Anda mungkin juga menyukai
- Dynamics Rectilinear - Continuous and ErraticDokumen67 halamanDynamics Rectilinear - Continuous and ErraticJJ EnzonBelum ada peringkat
- Chapter 1 Part1Dokumen116 halamanChapter 1 Part1G00GLRBelum ada peringkat
- Chapter II (Compatibility Mode)Dokumen160 halamanChapter II (Compatibility Mode)Biruk TemesgenBelum ada peringkat
- Dynamics Lecture2 General Curvilinear Motion - Rectangular Components and Projectile MotionDokumen41 halamanDynamics Lecture2 General Curvilinear Motion - Rectangular Components and Projectile MotionJJ Enzon100% (1)
- Chapter IIDokumen160 halamanChapter IIJay ChavezBelum ada peringkat
- Kinematics of particles motion and equationsDokumen160 halamanKinematics of particles motion and equationsaychiluhimhailuBelum ada peringkat
- Week 9 KinematicsDokumen64 halamanWeek 9 Kinematicsiwhy_Belum ada peringkat
- CURVILINEAR MOTION COMPONENTSDokumen17 halamanCURVILINEAR MOTION COMPONENTSSekut TawarBelum ada peringkat
- Dynamics Chapter 12Dokumen26 halamanDynamics Chapter 12Sudarshan KambleBelum ada peringkat
- Chapter 12-15Dokumen59 halamanChapter 12-15Abdulaziz FarhanBelum ada peringkat
- Isu Module Subject: CE 223 and Dynamics of Rigid Bodies Continuation of Chapter 1 Topic 4 General Curvilinear MotionDokumen22 halamanIsu Module Subject: CE 223 and Dynamics of Rigid Bodies Continuation of Chapter 1 Topic 4 General Curvilinear MotioneysBelum ada peringkat
- Lect1 DynamicsDokumen28 halamanLect1 Dynamicsأميرول فاروقاBelum ada peringkat
- Kinematics of Particle MotionDokumen75 halamanKinematics of Particle MotionMuhammad Ahmad Khan LodhiBelum ada peringkat
- PE2113-Chapter 12 - Dynamics - Draft1Dokumen115 halamanPE2113-Chapter 12 - Dynamics - Draft1Mohammed AlkhalifaBelum ada peringkat
- Curvilinear Motion ComponentsDokumen19 halamanCurvilinear Motion ComponentsDeepak NarayanBelum ada peringkat
- Chapter 12 OneSlideDokumen143 halamanChapter 12 OneSlideSupper CoolBelum ada peringkat
- Dynamics: Lesson OutcomesDokumen7 halamanDynamics: Lesson OutcomesNaqib NordinBelum ada peringkat
- Normal and Tangetial ComponentsDokumen15 halamanNormal and Tangetial Componentsgear101890Belum ada peringkat
- Chap12 (3) 3Dokumen65 halamanChap12 (3) 3Vince HarrisBelum ada peringkat
- SN Sec 12-4 12-5Dokumen19 halamanSN Sec 12-4 12-5bigbangmelvanBelum ada peringkat
- King Fahd University of Petroleum & MineralsDokumen22 halamanKing Fahd University of Petroleum & MineralsAnonymous CmgstGQCIgBelum ada peringkat
- Curvilinear Motion ComponentsDokumen28 halamanCurvilinear Motion ComponentsMohamed DamraBelum ada peringkat
- Lecture 2 Curvilinear MotionDokumen87 halamanLecture 2 Curvilinear MotionDave CruzBelum ada peringkat
- CH 12Dokumen223 halamanCH 12Adeel Waqas AhmadBelum ada peringkat
- King Fahd University of Petroleum & MineralsDokumen22 halamanKing Fahd University of Petroleum & MineralsTommyVercettiBelum ada peringkat
- MET 304 Engineering AnalysisDokumen31 halamanMET 304 Engineering AnalysisOscar WangBelum ada peringkat
- Rigid Body Dynamics in Under 40Dokumen24 halamanRigid Body Dynamics in Under 40haseebtkhanBelum ada peringkat
