Kirk and E.UShuai MengBelum ada peringkat
- KK Sir 8Dokumen7 halamanKK Sir 8harshalsparksBelum ada peringkat
- 2011 Greenship DallingaDokumen12 halaman2011 Greenship DallingaTuran Buğra TimurogluBelum ada peringkat
- Estimation of Hydrodynamic Forces and Motion of Ships With Steady Forward SpeedDokumen26 halamanEstimation of Hydrodynamic Forces and Motion of Ships With Steady Forward SpeedMir Tareque AliBelum ada peringkat
- Jmse 08 00649Dokumen23 halamanJmse 08 00649Ruchit PathakBelum ada peringkat
- M12 - Jurnal Prof Ming 2020Dokumen16 halamanM12 - Jurnal Prof Ming 2020Mark SandyBelum ada peringkat
- Numerical and Experimental Study of Classical Hydraulic JumpDokumen16 halamanNumerical and Experimental Study of Classical Hydraulic JumpM A AbdulrazaqBelum ada peringkat
- Water: Numerical Simulation of Liquid Sloshing With Different Filling Levels Using Openfoam and Experimental ValidationDokumen18 halamanWater: Numerical Simulation of Liquid Sloshing With Different Filling Levels Using Openfoam and Experimental Validationcont contaBelum ada peringkat
- Numerical Simulation of Regular Waves Onto A Vertical Circular CylinderDokumen11 halamanNumerical Simulation of Regular Waves Onto A Vertical Circular CylinderkosmitoBelum ada peringkat
- Grid Resolution PaperDokumen6 halamanGrid Resolution Paperhitokiri_01Belum ada peringkat
- Numerical Analysis For Pipeline Installation by S-Lay MethodDokumen9 halamanNumerical Analysis For Pipeline Installation by S-Lay MethodGiuseppe PasqualeBelum ada peringkat
- Greg Melling, Justin Dix, Stephen Turnock, University of Southampton - Gjm1v07@noc - Soton.ac - Uk Richard Whitehouse, HR WallingfordDokumen6 halamanGreg Melling, Justin Dix, Stephen Turnock, University of Southampton - Gjm1v07@noc - Soton.ac - Uk Richard Whitehouse, HR WallingfordMahmoud Abd El LateefBelum ada peringkat
- Jmse 08 00433 v2Dokumen23 halamanJmse 08 00433 v2Kayhan UlgenBelum ada peringkat
- Open Boundary Conditions For The Streamfunction - Vorticity Formulation of Unsteady Laminar ConvectionDokumen19 halamanOpen Boundary Conditions For The Streamfunction - Vorticity Formulation of Unsteady Laminar Convectionali_naghedifarBelum ada peringkat
- WaterDokumen16 halamanWaterPhạm Đức HoằngBelum ada peringkat
- Developing A Formula To Represent The Second-Order Wave Effects On Moored Floating StructuresDokumen14 halamanDeveloping A Formula To Represent The Second-Order Wave Effects On Moored Floating StructuresPierluigiBusettoBelum ada peringkat
- Wave Current Interaction - Effect On Force Prediction For Fixed Offshore Structures - Matecconf - Iccoee2018 - 01011Dokumen10 halamanWave Current Interaction - Effect On Force Prediction For Fixed Offshore Structures - Matecconf - Iccoee2018 - 01011mdthiyagu7553Belum ada peringkat
- A Complex Variable Method For The Floating-Body Boundary-Value ProblemDokumen14 halamanA Complex Variable Method For The Floating-Body Boundary-Value ProblemCarlos Edgardo Rodriguez BenitesBelum ada peringkat
- Finite Element Simulation of Dip Coating, I - Newtonian FluidsDokumen17 halamanFinite Element Simulation of Dip Coating, I - Newtonian FluidsLindsay SchneiderBelum ada peringkat
