Anda mungkin juga menyukai
- What Is Amplitude ModulationDokumen15 halamanWhat Is Amplitude ModulationRachhan Khorn100% (1)
- Forescout Modern NAC and Device VisibilityDokumen12 halamanForescout Modern NAC and Device VisibilityM Saad KhanBelum ada peringkat
- Api Reference Guide PDFDokumen440 halamanApi Reference Guide PDFpriyank31Belum ada peringkat
- Projects With Microcontrollers And PICCDari EverandProjects With Microcontrollers And PICCPenilaian: 5 dari 5 bintang5/5 (1)
- Oracle Reports 10g Ekit PDFDokumen760 halamanOracle Reports 10g Ekit PDFykamal7Belum ada peringkat
- CPU Central Processing UnitDokumen73 halamanCPU Central Processing UnitShiv Patel 18-38Belum ada peringkat
- Practical Reverse Engineering: x86, x64, ARM, Windows Kernel, Reversing Tools, and ObfuscationDari EverandPractical Reverse Engineering: x86, x64, ARM, Windows Kernel, Reversing Tools, and ObfuscationBelum ada peringkat
- History of Computing - WikipediaDokumen51 halamanHistory of Computing - Wikipediaعلی رضاBelum ada peringkat
- DRF450 Workshop Manual VDRF03 - 02GB PDFDokumen128 halamanDRF450 Workshop Manual VDRF03 - 02GB PDFANH LÊ100% (1)
- Resume of Java Developer - J2EE - Java Developer ResumeDokumen5 halamanResume of Java Developer - J2EE - Java Developer Resumerandeer78Belum ada peringkat
- The Ages of Globalization Geography Technology and Institutions by Jeffrey D. SachsDokumen316 halamanThe Ages of Globalization Geography Technology and Institutions by Jeffrey D. SachsJesus Rubio50% (2)
- Lab Practical File: " Embedded System's "Dokumen17 halamanLab Practical File: " Embedded System's "Saba WasimBelum ada peringkat
- Procedure and Macro in AssemblyDokumen17 halamanProcedure and Macro in AssemblyroshaanBelum ada peringkat
- M-4 CODokumen61 halamanM-4 COrohitrajww4Belum ada peringkat
- Module-2 NotesDokumen28 halamanModule-2 NotesAnkith S RaoBelum ada peringkat
- DLX ArchitectureDokumen9 halamanDLX ArchitectureRonald BuckBelum ada peringkat
- VIMP Micro QuestionsDokumen68 halamanVIMP Micro QuestionsayushnaleBelum ada peringkat
- Computer Science Department: Majlis Arts and Science College, PuramannurDokumen20 halamanComputer Science Department: Majlis Arts and Science College, PuramannurJyothiBelum ada peringkat
- UNIT III: Central Processing Unit: GeneralDokumen25 halamanUNIT III: Central Processing Unit: GeneralGagandeep SinghBelum ada peringkat
- 5 6251119711560401156Dokumen26 halaman5 6251119711560401156Vineesh M MadathodiBelum ada peringkat
- PT-2 DTM Question Bank (UPDATEDDokumen11 halamanPT-2 DTM Question Bank (UPDATEDAayush WaghereBelum ada peringkat
- Instruction Sequencing and Processor ArchitectureDokumen25 halamanInstruction Sequencing and Processor Architecturesamueljamespeter100% (4)
- Lab Sheet For Chapter 9Dokumen26 halamanLab Sheet For Chapter 9karnsushantlalBelum ada peringkat
- An Introduction To Linear Recursive Sequences in Spread Spectrum SystemsDokumen23 halamanAn Introduction To Linear Recursive Sequences in Spread Spectrum SystemsMarwa AtefBelum ada peringkat
- MC Lab Manual Vtu8Dokumen44 halamanMC Lab Manual Vtu8legend99hackerBelum ada peringkat
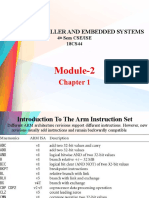
- Module-2: Microcontroller and Embedded SystemsDokumen74 halamanModule-2: Microcontroller and Embedded Systemsswethaashok28Belum ada peringkat
- Instruction Set 8086Dokumen104 halamanInstruction Set 8086Vishnu Shashank100% (1)
- Programable PPTDokumen91 halamanProgramable PPTJay PatelBelum ada peringkat
- Cep 3Dokumen11 halamanCep 3ShivamBelum ada peringkat