- Introduction & Rectilinear Kinematics: Continuous Motion: Today's ObjectivesDokumen17 halamanIntroduction & Rectilinear Kinematics: Continuous Motion: Today's Objectivesجعفر السلطانBelum ada peringkat
- Dynamics Lecture3 Curvilinear Motion - Normal and Tangent ComponentsDokumen29 halamanDynamics Lecture3 Curvilinear Motion - Normal and Tangent ComponentsJJ EnzonBelum ada peringkat
- Kinematics Equations Motion GraphsDokumen33 halamanKinematics Equations Motion Graphswaheed25Belum ada peringkat
- Introduction & Rectilinear Kinematics: CONTINUOUS MOTION (Sections 12.1 - 12.2)Dokumen15 halamanIntroduction & Rectilinear Kinematics: CONTINUOUS MOTION (Sections 12.1 - 12.2)Mohamed DamraBelum ada peringkat
- 1.lecture Notes 1 - Kinematics of ParticleDokumen15 halaman1.lecture Notes 1 - Kinematics of ParticleBlack SkyBelum ada peringkat
- S S A A: Kinematics of Linear MotionDokumen28 halamanS S A A: Kinematics of Linear MotionTakiYa SaruMaruBelum ada peringkat
- PhysicsDokumen11 halamanPhysicsEthylBelum ada peringkat
- Dynamics-Ch.1 Kinematics of A Particle-Spring 2017Dokumen24 halamanDynamics-Ch.1 Kinematics of A Particle-Spring 2017Mohammed SobhiBelum ada peringkat
- Dynamics - Chapter - 2 - Kinematics - of - Particles Rectilinear Motion To Normal Tangential Coordinates PDFDokumen56 halamanDynamics - Chapter - 2 - Kinematics - of - Particles Rectilinear Motion To Normal Tangential Coordinates PDFJP NielesBelum ada peringkat
- Lecture 1 Dynamics Malik Hassan GIKIDokumen19 halamanLecture 1 Dynamics Malik Hassan GIKIMuhammad AwaisBelum ada peringkat
- Curvilinear Motion: Normal & Tangential ComponentsDokumen7 halamanCurvilinear Motion: Normal & Tangential ComponentsNaqib NordinBelum ada peringkat
- Lecture 12Dokumen37 halamanLecture 12Sarah Rachel100% (1)
- Circular Motion: Unit 6Dokumen20 halamanCircular Motion: Unit 6Nurul Afida TahirBelum ada peringkat
- Kinematics of Curved MotionDokumen43 halamanKinematics of Curved MotionBEYZA ÇAVUŞOĞLUBelum ada peringkat
- Chap4 PDFDokumen22 halamanChap4 PDFMuzamil Shah50% (2)
- Kinematics of Rigid Bodies MotionDokumen48 halamanKinematics of Rigid Bodies MotionSilas LargosBalonesBelum ada peringkat
- Rectilinear Kinematics Erratic Motion PDFDokumen28 halamanRectilinear Kinematics Erratic Motion PDFThibankumar Arumugam0% (1)
- One-Dimensional Motions ObjectivesDokumen7 halamanOne-Dimensional Motions ObjectivesMark MoralBelum ada peringkat
- Curvilinear Motion: Normal and Tangential Components: Today's ObjectivesDokumen13 halamanCurvilinear Motion: Normal and Tangential Components: Today's ObjectivesJoshBelum ada peringkat
- Circular MotionDokumen28 halamanCircular MotionPhan NingBelum ada peringkat
- Chapter 2 Motion Along A Straight LineDokumen21 halamanChapter 2 Motion Along A Straight LineAfnan Azizi100% (2)
- Curvilinear Motion: Normal and Tangential Components: Today's ObjectivesDokumen19 halamanCurvilinear Motion: Normal and Tangential Components: Today's ObjectivesrdusfsdyifuyuBelum ada peringkat
- Rectilinear Kinematics and Constant AccelerationDokumen21 halamanRectilinear Kinematics and Constant AccelerationFaIz FauziBelum ada peringkat
- Chapter 12 Kinematics of A ParticleDokumen86 halamanChapter 12 Kinematics of A ParticleDawood AbdullahBelum ada peringkat
