Anda mungkin juga menyukai
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (121)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5795)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- Doosan DBC130 Alarms ManualDokumen223 halamanDoosan DBC130 Alarms ManualDarryl Hardt100% (3)
- L&T Reference HandbookDokumen87 halamanL&T Reference HandbookAnonymous 0CnvpxS75% (4)
- Rail Transportation Safety Advisory LetterDokumen9 halamanRail Transportation Safety Advisory LetterCTV OttawaBelum ada peringkat
- Dorna AC Servo ManualDokumen189 halamanDorna AC Servo ManualShazib Shaukat SroyaBelum ada peringkat
- Stability of Power SystemDokumen11 halamanStability of Power Systemhasbi fadliBelum ada peringkat
- Kugle - Modelling and Control of A Ball-Balancing RobotDokumen290 halamanKugle - Modelling and Control of A Ball-Balancing RobotmindthomasBelum ada peringkat
- Acs 5000 BrochureDokumen24 halamanAcs 5000 BrochureRagilBelum ada peringkat
- Project Report On Pick and Place Robot (By Chirag Joshi)Dokumen37 halamanProject Report On Pick and Place Robot (By Chirag Joshi)Chirag85% (41)
- GDokumen16 halamanGproejamilBelum ada peringkat
- Question PaperDokumen6 halamanQuestion PaperPraful N KBelum ada peringkat
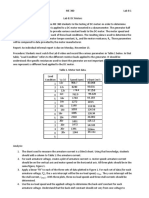
- Lab 8 - DC Motor TestingDokumen2 halamanLab 8 - DC Motor Testingvj kumarBelum ada peringkat
- Notes 1Dokumen68 halamanNotes 1Vo SantosBelum ada peringkat
- Clever Maintenance Manual 2019Dokumen28 halamanClever Maintenance Manual 2019Belal AlrwadiehBelum ada peringkat
- Tsgenco 2015Dokumen13 halamanTsgenco 2015Abbhinav SanganiBelum ada peringkat
- Industrial Gear Units For Conveyor Belts and Bucket ElevatorsDokumen16 halamanIndustrial Gear Units For Conveyor Belts and Bucket ElevatorsAnıl YavuzBelum ada peringkat
- Brochure EQ Series Electric ActuatorDokumen14 halamanBrochure EQ Series Electric ActuatorjpalauguillemBelum ada peringkat
- An Initial Sizing Methodology For Hybrid-Electric Light AircraftDokumen11 halamanAn Initial Sizing Methodology For Hybrid-Electric Light AircraftIkeaMonsterBelum ada peringkat
- Shihlin Inverter Technical Manual ANI00007Dokumen40 halamanShihlin Inverter Technical Manual ANI00007Ruiyat islamBelum ada peringkat
- Carrier 50tc17-30 en SubsDokumen16 halamanCarrier 50tc17-30 en SubsVictor FernandezBelum ada peringkat
- In House Training Report: Sant Longowal Institute of Engineering and TechnologyDokumen56 halamanIn House Training Report: Sant Longowal Institute of Engineering and Technologygaurav joshiBelum ada peringkat
- 3G3PV Series Advanced General-Purpose Inverter Users Manual - I537-E2-01 PDFDokumen320 halaman3G3PV Series Advanced General-Purpose Inverter Users Manual - I537-E2-01 PDFАлександрBelum ada peringkat
- Robot CarDokumen33 halamanRobot CarDalasa OljiraBelum ada peringkat
- 38-FFI8.5HAK TechDokumen3 halaman38-FFI8.5HAK Techmatiaschavez123Belum ada peringkat
- MSM Pamphlet 2020428Dokumen5 halamanMSM Pamphlet 2020428Aaron CorderoBelum ada peringkat
- 2-Phase Stepper-Motor Driver TLE 4728 G: Bipolar-IC FeaturesDokumen26 halaman2-Phase Stepper-Motor Driver TLE 4728 G: Bipolar-IC FeaturesMohammad RanjbarBelum ada peringkat
- Liebert Hiross HPMDokumen16 halamanLiebert Hiross HPMEdwin PortuguezBelum ada peringkat
- NK300 Series Soft Starter: ModelDokumen12 halamanNK300 Series Soft Starter: ModelEl Mouatez MessiniBelum ada peringkat
- Edriveassgnsem 7Dokumen3 halamanEdriveassgnsem 7Vaidish SumariaBelum ada peringkat
- KFS Three-Phase Alternator English PDFDokumen18 halamanKFS Three-Phase Alternator English PDFRamon Palacios0% (1)
- NEE 510-ElevatorDokumen15 halamanNEE 510-ElevatorCeejay IndayaBelum ada peringkat