Anda mungkin juga menyukai
- To Build A System To Solve A ProblemDokumen60 halamanTo Build A System To Solve A ProblemPiyush DatirBelum ada peringkat
- Problems, Problem Spaces, and SearchDokumen111 halamanProblems, Problem Spaces, and SearchdollsicecreamBelum ada peringkat
- Unit 2a PROBLEM SOLVING TECHNIQUES - Uninformed Search PDFDokumen65 halamanUnit 2a PROBLEM SOLVING TECHNIQUES - Uninformed Search PDFMadhav ChaudharyBelum ada peringkat
- L2 Prob Solving 07Dokumen30 halamanL2 Prob Solving 07Aman VermaBelum ada peringkat
- Artificial Intelligence (6CS6.2) Unit 1. A Introduction To Artificial IntelligenceDokumen52 halamanArtificial Intelligence (6CS6.2) Unit 1. A Introduction To Artificial Intelligencevishakha_18Belum ada peringkat
- Artificial Intelligence AI Notes Chapter3Dokumen18 halamanArtificial Intelligence AI Notes Chapter3Shivani RanaBelum ada peringkat
- Artificial Intelligence and Machine LearningDokumen19 halamanArtificial Intelligence and Machine LearningHIRAL AMARNATH YADAVBelum ada peringkat
- Problem Solving AIDokumen40 halamanProblem Solving AIShoaibBelum ada peringkat
- Properties of AI ProblemsDokumen65 halamanProperties of AI ProblemsUma Shankar SontakeBelum ada peringkat
- Artificial IntelligenceDokumen143 halamanArtificial IntelligenceBhuvaneshAngelsAngelsBelum ada peringkat
- Syllabus: What Is Artificial Intelligence? ProblemsDokumen66 halamanSyllabus: What Is Artificial Intelligence? ProblemsUdupiSri groupBelum ada peringkat
- Artificial IntelligenceDokumen106 halamanArtificial IntelligenceCharith RcBelum ada peringkat
- Artificial Intelligence: Unit - IDokumen30 halamanArtificial Intelligence: Unit - Ibharat jainBelum ada peringkat
- State Space Search and Heuristic Search TechniquesDokumen16 halamanState Space Search and Heuristic Search Techniques28Akshay LokhandeBelum ada peringkat
- Problem FormulationDokumen11 halamanProblem FormulationAdri JovinBelum ada peringkat
- Aml Module !Dokumen175 halamanAml Module !Amina SultanaBelum ada peringkat
- Unit2 (1) - Read-OnlyDokumen68 halamanUnit2 (1) - Read-OnlyalistersujoydsouzaBelum ada peringkat
- Chapter Three Solving Problems by Searching and Constraint SatisfactionDokumen78 halamanChapter Three Solving Problems by Searching and Constraint SatisfactionderbewBelum ada peringkat
- 1.2 Problem Solving - State Space Search (AIML)Dokumen29 halaman1.2 Problem Solving - State Space Search (AIML)Dogiparthi ManishaBelum ada peringkat
- Problems, Problem Spaces and Search: Dr. Suthikshn KumarDokumen47 halamanProblems, Problem Spaces and Search: Dr. Suthikshn Kumarssregens82Belum ada peringkat
- Lecture 3 Problems Solving by SearchingDokumen78 halamanLecture 3 Problems Solving by SearchingMd.Ashiqur RahmanBelum ada peringkat
- Lecture-3 Problems Solving by SearchingDokumen79 halamanLecture-3 Problems Solving by SearchingmusaBelum ada peringkat
- 015.search Formulation Problems Basic StrategiesDokumen121 halaman015.search Formulation Problems Basic Strategieskoolnash8784Belum ada peringkat
- Problem Solving and SearchDokumen100 halamanProblem Solving and SearchMohammad Omar FaruqBelum ada peringkat
- Problems, Problem Spaces and SearchDokumen11 halamanProblems, Problem Spaces and Searchsi89Belum ada peringkat
- AI 0ML Assignment-2Dokumen7 halamanAI 0ML Assignment-2Dileep KnBelum ada peringkat
- Chapter 3 Problem Solving AgentsDokumen69 halamanChapter 3 Problem Solving Agentshamba AbebeBelum ada peringkat
- Ai 1Dokumen12 halamanAi 1Omar GalbanBelum ada peringkat