- Kinematics of ParticleDokumen37 halamanKinematics of ParticleAriff JasniBelum ada peringkat
- W10 Kinematics of A Particle: Kns1633 Engineering Mechanics Semester 1 2011-2012 MR Abdul Azim AbdullahDokumen59 halamanW10 Kinematics of A Particle: Kns1633 Engineering Mechanics Semester 1 2011-2012 MR Abdul Azim AbdullahSek Chin JiBelum ada peringkat
- Week 1Dokumen50 halamanWeek 1Alapple TanBelum ada peringkat
- Universiti Tun Hussein Onn Malaysia: Mechanical Engineering Dynamics DDE2063 BY En. Khairulnizam Bin OthmanDokumen24 halamanUniversiti Tun Hussein Onn Malaysia: Mechanical Engineering Dynamics DDE2063 BY En. Khairulnizam Bin OthmanSuhayl AzminBelum ada peringkat
- Lecture - Intro To Dynamics & Kinematic MotionDokumen42 halamanLecture - Intro To Dynamics & Kinematic MotionSamuel Corvera100% (5)
- dynamics chp1 blackboardDokumen19 halamandynamics chp1 blackboarddmjkfloridaBelum ada peringkat
- 12.1) Introduction & Rectilinear Kinematics: Continuous MotionDokumen13 halaman12.1) Introduction & Rectilinear Kinematics: Continuous MotionSalim Bin AgilBelum ada peringkat
- Applications of Derivatives Rate of Change (Calculus) Mathematics Question BankDari EverandApplications of Derivatives Rate of Change (Calculus) Mathematics Question BankBelum ada peringkat
- Summary of Research FindingDokumen2 halamanSummary of Research FindingRabiatul AdawiahBelum ada peringkat
- Polymer ProcessingDokumen6 halamanPolymer ProcessingRabiatul AdawiahBelum ada peringkat
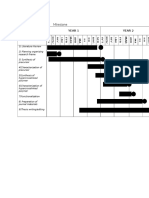
- Gantt ChartDokumen2 halamanGantt ChartRabiatul AdawiahBelum ada peringkat
- Proposal RooftopDokumen3 halamanProposal RooftopRabiatul AdawiahBelum ada peringkat
- Euw 112 Foundation English Written AssignmentDokumen5 halamanEuw 112 Foundation English Written AssignmentRabiatul AdawiahBelum ada peringkat
- COMPRESSION MOLDING OF POLYMERSDokumen8 halamanCOMPRESSION MOLDING OF POLYMERSRabiatul AdawiahBelum ada peringkat
- Lecture1 EBT324Dokumen5 halamanLecture1 EBT324Rabiatul AdawiahBelum ada peringkat
- Study SmartDokumen2 halamanStudy SmartRabiatul AdawiahBelum ada peringkat
- Lab 1 Introduction To Linux Environment and C CompilerDokumen6 halamanLab 1 Introduction To Linux Environment and C CompilerRabiatul AdawiahBelum ada peringkat
- Introduction To Electricity and Magnetism: Project PHYSNET Physics Bldg. Michigan State University East Lansing, MIDokumen6 halamanIntroduction To Electricity and Magnetism: Project PHYSNET Physics Bldg. Michigan State University East Lansing, MIp_k_soni_iit_physicsBelum ada peringkat
- A and As Level Physics Syllabus 2010Dokumen72 halamanA and As Level Physics Syllabus 2010amachqBelum ada peringkat
- Motion Along A Straight Line Straight Line: Powerpoint Lectures ForDokumen27 halamanMotion Along A Straight Line Straight Line: Powerpoint Lectures ForKiervin Paul NietesBelum ada peringkat
- EMD Question BankDokumen5 halamanEMD Question BankSfhjBelum ada peringkat
- Speed LabDokumen3 halamanSpeed LabDominick PhegleyBelum ada peringkat
- (@bohring - Bot) 09 - 12 - 2023 - SR - IIT - STAR - CO - S - @HeyitsyashXDDokumen11 halaman(@bohring - Bot) 09 - 12 - 2023 - SR - IIT - STAR - CO - S - @HeyitsyashXDmbarwani2812Belum ada peringkat
