Anda mungkin juga menyukai
- Digital Camra DesignDokumen47 halamanDigital Camra DesignbabanpBelum ada peringkat
- Digital Camera CasestudyDokumen57 halamanDigital Camera CasestudyVasantha Kumar67% (3)
- Embedded Systems Design: A Unified Hardware/Software IntroductionDokumen39 halamanEmbedded Systems Design: A Unified Hardware/Software IntroductionChaiw Fan ChaiBelum ada peringkat
- Embedded Systems Design: A Unified Hardware/Software IntroductionDokumen39 halamanEmbedded Systems Design: A Unified Hardware/Software IntroductionMalli RaoBelum ada peringkat
- Erts Chapter PPT by Vahid.Dokumen39 halamanErts Chapter PPT by Vahid.Boppudi Sasi BinduBelum ada peringkat
- Lecture 6 - Digital Camera ExampleDokumen47 halamanLecture 6 - Digital Camera ExampleGelantuBelum ada peringkat
- Embedded Systems Design: A Unified Hardware/Software IntroductionDokumen39 halamanEmbedded Systems Design: A Unified Hardware/Software IntroductionRammurtiRawatBelum ada peringkat
- Es Case StudyDokumen7 halamanEs Case StudyHemanga RanaBelum ada peringkat
- Embedded Systems Design: A Unified Hardware/Software IntroductionDokumen40 halamanEmbedded Systems Design: A Unified Hardware/Software Introductionvcrock7270Belum ada peringkat
- Embedded System Lecture Notes by Prof. Dr. Surendra Shrestha SirDokumen698 halamanEmbedded System Lecture Notes by Prof. Dr. Surendra Shrestha SirAakura Pyakura50% (2)
- PLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.Dari EverandPLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.Belum ada peringkat
- Qualcomm Hexagon ArchitectureDokumen23 halamanQualcomm Hexagon ArchitectureRahul SharmaBelum ada peringkat
- Embedded System Design: A Unified Hardware/Software Introduction - Chapter 1 SlidesDokumen37 halamanEmbedded System Design: A Unified Hardware/Software Introduction - Chapter 1 SlidesAdamNewsomeBelum ada peringkat
- Embedded Systems Design: A Unified Hardware/Software IntroductionDokumen8 halamanEmbedded Systems Design: A Unified Hardware/Software IntroductionsarangaslBelum ada peringkat
- 722 9 5 2011 ReviewDokumen101 halaman722 9 5 2011 Reviewmbscribd2011Belum ada peringkat
- Chapter 1 Introduction Embedded System by Surendra Shrestha Ioenotes PDFDokumen31 halamanChapter 1 Introduction Embedded System by Surendra Shrestha Ioenotes PDFSuman PoudelBelum ada peringkat
- Cpre 588 Embedded Computer SystemsDokumen47 halamanCpre 588 Embedded Computer SystemsAnonymous IhmXvCHj3cBelum ada peringkat
- DR Tahir Zaidi: Targets For AlgorithmsDokumen37 halamanDR Tahir Zaidi: Targets For AlgorithmsBilal AwanBelum ada peringkat
- Embedded System Design (BEE-446) : General-Purpose Processors (Software)Dokumen12 halamanEmbedded System Design (BEE-446) : General-Purpose Processors (Software)Humna KhanBelum ada peringkat
- General Purpose ProcessorsDokumen45 halamanGeneral Purpose ProcessorsJacob Chako0% (1)
- Chapter 02 - Components of CADCAMCAE SystemsDokumen35 halamanChapter 02 - Components of CADCAMCAE SystemsKeVal PaTelBelum ada peringkat
- Computer Architecture and Embedded SystemDokumen67 halamanComputer Architecture and Embedded SystemKetan JadavBelum ada peringkat
- Embedded Systems Design: A Unified Hardware/Software IntroductionDokumen35 halamanEmbedded Systems Design: A Unified Hardware/Software IntroductionSyed AshmadBelum ada peringkat
- Embedded Systems Design: A Unified Hardware/Software IntroductionDokumen44 halamanEmbedded Systems Design: A Unified Hardware/Software IntroductionM Rameez Ur RehmanBelum ada peringkat
- Be Project Final PresentationDokumen25 halamanBe Project Final Presentationkblue_8Belum ada peringkat
- Brochure Simatic-Controller Overview enDokumen10 halamanBrochure Simatic-Controller Overview enNguyễn ThắngBelum ada peringkat