- Chapter 06 Solving Problems by SearchingDokumen53 halamanChapter 06 Solving Problems by SearchingMuhammad HuzaifaBelum ada peringkat
- UNIT - 2:problem Solving: State-Space Search and Control StrategiesDokumen55 halamanUNIT - 2:problem Solving: State-Space Search and Control StrategiesRakeshBelum ada peringkat
- Ai Chapter 2Dokumen24 halamanAi Chapter 2d2gb6whnd9Belum ada peringkat
- Searc H: - Underlying Sub Modules in Most AI SystemsDokumen112 halamanSearc H: - Underlying Sub Modules in Most AI SystemsTanvi ChaudharyBelum ada peringkat
- Problems, Problem Spaces and Search: 1 Prof. L. B. Damahe, CT, YCCEDokumen58 halamanProblems, Problem Spaces and Search: 1 Prof. L. B. Damahe, CT, YCCEyoutube channelBelum ada peringkat
- Scope of AI Problem Solving-Lec4 - Production RulesDokumen53 halamanScope of AI Problem Solving-Lec4 - Production RulesAyush GuptaBelum ada peringkat
- Unit 2 - Part 1Dokumen67 halamanUnit 2 - Part 1Priyal PatelBelum ada peringkat
- Using Search in Problem Solving - Intro - Basic Search Techniques - Heuristic SearchDokumen39 halamanUsing Search in Problem Solving - Intro - Basic Search Techniques - Heuristic SearchNitesh MishraBelum ada peringkat
- Chapter - 2: Problem Solving: TechniquesDokumen3 halamanChapter - 2: Problem Solving: TechniquesgaurabBelum ada peringkat
- Unit I-AiDokumen31 halamanUnit I-Aigunalan gBelum ada peringkat
- IAT-I Question Paper With Solution of 18CS71 Artificial Intelligence and Machine Learning Oct-2022-Dr. Paras Nath SinghDokumen7 halamanIAT-I Question Paper With Solution of 18CS71 Artificial Intelligence and Machine Learning Oct-2022-Dr. Paras Nath SinghBrundaja D NBelum ada peringkat
- Chapter 2 Problem SolvingDokumen190 halamanChapter 2 Problem SolvingMegha GuptaBelum ada peringkat
- Search: - Underlying Sub Modules in Most AI SystemsDokumen112 halamanSearch: - Underlying Sub Modules in Most AI SystemsSheena KhannaBelum ada peringkat
- Chapter 2 Problem SolvingDokumen205 halamanChapter 2 Problem SolvingheadaidsBelum ada peringkat
- Unit 5 QBDokumen21 halamanUnit 5 QBABCDEFG HOJKLMNOPBelum ada peringkat
- State Space Search: Week 3Dokumen47 halamanState Space Search: Week 3tech surgeonsBelum ada peringkat
- Chapter Three Solving Problems by Searching and Constraint Satisfaction ProblemDokumen51 halamanChapter Three Solving Problems by Searching and Constraint Satisfaction Problemfikire belachewBelum ada peringkat
- Artificial Intelligence WINTER 2021 SOLU.Dokumen15 halamanArtificial Intelligence WINTER 2021 SOLU.VivekBelum ada peringkat
- Uninformed Search: Some Material Adopted From Notes and Slides by Marie Desjardins and Charles R. DyerDokumen56 halamanUninformed Search: Some Material Adopted From Notes and Slides by Marie Desjardins and Charles R. DyerOsaigbovo TimothyBelum ada peringkat
- Constraint Satisfaction AlgorithmDokumen22 halamanConstraint Satisfaction AlgorithmUser NameBelum ada peringkat
- Module 1Dokumen145 halamanModule 119-Arjun VMBelum ada peringkat
- What Is Artificial IntelligenceDokumen18 halamanWhat Is Artificial IntelligenceRajkumar DharmarajBelum ada peringkat
- AI NotesDokumen43 halamanAI NotesAarthiBelum ada peringkat
- 015.search Formulation Problems Basic StrategiesDokumen121 halaman015.search Formulation Problems Basic StrategiessupriyaBelum ada peringkat
- All Unit 2 Int 426Dokumen48 halamanAll Unit 2 Int 426manishsingham1000Belum ada peringkat
- Ai ch4bDokumen48 halamanAi ch4bAli Abdullah CheemaBelum ada peringkat
