Anda mungkin juga menyukai
- Motion Blur Detection and Removal in ImagesDokumen3 halamanMotion Blur Detection and Removal in ImagesInternational Journal of Innovative Science and Research TechnologyBelum ada peringkat
- Image Processing in Road Traf C AnalysisDokumen11 halamanImage Processing in Road Traf C AnalysisAshwiini Vigna BasuthkarBelum ada peringkat
- Object Motion Detection in Video Frames Using Background Frame MatchingDokumen4 halamanObject Motion Detection in Video Frames Using Background Frame MatchingseventhsensegroupBelum ada peringkat
- 0TH ReviewDokumen10 halaman0TH ReviewAkash KamalBelum ada peringkat
- Lab ManualDokumen24 halamanLab ManualASHVINI GAUTAMBelum ada peringkat
- Matlab ManualDokumen16 halamanMatlab Manualishan varshneyBelum ada peringkat
- FYPpptDokumen40 halamanFYPpptCosmk1ng Zero-1Belum ada peringkat
- 4road Damage DetectionDokumen46 halaman4road Damage DetectionAjit RajBelum ada peringkat
- Object PDFDokumen6 halamanObject PDFsudheerBelum ada peringkat
- ES 22 Lab ManualDokumen33 halamanES 22 Lab ManualRoselle Joy Dela CruzBelum ada peringkat
- Vehicle Anti Collision Using Ultrasonic SignalsDokumen22 halamanVehicle Anti Collision Using Ultrasonic SignalsAakash GuptaBelum ada peringkat
- Single Shot DetectionDokumen8 halamanSingle Shot DetectionDaniel FleuryBelum ada peringkat
- Autonomous Pedestrian Collision Avoidance Using A Fuzzy Steering ControllerDokumen12 halamanAutonomous Pedestrian Collision Avoidance Using A Fuzzy Steering ControllerSundar C EceBelum ada peringkat
- Microprocessor and Microcontrroller Module 1 - Calicut UniversityDokumen32 halamanMicroprocessor and Microcontrroller Module 1 - Calicut UniversityAshwin GopinathBelum ada peringkat
- Accident Protection System Using Electromagnetic Abs Braking SystemDokumen26 halamanAccident Protection System Using Electromagnetic Abs Braking SystemCODING CHANNELBelum ada peringkat
- Voltage Stabilizer Buying GuideDokumen5 halamanVoltage Stabilizer Buying GuideSurya Kiran KBelum ada peringkat
- Synopsis Object DetectionDokumen7 halamanSynopsis Object Detectionkartik sangBelum ada peringkat
- Research ProposalDokumen1 halamanResearch ProposalSowmitraDasBelum ada peringkat
- Road Accident Prevention Using OpenCVDokumen4 halamanRoad Accident Prevention Using OpenCVInternational Journal of Innovative Science and Research TechnologyBelum ada peringkat
- Web of Science and Web of KnowledgeDokumen10 halamanWeb of Science and Web of KnowledgenirnawulanBelum ada peringkat
- Pradeep Seminar ReportDokumen28 halamanPradeep Seminar ReportNEERAJBelum ada peringkat
- Intelligent Driving System: Bachelor of TechnologyDokumen20 halamanIntelligent Driving System: Bachelor of TechnologyRajaBelum ada peringkat
- Image Segmentation For Object Detection Using Mask R-CNN in ColabDokumen5 halamanImage Segmentation For Object Detection Using Mask R-CNN in ColabGRD JournalsBelum ada peringkat
- Traffic Object Detection Literature SurveyDokumen8 halamanTraffic Object Detection Literature SurveyperumalvigneshBelum ada peringkat
- STM32 Primer2 ManualDokumen25 halamanSTM32 Primer2 ManualRobert KovacsBelum ada peringkat
- The Concept of Crashless Cars &: Anti Collision DevicesDokumen2 halamanThe Concept of Crashless Cars &: Anti Collision Devicessourabh ChoudhuryBelum ada peringkat
- Accident DetectionDokumen35 halamanAccident DetectionAlmubeenBelum ada peringkat
- Ultrasonic Glasses For Blinds 3Dokumen19 halamanUltrasonic Glasses For Blinds 3shradha anandBelum ada peringkat
- Deep Learning in Object Detection, PDFDokumen64 halamanDeep Learning in Object Detection, PDFRaghavendra ShettyBelum ada peringkat
- Prathmesh PPT NewDokumen16 halamanPrathmesh PPT NewPrathamesh GawliBelum ada peringkat