- Microcontrollers Lab ManualDokumen37 halamanMicrocontrollers Lab ManualArati DazBelum ada peringkat
- Assembler Language - 8051powerpoint PresentationDokumen56 halamanAssembler Language - 8051powerpoint PresentationtauseeeeeeeeBelum ada peringkat
- ACE201slides 8Dokumen75 halamanACE201slides 8alexistheBelum ada peringkat
- Unconditional Jump InstructionsDokumen13 halamanUnconditional Jump InstructionsAnonymous T9VvkMaBelum ada peringkat
- ARM Instruction SetDokumen58 halamanARM Instruction SetPoorva RathoreBelum ada peringkat
- Outline: Unit - 4Dokumen39 halamanOutline: Unit - 4ShivamSkylerBelum ada peringkat
- Lab 6 - Data Transfer InstructionsDokumen15 halamanLab 6 - Data Transfer InstructionsVityaBelum ada peringkat
- PIC 18 Introduction: GCS250 Computer Architecture Gustavo Rodriguez-Rivera Purdue UniversityDokumen36 halamanPIC 18 Introduction: GCS250 Computer Architecture Gustavo Rodriguez-Rivera Purdue Universityamhosny2010Belum ada peringkat
- Lecture 34 PDFDokumen6 halamanLecture 34 PDFMarcus HoangBelum ada peringkat
- 8051 Assembly LanguageDokumen39 halaman8051 Assembly LanguagemanvithbBelum ada peringkat
- Mic CT-2Dokumen11 halamanMic CT-2manaskadganchi2006kBelum ada peringkat
- Lecture6 ARMDokumen50 halamanLecture6 ARMRohith ThurlapatiBelum ada peringkat
- Advanced Compiler Design and Implementation: Run-Time SupportDokumen27 halamanAdvanced Compiler Design and Implementation: Run-Time SupportvadriangmailBelum ada peringkat
- Unit 3 1.A) .Machine InstructionsDokumen13 halamanUnit 3 1.A) .Machine InstructionsLovely VasanthBelum ada peringkat
- Microcontroller Lab ManualDokumen38 halamanMicrocontroller Lab Manualharshitha100% (1)
- The ARC ProcessorDokumen10 halamanThe ARC ProcessorDaniel LoveraBelum ada peringkat
- IV 8051manua PDFDokumen56 halamanIV 8051manua PDFIrfan KhanBelum ada peringkat
- Part I-General Pgms 8086Dokumen11 halamanPart I-General Pgms 8086Prithivi RajBelum ada peringkat
- ARM Processor GuideDokumen65 halamanARM Processor GuideSaurabh GargBelum ada peringkat
- MIC PT 2 Que Bank With Solution 2023 24Dokumen27 halamanMIC PT 2 Que Bank With Solution 2023 24survasesuraj04Belum ada peringkat
- BLC 10 StackDokumen34 halamanBLC 10 StackNistor RoxanaBelum ada peringkat
- The Input and Output Devices Are Assigned and Identified by 16-Bit AddressesDokumen43 halamanThe Input and Output Devices Are Assigned and Identified by 16-Bit AddressesEnesVSBelum ada peringkat
- Chapter Six: The 80x86 Instruction SetDokumen44 halamanChapter Six: The 80x86 Instruction SetAbdifitahBelum ada peringkat
- Microcontroller (1) Lab Manual: Prepared By: Eng: Mohsen Ali AL-awami Supervisered By: DR: 2010-2011Dokumen20 halamanMicrocontroller (1) Lab Manual: Prepared By: Eng: Mohsen Ali AL-awami Supervisered By: DR: 2010-2011Nazma BegumBelum ada peringkat
- Microcontroller Lab ManualDokumen38 halamanMicrocontroller Lab ManualAkash Kumar58% (12)
- Subroutines and Loop DelayDokumen8 halamanSubroutines and Loop Delayitsanshika555Belum ada peringkat
- RISC Instruction Set:: I) Data Manipulation InstructionsDokumen8 halamanRISC Instruction Set:: I) Data Manipulation InstructionsSwarup BharBelum ada peringkat
- 8051 Instruction SetDokumen81 halaman8051 Instruction SetSaket GargBelum ada peringkat
- 36 Interrupts-AsmDokumen5 halaman36 Interrupts-AsmvishnuksBelum ada peringkat
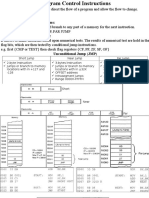
- Program Control Instructions Lecture 7 and 8Dokumen39 halamanProgram Control Instructions Lecture 7 and 8Dawit Tesfaye100% (1)