- Unit 1 Ci 2017Dokumen27 halamanUnit 1 Ci 2017kshpv22Belum ada peringkat
- UntitledDokumen2 halamanUntitledAli SoomroBelum ada peringkat
- Lecture - 7 - 10Dokumen97 halamanLecture - 7 - 10spandansahil15Belum ada peringkat
- U1 Production SystemsDokumen35 halamanU1 Production SystemsNatarajanBalasubramaniyanBelum ada peringkat
- AI Search STDDokumen127 halamanAI Search STDYogesh KumbhalkarBelum ada peringkat
- Introduction To Fuzzy Set TheoryDokumen67 halamanIntroduction To Fuzzy Set TheoryLini IckappanBelum ada peringkat
- Final Exam Study GuideDokumen2 halamanFinal Exam Study GuideLini IckappanBelum ada peringkat
- Puter ScienceDokumen12 halamanPuter ScienceGulzar IslamBelum ada peringkat
- Splay Trees Are Binary Search Trees (BSTS) ThatDokumen15 halamanSplay Trees Are Binary Search Trees (BSTS) ThatLini IckappanBelum ada peringkat
- 4Dokumen42 halaman4Lini IckappanBelum ada peringkat
- NreDokumen22 halamanNreLini IckappanBelum ada peringkat
- Evaluation CriteriaDokumen16 halamanEvaluation CriteriaLini IckappanBelum ada peringkat
- Subprogram (Robert Text)Dokumen109 halamanSubprogram (Robert Text)Lini IckappanBelum ada peringkat
- 04 - A Fuzzy SystemDokumen55 halaman04 - A Fuzzy SystemLini IckappanBelum ada peringkat
- BindingDokumen3 halamanBindingLini IckappanBelum ada peringkat
- Guarded CommandsDokumen9 halamanGuarded CommandsLini IckappanBelum ada peringkat
- Introduction To AIDokumen26 halamanIntroduction To AILini IckappanBelum ada peringkat
- The Design of Unix Operating System by Maurice J BachDokumen486 halamanThe Design of Unix Operating System by Maurice J Bachrakeshpm100% (5)
- The Spaghetti DiagramDokumen21 halamanThe Spaghetti DiagramBoamina Balondona AurelienBelum ada peringkat
- Uniform Cost SearchDokumen3 halamanUniform Cost SearchLini IckappanBelum ada peringkat
- PPL Module2Dokumen9 halamanPPL Module2Lini IckappanBelum ada peringkat
- PPL Module3Dokumen8 halamanPPL Module3Lini IckappanBelum ada peringkat
- PPL Module1Dokumen8 halamanPPL Module1Lini IckappanBelum ada peringkat
- PPL Module3Dokumen8 halamanPPL Module3Lini IckappanBelum ada peringkat
- PPL Module4Dokumen11 halamanPPL Module4Lini IckappanBelum ada peringkat
- Solving Problems by SearchingDokumen47 halamanSolving Problems by SearchingLini IckappanBelum ada peringkat
- Module 3 - Wireless TechnologyDokumen46 halamanModule 3 - Wireless TechnologyLini IckappanBelum ada peringkat
- Module 1Dokumen45 halamanModule 1Lini IckappanBelum ada peringkat
- PPL Module5Dokumen9 halamanPPL Module5Lini IckappanBelum ada peringkat
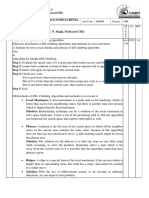
- Algorithm: Depth First SearchDokumen1 halamanAlgorithm: Depth First SearchLini IckappanBelum ada peringkat
- Constraint Satisfaction ProblemDokumen5 halamanConstraint Satisfaction ProblemLini IckappanBelum ada peringkat
- AI Problem CharacteristicsDokumen1 halamanAI Problem CharacteristicsLini IckappanBelum ada peringkat
- Unit IiiDokumen10 halamanUnit IiiLini IckappanBelum ada peringkat
- AI NotesDokumen7 halamanAI NotesLini IckappanBelum ada peringkat
- S1 Discrete Random VariablesDokumen32 halamanS1 Discrete Random VariablesEvrika EducationBelum ada peringkat
- Cambridge International AS & A Level: Further Mathematics 9231/21Dokumen16 halamanCambridge International AS & A Level: Further Mathematics 9231/21윤소리Belum ada peringkat
- Number System Conversions: Name: DateDokumen2 halamanNumber System Conversions: Name: DateAileenD.EnriquezBelum ada peringkat