- ARM - Module 1Dokumen67 halamanARM - Module 1Somashekar KrishnappaBelum ada peringkat
- Collision Avoidance Control With SteeringDokumen7 halamanCollision Avoidance Control With SteeringDavid MartínezBelum ada peringkat
- Avr Microcontroller ArchitectureDokumen4 halamanAvr Microcontroller ArchitectureIbrahim KhaledBelum ada peringkat
- Chapter 2 - Literature Reviews: 2.1 Application of Electronic in AutomotiveDokumen23 halamanChapter 2 - Literature Reviews: 2.1 Application of Electronic in AutomotiveMuhamad AdibBelum ada peringkat
- Classification Using Deep Learning NetworksDokumen27 halamanClassification Using Deep Learning NetworksWaheed NangigaddaBelum ada peringkat
- Object DetectionDokumen4 halamanObject DetectionnamanBelum ada peringkat
- SavengyDokumen8 halamanSavengyvikram122Belum ada peringkat
- IEEE TemplateDokumen4 halamanIEEE TemplateMujeeb AbdullahBelum ada peringkat
- Object DetectionDokumen15 halamanObject Detectionapi-3719303100% (1)
- Motion Object Detection Using Mean Square Error MethodDokumen5 halamanMotion Object Detection Using Mean Square Error MethodInternational Journal of Innovative Science and Research TechnologyBelum ada peringkat
- Matlab Lab ManualDokumen22 halamanMatlab Lab Manualticpony0% (1)
- Computer VisionDokumen41 halamanComputer VisionHarish ParuchuriBelum ada peringkat
- PIC MicrocontrollersDokumen40 halamanPIC MicrocontrollersRamaDinakaranBelum ada peringkat
- PIC MicrocontrollerDokumen26 halamanPIC MicrocontrollerK.R.Raguram100% (1)
- DHT11Dokumen3 halamanDHT11Hero AroraBelum ada peringkat
- Title in Caps (Font Size 16) : Visvesvaraya Technological University, BelagaviDokumen11 halamanTitle in Caps (Font Size 16) : Visvesvaraya Technological University, Belagavidarshan kuppaswamyBelum ada peringkat
- PIC MicrocontrollerDokumen27 halamanPIC Microcontrollermuthai100% (1)
- Microprocessor - Overview: How Does A Microprocessor Work?Dokumen8 halamanMicroprocessor - Overview: How Does A Microprocessor Work?vedavyas99Belum ada peringkat
- Object Detection Using Convolution Al Neural NetworksDokumen6 halamanObject Detection Using Convolution Al Neural NetworksAnita JaiswalBelum ada peringkat
- Object Detection and Segmentation On Tensor Flow UsingDokumen10 halamanObject Detection and Segmentation On Tensor Flow UsingspiroBelum ada peringkat
- Multithreading and Exception HandlingDokumen40 halamanMultithreading and Exception HandlingBalakrishnan.GBelum ada peringkat
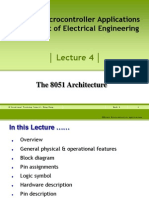
- Course Overview and 8051 Architecture Rv01Dokumen22 halamanCourse Overview and 8051 Architecture Rv01saidarao2012Belum ada peringkat
- 8051 Enhanced)Dokumen58 halaman8051 Enhanced)Vinay Nagnath Jokare100% (1)
- EMBEDDED PPTDokumen23 halamanEMBEDDED PPTArun Kumar MABelum ada peringkat
- Unit 21 PDFDokumen45 halamanUnit 21 PDFNishanth VallabhadasuBelum ada peringkat
- Unit 4 Architectural Approach For IoTDokumen14 halamanUnit 4 Architectural Approach For IoTtrupti.kodinariya98100% (1)
- PHD Research Proposal of Waqar Baig PDFDokumen11 halamanPHD Research Proposal of Waqar Baig PDFSajid GhanghroBelum ada peringkat
- MICROCONTROLLER FAMILY of PIC 18Dokumen29 halamanMICROCONTROLLER FAMILY of PIC 18Taha AssadiBelum ada peringkat
- Moving Object Tracking in Video Using MATLABDokumen5 halamanMoving Object Tracking in Video Using MATLABSumeet SauravBelum ada peringkat
- QA EA Answering DirectionsDokumen43 halamanQA EA Answering DirectionsChetan TurkaneBelum ada peringkat
- Moving Object Detection Using Matlab PDFDokumen7 halamanMoving Object Detection Using Matlab PDFChetan Turkane100% (2)
- LITERATURE SURVEY On Moving Object DetectionDokumen2 halamanLITERATURE SURVEY On Moving Object DetectionChetan Turkane100% (1)
