Anda mungkin juga menyukai
- Integrali Curvilinei e SuperficieDokumen23 halamanIntegrali Curvilinei e Superficienitrosc16703Belum ada peringkat
- Esercizi Sui VettoriDokumen9 halamanEsercizi Sui VettoriVale MilesBelum ada peringkat
- Esercizi Svolti StatisticaDokumen20 halamanEsercizi Svolti Statisticalosangeles8888Belum ada peringkat
- Esercizi Di Meccanica Razionale A - V. FranceschiniDokumen93 halamanEsercizi Di Meccanica Razionale A - V. FranceschiniL2VJVR100% (1)
- Aggiornato Appunti MateDokumen1 halamanAggiornato Appunti MateMatteo GrassoBelum ada peringkat
- 1 VettoriDokumen10 halaman1 VettoriZoe RossiBelum ada peringkat
- Geometria Ed Algebra LineareDokumen20 halamanGeometria Ed Algebra LineareEdomrgBelum ada peringkat
- Dispensa N.4Dokumen15 halamanDispensa N.4fffiiutghyBelum ada peringkat
- Compiti Di Algebra Lineare e GeometriaDokumen4 halamanCompiti Di Algebra Lineare e GeometriacarmeloBelum ada peringkat
- Esercitazioni Di Meccanica RazionaleDokumen60 halamanEsercitazioni Di Meccanica RazionalemlouredocasadoBelum ada peringkat
- Chissa Chi Lo SaDokumen105 halamanChissa Chi Lo Sa1992ceroBelum ada peringkat
- Lagrangiana Campo EMDokumen6 halamanLagrangiana Campo EMPierfrancesco ButtiBelum ada peringkat
- Spazi Vettoriali e Sottospazi VettorialiDokumen16 halamanSpazi Vettoriali e Sottospazi Vettorialigerardoprota2004Belum ada peringkat
- Esercizi Compitino 1 Unipi G1 2022-23Dokumen3 halamanEsercizi Compitino 1 Unipi G1 2022-23Giuseppe Di LellaBelum ada peringkat
- Esercizi Spazi e Sottospazi Vettoriali1 PocoDocDokumen25 halamanEsercizi Spazi e Sottospazi Vettoriali1 PocoDocsimohnbleBelum ada peringkat
- Esercizi - Geometria 1Dokumen3 halamanEsercizi - Geometria 1Daniele ScoccioliniBelum ada peringkat
- Formulario Di MatematicaDokumen189 halamanFormulario Di Matematicahari seldon100% (1)
- FORMULARIODokumen30 halamanFORMULARIOMarta De SimoneBelum ada peringkat
- Formulario MatematicaDokumen31 halamanFormulario MatematicaluciacastelliBelum ada peringkat
- Spazi Vettoriali HermitianiDokumen12 halamanSpazi Vettoriali HermitianiMichelangelo PalmisanoBelum ada peringkat
- Sistemi Lineari Tempo InvariantiDokumen41 halamanSistemi Lineari Tempo InvariantialbeilmateBelum ada peringkat
- Domande OraleDokumen5 halamanDomande Oraleyannbouzan2005Belum ada peringkat
- 2 Spazi Vettoriali e Spazi Di Funzioni PDFDokumen11 halaman2 Spazi Vettoriali e Spazi Di Funzioni PDFStefanoBelum ada peringkat
- EquaDiff PDFDokumen16 halamanEquaDiff PDFLoredana MagdaBelum ada peringkat
- Vettori Coordinate PianoDokumen13 halamanVettori Coordinate PianoMattia FonteBelum ada peringkat
- GeometriaDokumen2 halamanGeometriamarioBelum ada peringkat
- Foglio Esercizi N. 8 (Forme Bilineari e Forme Quadratiche)Dokumen21 halamanFoglio Esercizi N. 8 (Forme Bilineari e Forme Quadratiche)Alberto LanzaBelum ada peringkat
- Geometria e AlgebraDokumen9 halamanGeometria e AlgebraAntonio MazzilliBelum ada peringkat
- Elaborato Benna Automatica ChiaveriniDokumen20 halamanElaborato Benna Automatica ChiaveriniLuigi ReveruzziBelum ada peringkat
- Esercizi Sui VettoriDokumen10 halamanEsercizi Sui VettoriDouwaBelum ada peringkat