- Imaginary PhysicsDokumen70 halamanImaginary PhysicsesotecBelum ada peringkat
- Finite Element Methods April May 2007 Question PaperDokumen6 halamanFinite Element Methods April May 2007 Question PaperelimelekBelum ada peringkat
- Sample Qs For MCQ TestDokumen3 halamanSample Qs For MCQ TestalishaBelum ada peringkat
- 3D Bounding Box Estimation Using Deep Learning and GeometryDokumen10 halaman3D Bounding Box Estimation Using Deep Learning and GeometryNguyễn Thành TínBelum ada peringkat
- Mixed Revision 2Dokumen4 halamanMixed Revision 2Ly ShanBelum ada peringkat
- 8 Math Square and Square RootsDokumen23 halaman8 Math Square and Square RootsAjay AnandBelum ada peringkat
- 3 Geometric ConstructionsDokumen12 halaman3 Geometric ConstructionsRashid AlmaktoumiBelum ada peringkat
- Topic 1:: CombinatoricsDokumen75 halamanTopic 1:: CombinatoricsMantas BaksysBelum ada peringkat
- Data Science Tips and Tricks To Learn Data Science Theories EffectivelyDokumen208 halamanData Science Tips and Tricks To Learn Data Science Theories Effectivelyenock-readersBelum ada peringkat
- Vaslov - Thin-Walled Elastic BeamsDokumen507 halamanVaslov - Thin-Walled Elastic Beamsdhwiersma100% (5)
- On Langmuir's Periodic Orbit: K. Cieliebak, U. Frauenfelder and M. SchwingenheuerDokumen12 halamanOn Langmuir's Periodic Orbit: K. Cieliebak, U. Frauenfelder and M. SchwingenheuerAna España CasanovaBelum ada peringkat
- Stochastic Programming - OptimizationDokumen5 halamanStochastic Programming - Optimizationipsha_djBelum ada peringkat
- Chemistry For Grade 10 BookDokumen3 halamanChemistry For Grade 10 BookHollyBelum ada peringkat
- Area Under Curve (AUC)Dokumen2 halamanArea Under Curve (AUC)Tanishq PancholiBelum ada peringkat
- Lecture03 PDFDokumen8 halamanLecture03 PDFneerajBelum ada peringkat
- Compose Decompose 2d Shapes SpedDokumen3 halamanCompose Decompose 2d Shapes Spedapi-272649638Belum ada peringkat
- Unit 4 Knowledge RepresentationDokumen13 halamanUnit 4 Knowledge Representationjskri3399Belum ada peringkat
- Rational Numbers and Long DivisionDokumen13 halamanRational Numbers and Long DivisionSJNHS SANTANBelum ada peringkat
- Nozzle Total Flow Area (TFA)Dokumen1 halamanNozzle Total Flow Area (TFA)MarcoAntonioSerranoBazanBelum ada peringkat
- Ajam 1480118 20130929 PDFDokumen3 halamanAjam 1480118 20130929 PDFAyman KamelBelum ada peringkat
- 5-2 Study Guide and Intervention: Solving Inequalities by Multiplication and DivisionDokumen2 halaman5-2 Study Guide and Intervention: Solving Inequalities by Multiplication and DivisionReham Mohamed Ahmed NoufalBelum ada peringkat
- B.tsoniff Analytical Approach To Calculation of Eigenvectors and Eigenvalues For 5x5 Impedance MatrixDokumen23 halamanB.tsoniff Analytical Approach To Calculation of Eigenvectors and Eigenvalues For 5x5 Impedance MatrixtsoniffBelum ada peringkat
- Computer Science 3A - CSC3A10/CSC03A3: Lecture 2: Arrays, Linked Lists and RecursionDokumen66 halamanComputer Science 3A - CSC3A10/CSC03A3: Lecture 2: Arrays, Linked Lists and Recursionthapelo mokoloBelum ada peringkat
- Numerical LiteracyDokumen38 halamanNumerical Literacysyikien_90Belum ada peringkat
- Linear Algebra and Its Applications - D. C. LayDokumen71 halamanLinear Algebra and Its Applications - D. C. LayKaryl VizcondeBelum ada peringkat
- Answer All Questions (40 Marks)Dokumen7 halamanAnswer All Questions (40 Marks)Rameeza YunusBelum ada peringkat
- Week 4 LAB 4 Form and SpaceDokumen5 halamanWeek 4 LAB 4 Form and SpaceAnotherKidBelum ada peringkat