- Francis Noblesse - On The Theory of Three-Dimensional Flow About A Ship Moving With Constant Speed in A Regular SeaDokumen40 halamanFrancis Noblesse - On The Theory of Three-Dimensional Flow About A Ship Moving With Constant Speed in A Regular SeaYuriyAKBelum ada peringkat
- Ai Et Al, 2010 - Non Hydro Static 3dDokumen17 halamanAi Et Al, 2010 - Non Hydro Static 3ddavidddumbaBelum ada peringkat
- Wave-Induced Pressure On BreakwatersDokumen6 halamanWave-Induced Pressure On BreakwatersJaime Crescente Soto SandovalBelum ada peringkat
- Gazetas (1982) - Shear Vibrations of Vertically Inhomogeneous Earth DamsDokumen23 halamanGazetas (1982) - Shear Vibrations of Vertically Inhomogeneous Earth DamsEleni KatsanouBelum ada peringkat
- Numerical Analysis of Ship MotionDokumen10 halamanNumerical Analysis of Ship MotionAbhiBelum ada peringkat
- Shear Stress in Smooth Rectangular Open-Channel Flows: Digitalcommons@University of Nebraska - LincolnDokumen9 halamanShear Stress in Smooth Rectangular Open-Channel Flows: Digitalcommons@University of Nebraska - LincolnJake Villaruel CabauatanBelum ada peringkat
- 2007 Katrine Wave-In-Deck Loading On Fixed Steel Jacket Decks1-S2.0-S0951833907000330-MainDokumen21 halaman2007 Katrine Wave-In-Deck Loading On Fixed Steel Jacket Decks1-S2.0-S0951833907000330-Mainklop disposableBelum ada peringkat
- Effect of Water Depth On Added MassDokumen17 halamanEffect of Water Depth On Added MassPraveen BalasubramanianBelum ada peringkat
- Bed-Material Ldad: (Einstein'S MethoojDokumen41 halamanBed-Material Ldad: (Einstein'S MethoojAnand JaiswalBelum ada peringkat
- MarcheDokumen2 halamanMarcheisnogoodhassanBelum ada peringkat
- Simple Depth-Averaged Model Considering Deformation of Velocity Distribution For Hydraulic Jump and BoreDokumen8 halamanSimple Depth-Averaged Model Considering Deformation of Velocity Distribution For Hydraulic Jump and BoreManoj LanghiBelum ada peringkat
- Water: Three-Dimensional Wave-Induced Dynamic Response in Anisotropic Poroelastic SeabedDokumen19 halamanWater: Three-Dimensional Wave-Induced Dynamic Response in Anisotropic Poroelastic SeabedAdika BagaskoroBelum ada peringkat
- Boundary Shear Stress in A Trapezoidal ChannelDokumen9 halamanBoundary Shear Stress in A Trapezoidal Channeljavid_cenBelum ada peringkat
- Carbolite CWF1313 004 - 3216Dokumen44 halamanCarbolite CWF1313 004 - 3216dev-nullBelum ada peringkat
- Fontargen AJ PDFDokumen282 halamanFontargen AJ PDFantonyBelum ada peringkat
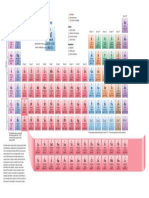
- Periodic TableDokumen1 halamanPeriodic TableChemist MookaBelum ada peringkat
- Digital-To-Analog Converter ICs SB Vol11 Issue5Dokumen12 halamanDigital-To-Analog Converter ICs SB Vol11 Issue5Hooman KaabiBelum ada peringkat
- MDR PDFDokumen34 halamanMDR PDFJohnBelum ada peringkat
- Cognac Brandies From A Region of France, Cognac Are Called Cognac. They Are Known To Be The Best Types of Brandies in The WorldDokumen3 halamanCognac Brandies From A Region of France, Cognac Are Called Cognac. They Are Known To Be The Best Types of Brandies in The Worldmanuk193Belum ada peringkat
- May June 2019 P02Dokumen40 halamanMay June 2019 P02Rongrui ZhouBelum ada peringkat