- Conichemodificate 4Dokumen2 halamanConichemodificate 4g.iaculloBelum ada peringkat
- Processi GaussianiDokumen14 halamanProcessi GaussianimarcobertocchiBelum ada peringkat
- GAL 202122 Esercizi IXDokumen3 halamanGAL 202122 Esercizi IXLorenzoBelum ada peringkat
- Elaborato 5Dokumen2 halamanElaborato 5Cristian HaivazBelum ada peringkat
- Fourier PDFDokumen12 halamanFourier PDFRoberto DemariaBelum ada peringkat
- Elaborato 5Dokumen2 halamanElaborato 5Cristian HaivazBelum ada peringkat
- Totale Da Risolvere A Distanza: A, A/AA B, A/ADokumen2 halamanTotale Da Risolvere A Distanza: A, A/AA B, A/AMassimoBelum ada peringkat
- Maggiorazioni PDFDokumen3 halamanMaggiorazioni PDF123ewfdsBelum ada peringkat
- Dispense Numeri ComplessiDokumen7 halamanDispense Numeri ComplessiFrancesco Di SalesBelum ada peringkat
- Differenze FiniteDokumen18 halamanDifferenze FiniteStefano Del TedescoBelum ada peringkat
- Algebra Lineare - VettoriDokumen9 halamanAlgebra Lineare - VettoriFabrizio SchembariBelum ada peringkat
- 09 Forme DiffDokumen10 halaman09 Forme DiffsavaziBelum ada peringkat
- EserciziDokumen4 halamanEserciziRiccardo Della SalaBelum ada peringkat
- Criterio Dell'energia e L'equazione Di Maxwell-Cattaneo Nella Termodinamica Dei Sistemi Elettromagnetici Non LineariDokumen8 halamanCriterio Dell'energia e L'equazione Di Maxwell-Cattaneo Nella Termodinamica Dei Sistemi Elettromagnetici Non LineariIgnazioBelum ada peringkat
- Trasformazioni Geometriche Nel Piano Parte2Dokumen6 halamanTrasformazioni Geometriche Nel Piano Parte2Alessandro LupoBelum ada peringkat
- EsercizivettoriDokumen11 halamanEsercizivettoriOSAtoreBelum ada peringkat
- 01 Metodi Integrazione PDFDokumen8 halaman01 Metodi Integrazione PDFLuKa7990Belum ada peringkat
- Anal 2 MeglioDokumen11 halamanAnal 2 MeglioManuel FPBelum ada peringkat
- Appunti Analisi 1Dokumen162 halamanAppunti Analisi 1Federico PinzautiBelum ada peringkat
- Numeri ComplessiDokumen4 halamanNumeri ComplessiMarco Narco TorreBelum ada peringkat
- Scap 2Dokumen32 halamanScap 2danBelum ada peringkat
- Sconsigliato: Riassunto Geometria Algebra LineareDokumen14 halamanSconsigliato: Riassunto Geometria Algebra LineareAlif BoxBelum ada peringkat
- SCAM-tr 07BDokumen5 halamanSCAM-tr 07BVittorio De Luca BossoBelum ada peringkat
- Progressione logica di dodici coppie di tavole binarie (con elementi fisico-matematici correlati a concetti chiave filosoficoscientifici e metafisici, comprovanti la fondamentale struttura dualisticamente quadridimensionale dell'universo)Dari EverandProgressione logica di dodici coppie di tavole binarie (con elementi fisico-matematici correlati a concetti chiave filosoficoscientifici e metafisici, comprovanti la fondamentale struttura dualisticamente quadridimensionale dell'universo)Belum ada peringkat
- Esercizi di matematica: geometria analitica elementareDari EverandEsercizi di matematica: geometria analitica elementareBelum ada peringkat
- Slides Di DinamicaDokumen50 halamanSlides Di DinamicaCesare AngeliBelum ada peringkat
- Edgar+Allan+Poe+ +Il+Racconto+Di+Arthur+Gordon+PymDokumen120 halamanEdgar+Allan+Poe+ +Il+Racconto+Di+Arthur+Gordon+PymCesare AngeliBelum ada peringkat
