Anda mungkin juga menyukai
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (399)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (894)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- SAT Digital Practice Test 1-Reading & WritingDokumen18 halamanSAT Digital Practice Test 1-Reading & WritingGulay HasanaliyevaBelum ada peringkat
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (73)
- Human Walking RoseDokumen248 halamanHuman Walking RosePablo CruzBelum ada peringkat
- PURSUIT Newsletter No. 59, Third Quarter 1982 - Ivan T. SandersonDokumen52 halamanPURSUIT Newsletter No. 59, Third Quarter 1982 - Ivan T. Sandersonufortean100% (1)
- Originof ManDokumen110 halamanOriginof ManDr-Qussai ZuriegatBelum ada peringkat
- UCSP Q1 Mod3 The Evolution and The Human PreshistoryDokumen27 halamanUCSP Q1 Mod3 The Evolution and The Human PreshistoryPETER CARLO VALDEZBelum ada peringkat
- Basic Fantasy Field Guide 3 r23Dokumen55 halamanBasic Fantasy Field Guide 3 r23steven delucaBelum ada peringkat
- Understanding Culture, Society and Politics: First Quarter Module 4 - Week 4Dokumen12 halamanUnderstanding Culture, Society and Politics: First Quarter Module 4 - Week 4Rose DiBelum ada peringkat
- Out of Eden - The Peopling of The WorldDokumen310 halamanOut of Eden - The Peopling of The WorldherybudiantoBelum ada peringkat
- Human Evolution Stages Wheel MapDokumen11 halamanHuman Evolution Stages Wheel MapNika De VeraBelum ada peringkat
- Soal Literasi Bahasa Inggris Set 1Dokumen8 halamanSoal Literasi Bahasa Inggris Set 1Simple Girl100% (1)
- Darwins Theory of EvolutionDokumen7 halamanDarwins Theory of EvolutionCatherine JacksonBelum ada peringkat
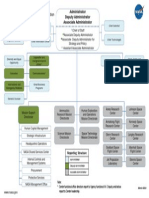
- NASA Org ChartDokumen1 halamanNASA Org ChartprasaddugadBelum ada peringkat
- Auto Biped Using PSODokumen4 halamanAuto Biped Using PSOprasaddugadBelum ada peringkat
- Essay Guidelines and SamplesDokumen23 halamanEssay Guidelines and SamplesprasaddugadBelum ada peringkat
- Issue Topics PDFDokumen26 halamanIssue Topics PDFVishesh Gunner RaimugiaBelum ada peringkat
- Autonomous Biped With Self Maneuvering AbilityDokumen14 halamanAutonomous Biped With Self Maneuvering AbilityprasaddugadBelum ada peringkat
- Argument TopicsDokumen59 halamanArgument TopicsRamchandra KasapuramBelum ada peringkat
- Autonomous Biped With Self Maneuvering AbilityDokumen14 halamanAutonomous Biped With Self Maneuvering AbilityprasaddugadBelum ada peringkat
- Autonomous Biped With Self Maneuvering AbilityDokumen14 halamanAutonomous Biped With Self Maneuvering AbilityprasaddugadBelum ada peringkat
- On the Gait of AnimalsDokumen13 halamanOn the Gait of AnimalsMaghiar Manuela PatriciaBelum ada peringkat
- Ardi: How To Create A Science Myth and How To Debunk Evolutionary Propaganda - John FeliksDokumen42 halamanArdi: How To Create A Science Myth and How To Debunk Evolutionary Propaganda - John FeliksE. ImperBelum ada peringkat
- History of Development EconomicsDokumen12 halamanHistory of Development EconomicsRose RaboBelum ada peringkat
- Raoul A Robinson - Farming and Us - History and Influence of AgricultureDokumen597 halamanRaoul A Robinson - Farming and Us - History and Influence of Agricultureskitzo1951Belum ada peringkat
- Primate LabDokumen9 halamanPrimate LabMaria PerezBelum ada peringkat
- Ape To Man Documentary TranscriptDokumen19 halamanApe To Man Documentary Transcriptmngnmg8Belum ada peringkat
- BECOMING HUMAN - Transcript 2Dokumen14 halamanBECOMING HUMAN - Transcript 2Scar ShadowBelum ada peringkat
- Ucsp ReviewerDokumen10 halamanUcsp ReviewerAeravenia Charm JayaBelum ada peringkat
- Ucsp Module 1.2Dokumen32 halamanUcsp Module 1.2Joshua Deguzman PeñarandaBelum ada peringkat
- NCERT Gist Class 11 HISTORY GRajputDokumen128 halamanNCERT Gist Class 11 HISTORY GRajputDhaval ArjunagiBelum ada peringkat
- Biped Landing Pattern Modification Method With Nonlinear Compliance ControlDokumen6 halamanBiped Landing Pattern Modification Method With Nonlinear Compliance ControlHaider NeamaBelum ada peringkat
- Hominin Lecture Typed NotesDokumen3 halamanHominin Lecture Typed NotesNicole ScottBelum ada peringkat
- 34 - Origin and Evolution of VertebratesDokumen69 halaman34 - Origin and Evolution of VertebratesZakiya HamzaBelum ada peringkat
- Design of A Bipedal Walking RobotDokumen14 halamanDesign of A Bipedal Walking RobotRaja ManeBelum ada peringkat
- 02 Padure, L. Spastic Hip in Cerebral PalsyDokumen4 halaman02 Padure, L. Spastic Hip in Cerebral PalsyminichoixBelum ada peringkat
- Human Evolution CL 2019Dokumen56 halamanHuman Evolution CL 2019Masentle MonicaBelum ada peringkat
- Human Evolution and Culture 2 FS 412Dokumen35 halamanHuman Evolution and Culture 2 FS 412Lance Addison EnriquezBelum ada peringkat
- Myles Andree Calimbo - Socsci Act2Dokumen3 halamanMyles Andree Calimbo - Socsci Act2Myles Andree CalimboBelum ada peringkat