Anda mungkin juga menyukai
- Solutions - Levi a.F.J. Applied Quantum Mechanics.. Solutions Manual (2ed., CUP, 2006) (ISBN 0521860962) (73s) - PQMTBDokumen73 halamanSolutions - Levi a.F.J. Applied Quantum Mechanics.. Solutions Manual (2ed., CUP, 2006) (ISBN 0521860962) (73s) - PQMTBenareshkumar23100% (1)
- A.MAULANA MALIK MH Dinamika Struktur c10Dokumen6 halamanA.MAULANA MALIK MH Dinamika Struktur c10Maulana MalikBelum ada peringkat
- Mechanical Vibration Solved ExamplesDokumen84 halamanMechanical Vibration Solved ExamplesKajal Khan100% (2)
- Homework #4 MEMS6460: (30 Points)Dokumen7 halamanHomework #4 MEMS6460: (30 Points)vidhukiran100% (1)
- MD 5BDokumen73 halamanMD 5Bctvd93100% (1)
- ME189 Chapter 4Dokumen71 halamanME189 Chapter 4Yatish Kumar Singh100% (1)
- Lista 3Dokumen7 halamanLista 3Rodolfo Souza MartinsBelum ada peringkat
- HW09 - Angular Momentum Conservation and GravitationDokumen8 halamanHW09 - Angular Momentum Conservation and GravitationBradley NartowtBelum ada peringkat
- Timber Design Chapter 1Dokumen10 halamanTimber Design Chapter 1Mac MacBelum ada peringkat
- Structural Idealization - Hw6Dokumen20 halamanStructural Idealization - Hw6AlexBelum ada peringkat
- Biomems-Module3Dokumen50 halamanBiomems-Module3Sripathi Siva PrasadBelum ada peringkat
- Fluid Mechanics Exercises - 1Dokumen6 halamanFluid Mechanics Exercises - 1Nrz Slvcn100% (1)
- Stresses in BeamsDokumen34 halamanStresses in BeamsMohammad TahaBelum ada peringkat
- PS6 SolDokumen10 halamanPS6 SolgarridolopezBelum ada peringkat
- Test Exams PDFDokumen7 halamanTest Exams PDFShaheer Ahmed KhanBelum ada peringkat
- F5930309Gate 2017 CivilDokumen83 halamanF5930309Gate 2017 CivilSamarjeet Kumar SinghBelum ada peringkat
- Prestress Concrete (24-30)Dokumen33 halamanPrestress Concrete (24-30)Prantik Adhar SamantaBelum ada peringkat
- 1.mechanical Technology A Two Year Course 257 294 - Compressed 20 38Dokumen19 halaman1.mechanical Technology A Two Year Course 257 294 - Compressed 20 38josh harleedBelum ada peringkat
- IMoM 6BDokumen42 halamanIMoM 6BDaniel Laurence Salazar ItableBelum ada peringkat
- JPICE Quiz BeeDokumen12 halamanJPICE Quiz BeemateojullieanneBelum ada peringkat
- Final PDFDokumen69 halamanFinal PDFKenneth CabarBelum ada peringkat
- Waves SolutionDokumen6 halamanWaves SolutionLava SatBelum ada peringkat
- 2 - Flexural Beam (WSD or ASD)Dokumen24 halaman2 - Flexural Beam (WSD or ASD)Yusf RwandzyBelum ada peringkat
- Mecn3027 Mechanics Vibrations Tutorial 4 - Single DOF Damped, Forced VibrationDokumen1 halamanMecn3027 Mechanics Vibrations Tutorial 4 - Single DOF Damped, Forced VibrationMohamed Aadil RahimBelum ada peringkat
- 10 - SHM, Springs, DampingDokumen4 halaman10 - SHM, Springs, DampingBradley NartowtBelum ada peringkat
- 325 - 12-07 - Elasticity - 43-51Dokumen7 halaman325 - 12-07 - Elasticity - 43-51Bradley NartowtBelum ada peringkat
- Strip MethodDokumen11 halamanStrip MethodAmanuelBelum ada peringkat
- Week 4 Assignment 4 Solution Full Marks 16: NC 2 Go 2 N NC Go 2Dokumen3 halamanWeek 4 Assignment 4 Solution Full Marks 16: NC 2 Go 2 N NC Go 2APP SPPBelum ada peringkat
- CE Weekend Knockout Quiz With Answer Key PDFDokumen19 halamanCE Weekend Knockout Quiz With Answer Key PDFppppp100% (1)
- Vibration EngineeringDokumen37 halamanVibration EngineeringAlen Benguit II0% (1)
- Oneil StrengthsDokumen22 halamanOneil StrengthsOneil Prettyboyswagg LeitchBelum ada peringkat