- Seminar Presentation On Embedded System: Presented by - Sazid EC - 83 Roll No - 1712231093Dokumen23 halamanSeminar Presentation On Embedded System: Presented by - Sazid EC - 83 Roll No - 1712231093md.sazid ansariBelum ada peringkat
- Acknowledgement: - The Bulk of The Material in This Lecture Is Adapted FromDokumen7 halamanAcknowledgement: - The Bulk of The Material in This Lecture Is Adapted FromSyed Ovais AhmedBelum ada peringkat
- Ece Viii Embedded System Design (06ec82) NotesDokumen270 halamanEce Viii Embedded System Design (06ec82) NotesBSRohitBelum ada peringkat
- Digital Camera - Case StudyDokumen31 halamanDigital Camera - Case StudyRockey Suseelan92% (12)
- Embedded System Design-PresentationDokumen120 halamanEmbedded System Design-PresentationAdarsh Prakash100% (1)
- Hệ thống nhúng.Dokumen52 halamanHệ thống nhúng.Tuấn NguyễnBelum ada peringkat
- HCIA-Intelligent Vision V1.0 Training MaterialDokumen403 halamanHCIA-Intelligent Vision V1.0 Training MaterialTasos KorkodeilosBelum ada peringkat
- Embedded System Case StudyDokumen6 halamanEmbedded System Case StudyRavi kumar ArigelaBelum ada peringkat
- Chapter 1: Embedded Systems: Dr. Jibran K. YousafzaiDokumen47 halamanChapter 1: Embedded Systems: Dr. Jibran K. YousafzaiAhmed GaafarBelum ada peringkat
- Project JPEG DecoderDokumen16 halamanProject JPEG DecoderParsa AminiBelum ada peringkat
- System On Chip (SOC) (1) Chapter 1Dokumen25 halamanSystem On Chip (SOC) (1) Chapter 1Mohammed HarisBelum ada peringkat
- Image CompressionDokumen42 halamanImage CompressionNasir AliBelum ada peringkat
- PC ComponentsDokumen16 halamanPC ComponentsJoey Jean LimBelum ada peringkat
- Embedded Systems IntroductionDokumen42 halamanEmbedded Systems IntroductionYogesh MisraBelum ada peringkat
- Mohanad - System On Chip (SOC)Dokumen25 halamanMohanad - System On Chip (SOC)Vigya JindalBelum ada peringkat
- SOC - BasicsDokumen52 halamanSOC - BasicsShanmukha Pulipati100% (2)
- IT Chapter 3Dokumen12 halamanIT Chapter 3Alice HovsepyanBelum ada peringkat
- 1 2/21/2022 Esd Unit 1Dokumen62 halaman1 2/21/2022 Esd Unit 1Mohammad AshrafBelum ada peringkat
- Embedded Systems Design: A Unified Hardware/Software IntroductionDokumen39 halamanEmbedded Systems Design: A Unified Hardware/Software IntroductionAshok KumarBelum ada peringkat
- SysCat - I181E-EN-07+Sysmac StudioDokumen14 halamanSysCat - I181E-EN-07+Sysmac StudioJederVieiraBelum ada peringkat
- Sorin SystemDokumen31 halamanSorin SystemAamir ShaikBelum ada peringkat
- 09 AcceleratorsDokumen47 halaman09 AcceleratorsgkudrethayaBelum ada peringkat
- Adsd U1Dokumen79 halamanAdsd U1Sushant BaigBelum ada peringkat
- Manual For Cycle 1Dokumen193 halamanManual For Cycle 1Seth GreeneBelum ada peringkat
- 633888485056270520Dokumen115 halaman633888485056270520rafeshBelum ada peringkat
- CH 1Dokumen55 halamanCH 1Wei-Lun HuangBelum ada peringkat
- Edma Controller: Level 1 Programme MemoryDokumen5 halamanEdma Controller: Level 1 Programme MemoryAchmad ZuchalBelum ada peringkat
- Bumblebee XB3 Getting Started ManualDokumen2 halamanBumblebee XB3 Getting Started ManualHang DongBelum ada peringkat
- On TrainingDokumen43 halamanOn TrainingRohitt MathurBelum ada peringkat
- Session 1Dokumen45 halamanSession 1Binh VanBelum ada peringkat
- Unit 6 ECE131 - Part 4 - K1Dokumen66 halamanUnit 6 ECE131 - Part 4 - K1abhi shekBelum ada peringkat
- Vector IRAM: A Microprocessor Architecture For Media ProcessingDokumen15 halamanVector IRAM: A Microprocessor Architecture For Media ProcessingNoman Ali ShahBelum ada peringkat
- Dreamcast Architecture: Architecture of Consoles: A Practical Analysis, #9Dari EverandDreamcast Architecture: Architecture of Consoles: A Practical Analysis, #9Belum ada peringkat