- Effect of Technology Forecasting On Body Design of AutomobileDokumen8 halamanEffect of Technology Forecasting On Body Design of AutomobileChetan TurkaneBelum ada peringkat
- PTP BPL Bro Screen NewDokumen4 halamanPTP BPL Bro Screen NewChetan TurkaneBelum ada peringkat
- Internet Through Transmit Ion LineDokumen61 halamanInternet Through Transmit Ion LineDevendra Kumar DubeyBelum ada peringkat
- Internet Through Transmit Ion LineDokumen61 halamanInternet Through Transmit Ion LineDevendra Kumar DubeyBelum ada peringkat
- AmplifierDokumen20 halamanAmplifierValerie StraussBelum ada peringkat
- A100K10873 VSP-12-Way Technical ManualDokumen20 halamanA100K10873 VSP-12-Way Technical Manualchufta50% (2)
- Mathematicaleconomics PDFDokumen84 halamanMathematicaleconomics PDFSayyid JifriBelum ada peringkat
- WHO CDS HIV 19.8 EngDokumen24 halamanWHO CDS HIV 19.8 EngMaykel MontesBelum ada peringkat
- STEM BeesDokumen36 halamanSTEM BeesHitesh YadavBelum ada peringkat
- Su Jok, Twist Therapy AND Smile MeditationDokumen7 halamanSu Jok, Twist Therapy AND Smile MeditationprateekBelum ada peringkat
- Measure For Measure AngeloDokumen1 halamanMeasure For Measure AngeloRoger Knight100% (1)
- RegressionDokumen16 halamanRegressionchinusccBelum ada peringkat
- Carbon Facial Copies of SlidesDokumen33 halamanCarbon Facial Copies of Slides77yr72cdh6Belum ada peringkat
- Full Download Social Animal 14th Edition Aronson Test BankDokumen35 halamanFull Download Social Animal 14th Edition Aronson Test Banknaeensiyev100% (32)
- 3er Grado - DMPA 05 - ACTIVIDAD DE COMPRENSION LECTORA - UNIT 2 - CORRECCIONDokumen11 halaman3er Grado - DMPA 05 - ACTIVIDAD DE COMPRENSION LECTORA - UNIT 2 - CORRECCIONANDERSON BRUCE MATIAS DE LA SOTABelum ada peringkat
- Reflection Paper-The Elephant Man PDFDokumen1 halamanReflection Paper-The Elephant Man PDFCarlosJohn02Belum ada peringkat
- Sri Guru Parampara Stotram CompressDokumen14 halamanSri Guru Parampara Stotram CompressSatishPavurayalaBelum ada peringkat
- Donor S Tax Exam AnswersDokumen6 halamanDonor S Tax Exam AnswersAngela Miles DizonBelum ada peringkat
- Debus Medical RenaissanceDokumen3 halamanDebus Medical RenaissanceMarijaBelum ada peringkat
- Plastique: Art and EducationDokumen7 halamanPlastique: Art and EducationJackStevensonBelum ada peringkat
- The Bible Does Not Condemn Premarital SexDokumen16 halamanThe Bible Does Not Condemn Premarital SexKeith502100% (3)
- Activity Chapter1 ManagementDokumen7 halamanActivity Chapter1 ManagementTricia Amigo SacareBelum ada peringkat
- Collocations and IdiomsDokumen6 halamanCollocations and IdiomsNguyen HuyenBelum ada peringkat
- LakmeDokumen34 halamanLakmeSuraj Pratap Sawhney79% (14)
- Openfire XXMPP Server On Windows Server 2012 R2Dokumen9 halamanOpenfire XXMPP Server On Windows Server 2012 R2crobertoBelum ada peringkat
- Afia Rasheed Khan V. Mazharuddin Ali KhanDokumen6 halamanAfia Rasheed Khan V. Mazharuddin Ali KhanAbhay GuptaBelum ada peringkat
- Appellees Brief CIVILDokumen7 halamanAppellees Brief CIVILBenBulacBelum ada peringkat
- AIDA Deconstruction of Surf Excel AdDokumen6 halamanAIDA Deconstruction of Surf Excel AdRoop50% (2)
- CHAPTER 4 (B)Dokumen6 halamanCHAPTER 4 (B)Jon Lester De VeyraBelum ada peringkat
- "Shiksha Se Hi Suraksha": Literacy Campaign WeekDokumen4 halaman"Shiksha Se Hi Suraksha": Literacy Campaign WeekVaishali100% (1)
- GST 101 Exam Past QuestionsDokumen6 halamanGST 101 Exam Past QuestionsBenjamin Favour100% (2)
- The ReformationDokumen20 halamanThe ReformationIlyes FerenczBelum ada peringkat
- Chan Sophia ResumeDokumen1 halamanChan Sophia Resumeapi-568119902Belum ada peringkat
- 06 Cruz v. Dalisay, 152 SCRA 482Dokumen2 halaman06 Cruz v. Dalisay, 152 SCRA 482avatarboychrisBelum ada peringkat