- RC2009 University of HongKong Reinforced Concrete DesignDokumen29 halamanRC2009 University of HongKong Reinforced Concrete DesignApril IngramBelum ada peringkat
- PEF 2309 Fundamentos de Mecânica Das Estruturas Timoshenko, S.P.,PWS Publishing Company, 1997, Boston, USA, p.408-410, 580-583. Example 8-4Dokumen6 halamanPEF 2309 Fundamentos de Mecânica Das Estruturas Timoshenko, S.P.,PWS Publishing Company, 1997, Boston, USA, p.408-410, 580-583. Example 8-4Jc FortBelum ada peringkat
- Question Paper Code:: Reg. No.Dokumen5 halamanQuestion Paper Code:: Reg. No.Venkat.G SuryaBelum ada peringkat
- Verification Problems 2003Dokumen55 halamanVerification Problems 2003HozaifaBelum ada peringkat
- CIE3150 2017 Case Study Beam V 03-2Dokumen19 halamanCIE3150 2017 Case Study Beam V 03-2FerdiVKBelum ada peringkat
- Analyis of Hollow Slab CoreDokumen13 halamanAnalyis of Hollow Slab CoreHendra GintingBelum ada peringkat
- Chapter 05Dokumen12 halamanChapter 05Sanjoy JenaBelum ada peringkat
- Indrumator Metal - EGDokumen37 halamanIndrumator Metal - EGhooky1100% (1)
- Bending and Shear 1 Solved ProblemsDokumen22 halamanBending and Shear 1 Solved Problemsdmaldonado2003Belum ada peringkat
- Timber DesignDokumen26 halamanTimber DesignRichmon Pangilinan100% (6)
- PartDokumen9 halamanPartMahendranath Ramakrishnan0% (2)
- تصميم عمود 14 متر +مدونه الممارسةDokumen27 halamanتصميم عمود 14 متر +مدونه الممارسةAhmed JaBelum ada peringkat
- Dynamics and VibrationsDokumen19 halamanDynamics and Vibrationsadhi2796Belum ada peringkat
- Example 3 Rectangular SiloDokumen7 halamanExample 3 Rectangular SiloAhmed Said50% (2)
- Free Vibration Motion ExamDokumen3 halamanFree Vibration Motion ExamAhmed AtefBelum ada peringkat
- Nota Bending MoementDokumen47 halamanNota Bending MoementAfiq NajmiBelum ada peringkat
- Jipmer 2015 Solved QPDokumen67 halamanJipmer 2015 Solved QPS Balagopal Sivaprakasam67% (3)
- Solved Problems Ch1Dokumen3 halamanSolved Problems Ch1irshad224100% (2)
- O level Physics Questions And Answer Practice Papers 2Dari EverandO level Physics Questions And Answer Practice Papers 2Penilaian: 5 dari 5 bintang5/5 (1)
- 3D Modeling of Nonlinear Wave Phenomena on Shallow Water SurfacesDari Everand3D Modeling of Nonlinear Wave Phenomena on Shallow Water SurfacesBelum ada peringkat
- Interactions between Electromagnetic Fields and Matter: Vieweg Tracts in Pure and Applied PhysicsDari EverandInteractions between Electromagnetic Fields and Matter: Vieweg Tracts in Pure and Applied PhysicsBelum ada peringkat
- Strength of Materials and Structures: An Introduction to the Mechanics of Solids and StructuresDari EverandStrength of Materials and Structures: An Introduction to the Mechanics of Solids and StructuresPenilaian: 4 dari 5 bintang4/5 (1)
- Mechanical Science for Technicians: Volume 1Dari EverandMechanical Science for Technicians: Volume 1Penilaian: 5 dari 5 bintang5/5 (1)
- Analytical Modeling of Solute Transport in Groundwater: Using Models to Understand the Effect of Natural Processes on Contaminant Fate and TransportDari EverandAnalytical Modeling of Solute Transport in Groundwater: Using Models to Understand the Effect of Natural Processes on Contaminant Fate and TransportBelum ada peringkat
- Sensor and Signal ConditioningDokumen49 halamanSensor and Signal Conditioningsabarivelan sBelum ada peringkat
- CoventorWare TutorialDokumen41 halamanCoventorWare TutorialforceofconstructionBelum ada peringkat
