Anda mungkin juga menyukai
- Diode, Transistor & Fet Circuits Manual: Newnes Circuits Manual SeriesDari EverandDiode, Transistor & Fet Circuits Manual: Newnes Circuits Manual SeriesPenilaian: 4.5 dari 5 bintang4.5/5 (7)
- Singh G. CompTIA Network+ N10-008 Certification Guide... N10-008 Exam 2ed 2022Dokumen692 halamanSingh G. CompTIA Network+ N10-008 Certification Guide... N10-008 Exam 2ed 2022hazzardousmonk100% (1)
- EPM Data Sync With FDMEE 11.1.2.4Dokumen11 halamanEPM Data Sync With FDMEE 11.1.2.4Aravind AllamBelum ada peringkat
- Matlab Code For Digital Modulation TechniquesDokumen25 halamanMatlab Code For Digital Modulation TechniquesRam Murthy100% (1)
- Semiconductor Data Book: Characteristics of approx. 10,000 Transistors, FETs, UJTs, Diodes, Rectifiers, Optical Semiconductors, Triacs and SCRsDari EverandSemiconductor Data Book: Characteristics of approx. 10,000 Transistors, FETs, UJTs, Diodes, Rectifiers, Optical Semiconductors, Triacs and SCRsBelum ada peringkat
- Department of Electrical and Systems Engineering: MOSFET Amplifier Mini ProjectDokumen7 halamanDepartment of Electrical and Systems Engineering: MOSFET Amplifier Mini ProjectsadfaBelum ada peringkat
- Solution Manual For Microwave Circuit Design A Practical Approach Using Ads 1St Edition Yeom 0134086783 978013408678 Full Chapter PDFDokumen26 halamanSolution Manual For Microwave Circuit Design A Practical Approach Using Ads 1St Edition Yeom 0134086783 978013408678 Full Chapter PDFbrenda.gibeau201100% (11)
- Battle of The Giants - Comparing Kimball and InmonDokumen15 halamanBattle of The Giants - Comparing Kimball and InmonFelipe Oliveira GutierrezBelum ada peringkat
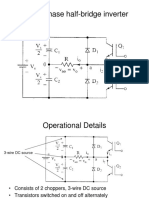
- Single Phase Half Bridge InverterDokumen29 halamanSingle Phase Half Bridge InverterGnanaseharan Arunachalam100% (1)
- DC to AC Converter (Inverter) FundamentalsDokumen15 halamanDC to AC Converter (Inverter) FundamentalsmadihaBelum ada peringkat
- Fundamentals of Microelectronics IIDokumen44 halamanFundamentals of Microelectronics IIAbrham GojjamBelum ada peringkat
- Chapter 9 Cascode Stages and Current MirrorsDokumen50 halamanChapter 9 Cascode Stages and Current MirrorsGeetBelum ada peringkat
- Fundamentals of Microelectronics IIDokumen286 halamanFundamentals of Microelectronics IIjamaldaircalBelum ada peringkat
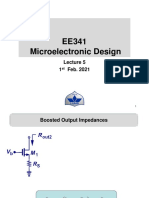
- EE341 - Lecture 5Dokumen27 halamanEE341 - Lecture 5Wala SaadehBelum ada peringkat
- 2019S Lec Ch9 CascodeStage&CurrentMirrors RevDokumen29 halaman2019S Lec Ch9 CascodeStage&CurrentMirrors Revp.비둘기폴더의비밀Belum ada peringkat
- Module 1Dokumen41 halamanModule 1Pranav ChauhanBelum ada peringkat
- Chapter 7 - CMOS AmplifiersDokumen40 halamanChapter 7 - CMOS AmplifiersAsyraf NorahairuzanBelum ada peringkat
- Mosfets As Current Sources: Analog ElectronicsDokumen22 halamanMosfets As Current Sources: Analog ElectronicsPARTH RAMANUJBelum ada peringkat
- V1 - Multistage Amplifier N Current MirrorDokumen18 halamanV1 - Multistage Amplifier N Current MirrorAshiqur Rahman ASBelum ada peringkat
- Multistage AmplifiersDokumen22 halamanMultistage AmplifiersParvinder SinghBelum ada peringkat
- Fundamentals of Microelectronics CMOS Amplifiers ChapterDokumen40 halamanFundamentals of Microelectronics CMOS Amplifiers ChapterBeverly PamanBelum ada peringkat