- Costruzioni Aerospaziali Esercizi e DimostrazioniDokumen77 halamanCostruzioni Aerospaziali Esercizi e DimostrazioniCesare AngeliBelum ada peringkat
- Di Francesco Modelli Matematici Per L IngegneriaDokumen171 halamanDi Francesco Modelli Matematici Per L IngegneriaCesare AngeliBelum ada peringkat
- Appunti Di Acustica Musicale - A. Frova PDFDokumen159 halamanAppunti Di Acustica Musicale - A. Frova PDFDario PelusoBelum ada peringkat
- 0502 SIMIONI EquilibrioStruttureIsostaticheDokumen29 halaman0502 SIMIONI EquilibrioStruttureIsostatiche1bobo83Belum ada peringkat
- Appunti Di ElettrotecnicaDokumen526 halamanAppunti Di Elettrotecnicapaolo!!100% (2)
- Storia Del Fagotto (Adam Carse)Dokumen0 halamanStoria Del Fagotto (Adam Carse)Cesare AngeliBelum ada peringkat
- Addinsell - Concerto Di VarsaviaDokumen15 halamanAddinsell - Concerto Di VarsaviaCesare Angeli100% (3)
- Calcolo Manuale Del Logaritmo PDFDokumen22 halamanCalcolo Manuale Del Logaritmo PDFbaronto100% (1)
- Metodi e Modelli Della Mat QuantisticaDokumen755 halamanMetodi e Modelli Della Mat Quantisticaguzman87Belum ada peringkat
- Eseriziario FisicaDokumen146 halamanEseriziario FisicaCesare Angeli50% (2)
- Appunti StaticaDokumen54 halamanAppunti StaticaCesare AngeliBelum ada peringkat
- IperbolicheDokumen5 halamanIperbolicheCesare AngeliBelum ada peringkat
- Formule Di Collegamento Fra Moto Rettilineo e Moto Rotatorio ITDokumen1 halamanFormule Di Collegamento Fra Moto Rettilineo e Moto Rotatorio ITCesare AngeliBelum ada peringkat
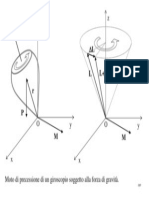
- Moto Di Precessione Di Un Giroscopio Soggetto Alla Forza Di GravitàDokumen1 halamanMoto Di Precessione Di Un Giroscopio Soggetto Alla Forza Di GravitàCesare AngeliBelum ada peringkat
- Formulario Geometria SolidaDokumen4 halamanFormulario Geometria SolidaCesare AngeliBelum ada peringkat
- Fisica Dei Materiali SaltiniDokumen53 halamanFisica Dei Materiali SaltiniCesare AngeliBelum ada peringkat
- Skoog - Chimica AnaliticaDokumen776 halamanSkoog - Chimica Analiticak1ng.BuLL87% (15)
- Speciali Momenti InerziaDokumen3 halamanSpeciali Momenti InerziaCesare AngeliBelum ada peringkat
- Chimica MatematicaDokumen72 halamanChimica MatematicaCesare AngeliBelum ada peringkat
- (Ebook - Aero) - Elementi Di Meccanica Del Volo Vol 1 (La Sapienza)Dokumen106 halaman(Ebook - Aero) - Elementi Di Meccanica Del Volo Vol 1 (La Sapienza)ingmbBelum ada peringkat
- Guida Rapida Open Office WriterDokumen143 halamanGuida Rapida Open Office Writerhindukusc80Belum ada peringkat
- Meccatronica Volume DefinitivoDokumen52 halamanMeccatronica Volume DefinitivoCesare AngeliBelum ada peringkat
- Istituzioni Di Algebra Astratta Lucio Lombardo RadiceDokumen243 halamanIstituzioni Di Algebra Astratta Lucio Lombardo RadiceCesare Angeli100% (3)
- GeometriaDokumen798 halamanGeometriaCesare Angeli100% (3)
- Ebook - Ita - Manuale Dei NodiDokumen12 halamanEbook - Ita - Manuale Dei Nodirenato_1945Belum ada peringkat
- Dispense Coronella Aggiornate 6cfu PDFDokumen163 halamanDispense Coronella Aggiornate 6cfu PDFIlaria SerraBelum ada peringkat
- Virologia CalioDokumen90 halamanVirologia CalioAndrea BarbagalloBelum ada peringkat
- AritmeticaDokumen59 halamanAritmeticaCesare Angeli100% (1)