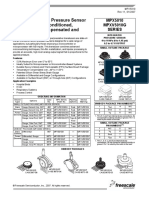
- Pressure Sensors Design Engineers Guide EN Document PDFDokumen97 halamanPressure Sensors Design Engineers Guide EN Document PDFMiuta IrinelBelum ada peringkat
- Strain Gages and Humidity TransducersDokumen37 halamanStrain Gages and Humidity TransducersTed John OranteBelum ada peringkat
- MEMS-Design-Chap-1-OVERVIEW - G PDokumen77 halamanMEMS-Design-Chap-1-OVERVIEW - G PMạnh KỳBelum ada peringkat
- MPX2050Dokumen9 halamanMPX2050malae84Belum ada peringkat
- Pressure Sensor HistoryDokumen38 halamanPressure Sensor HistoryBrian McMorris100% (3)
- Selecting Strain Gages Silicon Vs Metal Foil: Application Note: An-100Dokumen8 halamanSelecting Strain Gages Silicon Vs Metal Foil: Application Note: An-100Anbu nilaBelum ada peringkat
- Oil Pressure Sensor Product ListDokumen10 halamanOil Pressure Sensor Product ListosanebiBelum ada peringkat
- Soft Sensors For ContinuousDokumen16 halamanSoft Sensors For ContinuousHari Prasath T RBelum ada peringkat
- Semiconductor Technical Data: 0 To 100 Kpa (0 To 14.5 Psi) 40 MV Full Scale Span (Typical)Dokumen8 halamanSemiconductor Technical Data: 0 To 100 Kpa (0 To 14.5 Psi) 40 MV Full Scale Span (Typical)jugybocaBelum ada peringkat
- FSS-SMT Series: Low Profile Force SensorDokumen5 halamanFSS-SMT Series: Low Profile Force Sensorxtansion 2Belum ada peringkat
- ME189 Chapter 7Dokumen48 halamanME189 Chapter 7kunalspandana100% (1)
- Physical Principles of Vibration and Measurement TechniquesDokumen9 halamanPhysical Principles of Vibration and Measurement TechniquesSonali Bangar100% (1)
- Piezoresistive MembraneDokumen18 halamanPiezoresistive MembraneAnshika PatelBelum ada peringkat
- MPXHZ6115ADokumen17 halamanMPXHZ6115Ad.c.delatorre2200Belum ada peringkat
- Senpresion MPX5010Dokumen18 halamanSenpresion MPX5010HULBER RODRIGO RODRIGUEZ PINZONBelum ada peringkat
- Smart BracketsDokumen6 halamanSmart BracketslahyouhBelum ada peringkat
- Sensor Lect9Dokumen33 halamanSensor Lect9ajayBelum ada peringkat
- Overview of MEMSDokumen152 halamanOverview of MEMSDr. Sampatrao L PinjareBelum ada peringkat
- Mpxh6400a 185587Dokumen12 halamanMpxh6400a 185587TDFRIOGRANDEBelum ada peringkat
- Sensor - MPXV5004G PDFDokumen22 halamanSensor - MPXV5004G PDFDaniel CadenaBelum ada peringkat
- Mechanical Transducers: AccelerometersDokumen13 halamanMechanical Transducers: Accelerometersvijayamkulkarni86Belum ada peringkat
- MPX5010Dokumen16 halamanMPX5010Arsonval FleuryBelum ada peringkat
- Accelerometer SensorDokumen110 halamanAccelerometer SensorChandra ShekarBelum ada peringkat
- Fabrication of A Piezoresistive Pressure SensorDokumen4 halamanFabrication of A Piezoresistive Pressure Sensorsamo25Belum ada peringkat
- Describe The Construction of A Electromagnetic Velocity Sensor and Explain Its WorkingDokumen8 halamanDescribe The Construction of A Electromagnetic Velocity Sensor and Explain Its WorkingJiten Thakur100% (1)
- Tejavathbhavsingh EEN208 Lab5Dokumen29 halamanTejavathbhavsingh EEN208 Lab5suriya rsBelum ada peringkat
- Piezoresistive Cantilever Beam For Force Sensing in Two DimensionsDokumen9 halamanPiezoresistive Cantilever Beam For Force Sensing in Two DimensionsnguyenphucthuanBelum ada peringkat
- A high temperature pressure sensor with β-SiCpiezoresistors on SOI substratesDokumen4 halamanA high temperature pressure sensor with β-SiCpiezoresistors on SOI substratesmala sBelum ada peringkat