- Open-Circuit Time Constant Analysis: Asas As Hs K Bsbs BsDokumen24 halamanOpen-Circuit Time Constant Analysis: Asas As Hs K Bsbs BsSHAIK MUSTHAFABelum ada peringkat
- Electronic Circuit AnalysisDokumen23 halamanElectronic Circuit AnalysisAnonymous uspYoqEBelum ada peringkat
- Advanced Current Mirrors and Opamps: Hossein ShamsiDokumen45 halamanAdvanced Current Mirrors and Opamps: Hossein ShamsiChristian Montano GalvezBelum ada peringkat
- EMT182: FET Amplifier Frequency ResponseDokumen24 halamanEMT182: FET Amplifier Frequency ResponseAshraf YusofBelum ada peringkat
- Analog IC Design: Chủ đề 6: Amplifiers Differential AmplifiersDokumen80 halamanAnalog IC Design: Chủ đề 6: Amplifiers Differential AmplifiersQuang Nhật TrầnBelum ada peringkat
- Frequency Response of FETDokumen24 halamanFrequency Response of FETLai Yon Peng100% (2)
- ENG 571 - Lecture - Notes - Weeks - 10 - 11Dokumen23 halamanENG 571 - Lecture - Notes - Weeks - 10 - 11Md. Atiqul Haque ,160021010Belum ada peringkat
- ch07 PDFDokumen39 halamanch07 PDFYousef BilbeisiBelum ada peringkat
- H2PToday1806_design_TexasInstruments_Part 5Dokumen10 halamanH2PToday1806_design_TexasInstruments_Part 5lcisnydeksdtaujutlBelum ada peringkat
- R R G V V A: Fall 2000 EE 8223 Analog IC DesignDokumen4 halamanR R G V V A: Fall 2000 EE 8223 Analog IC DesignshashidharaBelum ada peringkat
- Chapter 16 CMOS AmplifiersDokumen94 halamanChapter 16 CMOS AmplifiersZenfox 2k19Belum ada peringkat
- Field Effect Transistor (FET) - PART 2Dokumen25 halamanField Effect Transistor (FET) - PART 2Iqmal HaqimBelum ada peringkat
- chapter 5+6Dokumen24 halamanchapter 5+6louischen1228Belum ada peringkat
- Report Sa Elect IIDokumen19 halamanReport Sa Elect IIjherson fortesBelum ada peringkat
- Eee3352 L3Dokumen34 halamanEee3352 L3Desmond CheweBelum ada peringkat
- Frequency-Independent Feedback Gain Affects System OscillationDokumen46 halamanFrequency-Independent Feedback Gain Affects System OscillationCHANDU PRAKASHBelum ada peringkat
- OPAMP WAVEFORM GENERATORDokumen4 halamanOPAMP WAVEFORM GENERATORLevingstan YesudhasBelum ada peringkat
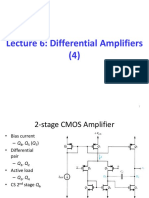
- Lecture 6: Differential AmplifiersDokumen11 halamanLecture 6: Differential AmplifiersMohammed ShifulBelum ada peringkat
- IntroductionDokumen31 halamanIntroductionWagner SilvaBelum ada peringkat
- Practical-Electronics-1973-09 Phase UnitDokumen4 halamanPractical-Electronics-1973-09 Phase UnitJohan TaalanderwijsBelum ada peringkat
- Integrated Circuits: Multistage Amplifiers, Current Sources & Current MirrorsDokumen25 halamanIntegrated Circuits: Multistage Amplifiers, Current Sources & Current MirrorsMalik JameelBelum ada peringkat
- Experiment 10: To Plot The Magnitude and Phase Response of A Third-Order Butterworth Low Pass FilterDokumen5 halamanExperiment 10: To Plot The Magnitude and Phase Response of A Third-Order Butterworth Low Pass FilterEngr. Afshan ishaq Electronics ABTBelum ada peringkat
- Tutorial Sheet DM-2 - 07.11.2023 (To Be Submitted)Dokumen4 halamanTutorial Sheet DM-2 - 07.11.2023 (To Be Submitted)amanjunejase21a1346Belum ada peringkat
- Electronics II Lecture ReviewDokumen28 halamanElectronics II Lecture ReviewrohanBelum ada peringkat
- 3 InverterDokumen55 halaman3 Inverterwqy15902896758Belum ada peringkat