- Python Programming Loops, Strings and FilesDokumen25 halamanPython Programming Loops, Strings and FilesKishan Razer CruiseBelum ada peringkat
- 02-3-Sequential Logic Synthesis With VHDLDokumen18 halaman02-3-Sequential Logic Synthesis With VHDLEdward ConalBelum ada peringkat
- TRAP Routines and SubroutinesDokumen32 halamanTRAP Routines and SubroutinesNirmal GuptaBelum ada peringkat
- Unix Shell Programming Interview Questions You'll Most Likely Be Asked: Job Interview Questions SeriesDari EverandUnix Shell Programming Interview Questions You'll Most Likely Be Asked: Job Interview Questions SeriesBelum ada peringkat
- ROUTING INFORMATION PROTOCOL: RIP DYNAMIC ROUTING LAB CONFIGURATIONDari EverandROUTING INFORMATION PROTOCOL: RIP DYNAMIC ROUTING LAB CONFIGURATIONBelum ada peringkat
- Vehicle Running Account (Vra) December 2022 RCCKDokumen12 halamanVehicle Running Account (Vra) December 2022 RCCKm.fadhlyaugustami fadhlyBelum ada peringkat
- D ch07Dokumen50 halamanD ch07mullai03Belum ada peringkat
- Unit 3 Working With XML Introduction To XMLDokumen41 halamanUnit 3 Working With XML Introduction To XMLAishwaryaBelum ada peringkat
- TD100 VDM Installation ManualDokumen25 halamanTD100 VDM Installation ManualSumit KumarBelum ada peringkat
- Lecture Notes On Permanent Magnet Brushless DC Motor Drive For Light Electric Vehicle ApplicationDokumen24 halamanLecture Notes On Permanent Magnet Brushless DC Motor Drive For Light Electric Vehicle ApplicationAshish KumarBelum ada peringkat
- A Survey of VPN Performance EvaluationDokumen5 halamanA Survey of VPN Performance EvaluationEditor IJRITCCBelum ada peringkat
- Nagachethan - Test ManagerDokumen1 halamanNagachethan - Test ManagerNagachetan SPBelum ada peringkat
- Unity P Replication Config PDFDokumen94 halamanUnity P Replication Config PDFgupteshbheriBelum ada peringkat
- 6 1 1 Procedures Recording Qualitative DataDokumen2 halaman6 1 1 Procedures Recording Qualitative DataRhenmar Morales GalvezBelum ada peringkat
- AnatomageDokumen12 halamanAnatomageapi-446183922Belum ada peringkat
- p328.07x - Vogue Wireless Charging Speaker 2Dokumen28 halamanp328.07x - Vogue Wireless Charging Speaker 2Georgie SBelum ada peringkat
- TCS Prep Camp DBMSDokumen120 halamanTCS Prep Camp DBMSfrzi frziBelum ada peringkat
- Rulebook For Technovision'11: Electrical and Electronics EngineeringDokumen5 halamanRulebook For Technovision'11: Electrical and Electronics EngineeringKhushbu BuchchaBelum ada peringkat
- Qas 125-150 Vod (LS)Dokumen2 halamanQas 125-150 Vod (LS)Sico LabenBelum ada peringkat
- Central Finance enables real-time financial view across systemsDokumen3 halamanCentral Finance enables real-time financial view across systemsJyotiraditya BanerjeeBelum ada peringkat
- Connecting Networks ILMDokumen282 halamanConnecting Networks ILMRuy Pequeno CidBelum ada peringkat
- Ns-Jsra: Risk Type: Risk TypeDokumen6 halamanNs-Jsra: Risk Type: Risk TypeMarco MotaBelum ada peringkat
- DMC 550Dokumen45 halamanDMC 550Pandu Sandi PratamaBelum ada peringkat
- College Diploma Theme With Art Deco Borders and Frames by SlidesgoDokumen47 halamanCollege Diploma Theme With Art Deco Borders and Frames by SlidesgoJigyasu DinodiaBelum ada peringkat
- TMEIC Crane Control IndustryDokumen32 halamanTMEIC Crane Control IndustryBoy AlfredoBelum ada peringkat
- If A Pedestrian Is Hit and Lands On The Front of The Car, The Airbag InflatesDokumen1 halamanIf A Pedestrian Is Hit and Lands On The Front of The Car, The Airbag InflatesYu SunBelum ada peringkat
- Elec Grs Pumps 203seriesDokumen5 halamanElec Grs Pumps 203serieschand_yelBelum ada peringkat