- LIFI PresentationDokumen15 halamanLIFI PresentationAditya SinghBelum ada peringkat
- ACA UNIT-5 NotesDokumen15 halamanACA UNIT-5 Notespraveennegiuk07Belum ada peringkat
- TutorialsDokumen17 halamanTutorialsnandini chinthalaBelum ada peringkat
- Smart Connection 7.2 User Guide For InDesignDokumen361 halamanSmart Connection 7.2 User Guide For InDesignMarina MiBelum ada peringkat
- Query BuildingDokumen10 halamanQuery Buildingcesar beajaranoBelum ada peringkat
- Proposal - Axis BankDokumen51 halamanProposal - Axis BankRahul S DevBelum ada peringkat
- Zerto Virtual Manager Administration GuideDokumen336 halamanZerto Virtual Manager Administration GuideVakul BhattBelum ada peringkat
- Windows Processor Requirements Windows 11 Supported AMD Processors - Microsoft DocsDokumen1 halamanWindows Processor Requirements Windows 11 Supported AMD Processors - Microsoft DocscursantcataBelum ada peringkat
- Spring Batch Tutorial - Reading Information From A FileDokumen21 halamanSpring Batch Tutorial - Reading Information From A FileBala KulandaiBelum ada peringkat
- Pamantasan NG Lungsod NG MuntinlupaDokumen6 halamanPamantasan NG Lungsod NG MuntinlupaLuis AbawagBelum ada peringkat
- Federal Communications Commission 90.35: 90.33 General EligibilityDokumen40 halamanFederal Communications Commission 90.35: 90.33 General EligibilityAl_CodaBelum ada peringkat
- 7UT85Dokumen9 halaman7UT85sparkCE100% (1)
- Firmware Upgrade Guide enDokumen4 halamanFirmware Upgrade Guide enPau CorellaBelum ada peringkat
- ThinPrep® Genesis™ Processor Brochure GBR ENDokumen3 halamanThinPrep® Genesis™ Processor Brochure GBR ENJösêii ChâmörröBelum ada peringkat
- 30 Rat BCU TechsheetDokumen2 halaman30 Rat BCU TechsheetBryan OngBelum ada peringkat
- Types of Computer Networks: Maninder KaurDokumen18 halamanTypes of Computer Networks: Maninder Kaurdaniel ayobamiBelum ada peringkat
- Fully Automated 3D Colon Segmentation and Volume Rendering in Virtual RealityDokumen9 halamanFully Automated 3D Colon Segmentation and Volume Rendering in Virtual RealityJamil Al-idrusBelum ada peringkat
- FPSO Swivel Load MonitoringDokumen1 halamanFPSO Swivel Load MonitoringKim OanhBelum ada peringkat
- Evolution of NetworksDokumen21 halamanEvolution of NetworksScribd Dot ComBelum ada peringkat
- Pert ChartDokumen20 halamanPert Chartshweta bhilawadiBelum ada peringkat
- SynchronizationDokumen114 halamanSynchronizationSudha PatelBelum ada peringkat
- An Exposure of Automatic Meter Reading Anticipated For Instant Billing and Power Controlling ApplicationsDokumen4 halamanAn Exposure of Automatic Meter Reading Anticipated For Instant Billing and Power Controlling ApplicationsEditor IJRITCCBelum ada peringkat
- Working Together ApartDokumen8 halamanWorking Together ApartIzo SeremBelum ada peringkat
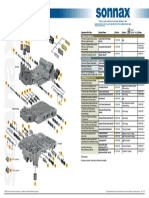
- Aisin AW TF-81SC: Click On Part Numbers For Product Details or VisitDokumen1 halamanAisin AW TF-81SC: Click On Part Numbers For Product Details or Visittejonmx100% (1)
- Product Thinking vs. Project ThinkingDokumen8 halamanProduct Thinking vs. Project ThinkingUjwal TickooBelum ada peringkat
- Career Profile: Marine EngineerDokumen5 halamanCareer Profile: Marine EngineerSaravanan BaluBelum ada peringkat
- Sammuel Augusto Gomes MachadoDokumen2 halamanSammuel Augusto Gomes MachadoSam MachadoBelum ada peringkat
- S4 Analytics OptionsDokumen6 halamanS4 Analytics Optionsnewkaox2009Belum ada peringkat
- PI Calliope SQN3223 3 20160205 Web PDFDokumen2 halamanPI Calliope SQN3223 3 20160205 Web PDFrqueirosBelum ada peringkat
- Somerset West Tattersalls CC: Trading As Vegas BetsDokumen8 halamanSomerset West Tattersalls CC: Trading As Vegas BetsBereng SekBelum ada peringkat