- ParkerDokumen106 halamanParkerJoseJSanchezBelum ada peringkat
- Connection Design Steel Base Plate Bs5950 v2015 01Dokumen4 halamanConnection Design Steel Base Plate Bs5950 v2015 01Anonymous j9PxwnoBelum ada peringkat
- Eb 20 11Dokumen408 halamanEb 20 11henryBelum ada peringkat
- DMPA CombinedDokumen527 halamanDMPA Combinedlolzcat3454Belum ada peringkat
- Introduction To Probability: Business Statistics: Communicating With Numbers, 4eDokumen52 halamanIntroduction To Probability: Business Statistics: Communicating With Numbers, 4eRetno Ajeng Anissa WidiatriBelum ada peringkat
- Basic Probability and Reliability Concepts: Roy Billinton Power System Research Group University of Saskatchewan CanadaDokumen248 halamanBasic Probability and Reliability Concepts: Roy Billinton Power System Research Group University of Saskatchewan CanadaSimon van BentenBelum ada peringkat
- Gas Welding and Cutting KitDokumen6 halamanGas Welding and Cutting Kitkamlesh0106Belum ada peringkat
- Uncontrolled: Direct Shear Test of Soils Under Consolidated Drained ConditionsDokumen9 halamanUncontrolled: Direct Shear Test of Soils Under Consolidated Drained ConditionsMohannad QutubBelum ada peringkat
- 1956 - Colinese - Boiler Efficiencies in SugarDokumen7 halaman1956 - Colinese - Boiler Efficiencies in SugarPaul DurkinBelum ada peringkat
- 01 - Lesson Plan - Fractions - Decimal - PercentDokumen4 halaman01 - Lesson Plan - Fractions - Decimal - PercentAnthony MontoyaBelum ada peringkat
- I. 8-Bit Microprocessors Architecture, Instruction Set and Their ProgrammingDokumen4 halamanI. 8-Bit Microprocessors Architecture, Instruction Set and Their ProgrammingSaorabh KumarBelum ada peringkat
- Queries With TableDokumen14 halamanQueries With TableAkhileshBelum ada peringkat
- Amit Udgirkar PRAJ PDFDokumen38 halamanAmit Udgirkar PRAJ PDFjpsingh75Belum ada peringkat
- Effects of Osteoarthritis and Fatigue On Proprioception of The Knee JointDokumen5 halamanEffects of Osteoarthritis and Fatigue On Proprioception of The Knee JointRosaneLacerdaBelum ada peringkat
- Adi Automotive Sensor Solutions - enDokumen6 halamanAdi Automotive Sensor Solutions - enservice autoBelum ada peringkat
- AerialSolution - 280 - Brochure - LT - New Design - Final - LRDokumen20 halamanAerialSolution - 280 - Brochure - LT - New Design - Final - LRRover DmsBelum ada peringkat
- Yokogawa 2015 Centum VP For Batch ControlDokumen9 halamanYokogawa 2015 Centum VP For Batch ControlArzymanBelum ada peringkat
- Liquefaction AnalysisDokumen16 halamanLiquefaction AnalysisKristi Engineering Services Pvt. Ltd.Belum ada peringkat
- ScanKromsator ManualDokumen9 halamanScanKromsator ManualcensoredchapterBelum ada peringkat
- Sisweb Sisweb Techdoc Techdoc Print Pag - pdf1Dokumen91 halamanSisweb Sisweb Techdoc Techdoc Print Pag - pdf1MatiussChesteerBelum ada peringkat
- Operation Manual Zoomlion QY40Dokumen133 halamanOperation Manual Zoomlion QY40Hải Tiến100% (1)
- Charger Energic Plus (Catalog)Dokumen24 halamanCharger Energic Plus (Catalog)sugar44Belum ada peringkat
- Laminar Flow Reactor ProblemDokumen6 halamanLaminar Flow Reactor ProblemAileen Banua Añonuevo100% (1)