Anda mungkin juga menyukai
- Manual HonducomprasDokumen54 halamanManual HonducomprasLuis AmadorBelum ada peringkat
- Calculo de BalerosDokumen4 halamanCalculo de BalerosCesar ChavezBelum ada peringkat
- Laboratorio N1Dokumen2 halamanLaboratorio N1Ramón Ramírez100% (1)
- Procesadores de TextoDokumen34 halamanProcesadores de TextoWalter GarciaBelum ada peringkat
- Problema Resuelto FSMDokumen9 halamanProblema Resuelto FSMLuis Ayasta PortocarreroBelum ada peringkat
- Parlantes MAHM PROSAT PDFDokumen2 halamanParlantes MAHM PROSAT PDFolegariozeladaBelum ada peringkat
- 4.3confiabilidad de SoftwareDokumen2 halaman4.3confiabilidad de SoftwareCornelio AnoniithaBelum ada peringkat
- Manual HTC Status (ChaChaCha)Dokumen2 halamanManual HTC Status (ChaChaCha)Portero_Belum ada peringkat
- Programacion Con Sockets TCP - Desbloqueado PDFDokumen22 halamanProgramacion Con Sockets TCP - Desbloqueado PDFFelix Enrique Huaman AtaullucoBelum ada peringkat
- Documento 4Dokumen7 halamanDocumento 4robinson valencia garcesBelum ada peringkat
- Sintaxis Del Comando CaclsDokumen3 halamanSintaxis Del Comando CaclsdnsreBelum ada peringkat
- Tarea 03Dokumen2 halamanTarea 03Juan José Moreno GiraldoBelum ada peringkat
- Descargar e Instalar DAEMON Tools Pro 5Dokumen14 halamanDescargar e Instalar DAEMON Tools Pro 5Galeria WilsonBelum ada peringkat
- Configuracion de AsteriskDokumen5 halamanConfiguracion de AsteriskBrian GuardaminoBelum ada peringkat
- AA1 Ev1 Desarrollo Del Cuestionario Infraestructura Tecnologica de La OrganizacionDokumen6 halamanAA1 Ev1 Desarrollo Del Cuestionario Infraestructura Tecnologica de La OrganizacionJuan Diego LozanoBelum ada peringkat
- Controles de SeguridadDokumen2 halamanControles de SeguridadBrayan RoseroBelum ada peringkat
- Bloqueo de Usuarios Maestros de SAPDokumen3 halamanBloqueo de Usuarios Maestros de SAPvicearellanoBelum ada peringkat
- Congestionamiento PDFDokumen19 halamanCongestionamiento PDFAndres MirandaBelum ada peringkat
- Explosión de InsumosDokumen13 halamanExplosión de InsumosLalo VenegasBelum ada peringkat
- Ejercicios Capítulo de LógicaDokumen13 halamanEjercicios Capítulo de LógicaCristian GarzonBelum ada peringkat
- La Distribución BinomialDokumen1 halamanLa Distribución BinomialPau SuárezBelum ada peringkat
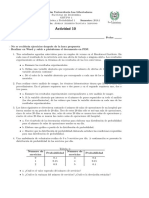
- Actividad EstadisticaDokumen2 halamanActividad EstadisticaAndrés MuñozBelum ada peringkat
- Comunicación DescendenteDokumen3 halamanComunicación Descendenteley_flowerBelum ada peringkat
- Ejercicio 4.: Aplicación de Conceptos de Rectas en R3 en La Solución de Problemas Básicos. Descripción Ejercicio 4Dokumen3 halamanEjercicio 4.: Aplicación de Conceptos de Rectas en R3 en La Solución de Problemas Básicos. Descripción Ejercicio 4Rodríguez AndresBelum ada peringkat
- Maco U1 A1Dokumen11 halamanMaco U1 A1Mariella LimBelum ada peringkat
- Modelos No LinealesDokumen8 halamanModelos No LinealesIblingLlanos100% (1)
- Plantilla Matriz de VesterDokumen6 halamanPlantilla Matriz de VesterJosé IspilcoBelum ada peringkat
- Modelos Basados en Viajes o Modelos de 4 PasosDokumen2 halamanModelos Basados en Viajes o Modelos de 4 PasosAlexandra Oñate100% (3)
- Tutorial Visual Basic 2010Dokumen202 halamanTutorial Visual Basic 2010Segundo Fernandez PerfectoBelum ada peringkat
- Modelo Declaracion Alcance VersionDokumen4 halamanModelo Declaracion Alcance VersionCarlos SantosBelum ada peringkat
- Manual para mandar a la Chingada: ¡Qué bonita chingadera!Dari EverandManual para mandar a la Chingada: ¡Qué bonita chingadera!Penilaian: 4 dari 5 bintang4/5 (5)
- Narración de historias: Domine el arte de contar una excelente historia con fines de hablar en público, crear una marca en las redes sociales, generar confianza y ventasDari EverandNarración de historias: Domine el arte de contar una excelente historia con fines de hablar en público, crear una marca en las redes sociales, generar confianza y ventasPenilaian: 5 dari 5 bintang5/5 (1)
- Stand up: Técnicas, ideas y recursos para armar tu rutina de comediaDari EverandStand up: Técnicas, ideas y recursos para armar tu rutina de comediaPenilaian: 5 dari 5 bintang5/5 (12)
- Manual de Borrachos con estilo: El beber me llamaDari EverandManual de Borrachos con estilo: El beber me llamaPenilaian: 5 dari 5 bintang5/5 (3)
- Cómo Hacer Reír a las Personas: Conviértete en el Alma de Cualquier Grupo o Situación Social al Saber Cómo Hacer Reír a CualquieraDari EverandCómo Hacer Reír a las Personas: Conviértete en el Alma de Cualquier Grupo o Situación Social al Saber Cómo Hacer Reír a CualquieraBelum ada peringkat
- Hablando a la mexicana: Frases, verbos y másDari EverandHablando a la mexicana: Frases, verbos y másPenilaian: 5 dari 5 bintang5/5 (2)
- Cómo acabar sigilosamente con la humanidadDari EverandCómo acabar sigilosamente con la humanidadPenilaian: 1 dari 5 bintang1/5 (1)
- Cómo Ser más Gracioso, Divertido y Sociable: Descubre los Secretos del Humor para Ser más Gracioso y Agradable en Cualquier GrupoDari EverandCómo Ser más Gracioso, Divertido y Sociable: Descubre los Secretos del Humor para Ser más Gracioso y Agradable en Cualquier GrupoBelum ada peringkat
- Orgullo, prejuicio… y otras formas de joderte la vida.Dari EverandOrgullo, prejuicio… y otras formas de joderte la vida.Penilaian: 5 dari 5 bintang5/5 (6)