- Cardinal Trem V2Dokumen11 halamanCardinal Trem V2fbsrosaBelum ada peringkat
- Adobe Scan 23-Nov-2022Dokumen4 halamanAdobe Scan 23-Nov-2022SunnyBelum ada peringkat
- Formulas 2010Dokumen2 halamanFormulas 2010Matthew PerryBelum ada peringkat
- Lec10 Diode ACDokumen24 halamanLec10 Diode ACMurali DharanBelum ada peringkat
- Eldas - PRN - Aplikasi DiodaDokumen43 halamanEldas - PRN - Aplikasi DiodanofiarozaBelum ada peringkat
- M62446AFP: 6ch Electronic Volume Control With Tone ControlDokumen19 halamanM62446AFP: 6ch Electronic Volume Control With Tone ControlahmedBelum ada peringkat
- Lab 6Dokumen5 halamanLab 6AlexandErHenríquezBelum ada peringkat
- Controlled Rectifiers GuideDokumen51 halamanControlled Rectifiers GuideVAHEESBelum ada peringkat
- Design and Implementation of VLSI SystemsDokumen55 halamanDesign and Implementation of VLSI SystemsLê Bá Phước LongBelum ada peringkat
- Transmission Line CapacitanceDokumen31 halamanTransmission Line CapacitancejcmeeBelum ada peringkat
- Dic Chapter6 1Dokumen30 halamanDic Chapter6 1subashBelum ada peringkat
- Active Loads and IC MOS AmplifiersDokumen41 halamanActive Loads and IC MOS AmplifiersKamlaBelum ada peringkat
- Electronics Ch14Dokumen22 halamanElectronics Ch14Boudi ChouBelum ada peringkat
- CMOS Low Dropout Regulator With Dynamic Zero Compensation: C.-L. Chen, W.-J. Huang and S.-I. LiuDokumen2 halamanCMOS Low Dropout Regulator With Dynamic Zero Compensation: C.-L. Chen, W.-J. Huang and S.-I. LiuharbikBelum ada peringkat
- FE 2017 - Analog ElectrDokumen58 halamanFE 2017 - Analog ElectrDomenico MereuBelum ada peringkat
- Notes 2Dokumen59 halamanNotes 2Muhammed Bekir AdamBelum ada peringkat
- 03 EEE 2210 Analog Electronics II Frequency Response of An AmplifiersDokumen34 halaman03 EEE 2210 Analog Electronics II Frequency Response of An AmplifiersyyyyBelum ada peringkat
- Electronics Devices MeaningDokumen8 halamanElectronics Devices MeaningRam MurthyBelum ada peringkat
- For IV ECE Palcement Electronic - Circuits - IIDokumen5 halamanFor IV ECE Palcement Electronic - Circuits - IIRam MurthyBelum ada peringkat
- Nomination Format Best Student AwardDokumen1 halamanNomination Format Best Student AwardRam MurthyBelum ada peringkat
- Attainment For DC ECE C JUNE16-NOV16Dokumen38 halamanAttainment For DC ECE C JUNE16-NOV16Ram MurthyBelum ada peringkat
- C NotesDokumen24 halamanC NotesRam MurthyBelum ada peringkat
- Co Po MappingDokumen38 halamanCo Po MappingRam MurthyBelum ada peringkat
- Electronics Circuits II PDFDokumen87 halamanElectronics Circuits II PDFRam MurthyBelum ada peringkat
- Co Po MappingDokumen38 halamanCo Po MappingRam MurthyBelum ada peringkat
- AP7203 ES Question PaperDokumen2 halamanAP7203 ES Question PaperRam MurthyBelum ada peringkat
- Co Attainment N Po Attainment For c3Dokumen2 halamanCo Attainment N Po Attainment For c3Ram MurthyBelum ada peringkat
- Digital Electronics or Digital (Electronic) Circuits AreDokumen11 halamanDigital Electronics or Digital (Electronic) Circuits AreRam MurthyBelum ada peringkat
- Master of Business Administration (MBA 2) : Mca - Gurmandeep@gmailDokumen26 halamanMaster of Business Administration (MBA 2) : Mca - Gurmandeep@gmailSachin KirolaBelum ada peringkat
- Ups MotherboardDokumen5 halamanUps MotherboardMustapha El MaouzouniBelum ada peringkat