- 1 Relativity - Student Copy NewDokumen67 halaman1 Relativity - Student Copy NewJojimar JulianBelum ada peringkat
- MotionDokumen4 halamanMotionHnin NandarBelum ada peringkat
- Manual Qrod PDFDokumen17 halamanManual Qrod PDFEzequiel GuerreroBelum ada peringkat
- Hot Rod 2010 03 KrugeryoDokumen116 halamanHot Rod 2010 03 KrugeryoVictor Manuel Guillen Arroyo100% (1)
- Engineering Mechanics Questions For Online Examination (Unit - II)Dokumen14 halamanEngineering Mechanics Questions For Online Examination (Unit - II)महाजन निलेश नवनाथBelum ada peringkat
- Particle Dynamics: Vector Derivatives ExplainedDokumen25 halamanParticle Dynamics: Vector Derivatives ExplainedAvinash SinghBelum ada peringkat
- FIITJEE - (JEE-Advanced) : Physics, Chemistry & MathematicsDokumen13 halamanFIITJEE - (JEE-Advanced) : Physics, Chemistry & MathematicsSamarth AggarwalBelum ada peringkat
- Conservation of Energy Problems Worksheet 6Dokumen3 halamanConservation of Energy Problems Worksheet 6Balkis MungurBelum ada peringkat
- Path-Following Control For Aerial Manipulators Robots With Priority On EnergyDokumen17 halamanPath-Following Control For Aerial Manipulators Robots With Priority On EnergyJess OrtizBelum ada peringkat
- Lasip National High School: School: Teacher: Year and Section: Subject and Time: Date(s)Dokumen3 halamanLasip National High School: School: Teacher: Year and Section: Subject and Time: Date(s)Pepito Rosario Baniqued, JrBelum ada peringkat
- EMG 2014 Mechanics of Machines II July 2014 Class WorkDokumen3 halamanEMG 2014 Mechanics of Machines II July 2014 Class WorkCharles OndiekiBelum ada peringkat
- 8663 - Tests For AS A Level Year 1 Edexcel Stats Mechanics Expert Set A v1.1Dokumen9 halaman8663 - Tests For AS A Level Year 1 Edexcel Stats Mechanics Expert Set A v1.1Cherie ChowBelum ada peringkat
- Kinematics of ParticlesDokumen99 halamanKinematics of Particlesrevit37100% (3)
- G8-Week1-2 WorksheetDokumen6 halamanG8-Week1-2 WorksheetTeacher MelBelum ada peringkat
- NSO Class 8 Solved Paper 2014Dokumen9 halamanNSO Class 8 Solved Paper 2014NikkiBelum ada peringkat
- Motion Graphs Physics WorksheetDokumen2 halamanMotion Graphs Physics Worksheetjerald vernon torresBelum ada peringkat
- Year 9 Physics Revision ChecklistDokumen32 halamanYear 9 Physics Revision ChecklistJuan AnariBelum ada peringkat
- C.S.E. (MAIN) PHYSICS PAPER - I EXAM SOLUTIONSDokumen9 halamanC.S.E. (MAIN) PHYSICS PAPER - I EXAM SOLUTIONSRATNADEEP BANERJEEBelum ada peringkat
- Impulse and MomentumDokumen11 halamanImpulse and MomentumJohanne EdenBelum ada peringkat
- To Investigate Relationship Between Specific Energy and Depth of FlowDokumen9 halamanTo Investigate Relationship Between Specific Energy and Depth of FlowFaisal Sardar100% (12)
- Understanding The Fundamentals of Earthquake Signal Sensing NetworksDokumen11 halamanUnderstanding The Fundamentals of Earthquake Signal Sensing Networksthe stillBelum ada peringkat
- Electrical Sensors and Transducers (Carstens, 1993) BMKDokumen417 halamanElectrical Sensors and Transducers (Carstens, 1993) BMKRyan DuttBelum ada peringkat
- Course Introduction To Engineering1Dokumen5 halamanCourse Introduction To Engineering1Khanur AysahBelum ada peringkat