- Labs: Introductio N To Spring 5 and Spring Mvc/Rest (Eclipse/Tom Cat)Dokumen34 halamanLabs: Introductio N To Spring 5 and Spring Mvc/Rest (Eclipse/Tom Cat)darwinvargas2011Belum ada peringkat
- MSI Packaging Questions: What Is Application Packaging?Dokumen33 halamanMSI Packaging Questions: What Is Application Packaging?supraja shettyBelum ada peringkat
- FoxMeyer's ERP Implementation Failure Case StudyDokumen30 halamanFoxMeyer's ERP Implementation Failure Case StudyNeo LiveBelum ada peringkat
- Marantz SR 4000 User GuideDokumen30 halamanMarantz SR 4000 User Guidekeerthipinnawala6498100% (1)
- Dir x1560 Datasheet Eu enDokumen2 halamanDir x1560 Datasheet Eu enMilosBelum ada peringkat
- Conectividad para Sistemas Industriales Jun 2018Dokumen49 halamanConectividad para Sistemas Industriales Jun 2018Cristian TorresBelum ada peringkat
- Tugas No. 1: Pengurutan AngkaDokumen11 halamanTugas No. 1: Pengurutan AngkaLia NamikazeBelum ada peringkat
- Logistics Market:: Global Industry Trends, Share, Size, Growth, Opportunity and Forecast 2019-2024Dokumen55 halamanLogistics Market:: Global Industry Trends, Share, Size, Growth, Opportunity and Forecast 2019-2024Trần Thị Hồng NgọcBelum ada peringkat
- Blockchain Systems and Their Potential Impact On Business ProcessesDokumen19 halamanBlockchain Systems and Their Potential Impact On Business ProcessesHussain MoneyBelum ada peringkat
- Click To Edit Master Title Style Crawl, Walk, RunDokumen43 halamanClick To Edit Master Title Style Crawl, Walk, RunFlavio XongasBelum ada peringkat
- Reliance Jio Internship Report on Employee MotivationDokumen51 halamanReliance Jio Internship Report on Employee MotivationSahas ShettyBelum ada peringkat
- 11 - Chapter 5Dokumen22 halaman11 - Chapter 5Parth MundhwaBelum ada peringkat
- Lyva Labs Manufacturing Cluster - SME Adoption of Advanced Manufacturing Technologies by Sujita PurushothamanDokumen10 halamanLyva Labs Manufacturing Cluster - SME Adoption of Advanced Manufacturing Technologies by Sujita Purushothamansujita.purushothamanBelum ada peringkat
- SyllabusDokumen2 halamanSyllabusBhavana NagarajBelum ada peringkat
- Teams HandbookDokumen18 halamanTeams HandbookLudi D. LunarBelum ada peringkat
- Hacking Second Life Michael ThumannDokumen14 halamanHacking Second Life Michael ThumannDanny AdonisBelum ada peringkat
- Performance: Lenovo Legion 5 Pro 16ACH6HDokumen5 halamanPerformance: Lenovo Legion 5 Pro 16ACH6HsonyBelum ada peringkat
- Courant Friedrichs LewyDokumen20 halamanCourant Friedrichs LewyEv OzcanBelum ada peringkat
- Database design fundamentalsDokumen19 halamanDatabase design fundamentalsArun Kumar T KBelum ada peringkat
- Rais12 SM CH17Dokumen23 halamanRais12 SM CH17Anton VitaliBelum ada peringkat
- Performance Evaluation of BPSK Modulation With Error Control CodingDokumen6 halamanPerformance Evaluation of BPSK Modulation With Error Control CodingSaketh RaviralaBelum ada peringkat
- Igad Policy Youth 2022 - Document 1aDokumen112 halamanIgad Policy Youth 2022 - Document 1aRICHARD BONYOBelum ada peringkat
- PDFlib TutorialDokumen258 halamanPDFlib TutorialGasBelum ada peringkat
- KPT ShapeShifterDokumen28 halamanKPT ShapeShifterLuis TovarBelum ada peringkat
- Pressure Calibrators: Low, Medium and High PressureDokumen2 halamanPressure Calibrators: Low, Medium and High PressureMarcelo PellizzaBelum ada peringkat