Anda mungkin juga menyukai
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- Server Side Development:: ServletsDokumen100 halamanServer Side Development:: ServletsSahilBelum ada peringkat
- Remote Method InvocationDokumen67 halamanRemote Method InvocationwilsonraoBelum ada peringkat
- DCNnotes 1Dokumen88 halamanDCNnotes 1wilsonraoBelum ada peringkat
- Bars Sliders and SpinnersDokumen23 halamanBars Sliders and SpinnerswilsonraoBelum ada peringkat
- Java GUI: Cheng-Chia ChenDokumen145 halamanJava GUI: Cheng-Chia Chenwilsonrao100% (1)
- SwingDokumen22 halamanSwingapi-26793394Belum ada peringkat
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (399)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (121)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- Links Deep WebDokumen2 halamanLinks Deep WebArnoldTorresBelum ada peringkat
- Trane VAV Equipment SpecificationsDokumen52 halamanTrane VAV Equipment Specificationsyu4212Belum ada peringkat
- ICEpublishing Complete 2014 Books CatalogueDokumen44 halamanICEpublishing Complete 2014 Books CatalogueLamija LamyBelum ada peringkat
- Identify Challenges in Relationship Development Final AhahhaDokumen2 halamanIdentify Challenges in Relationship Development Final AhahhaKylaBelum ada peringkat
- Algorithmic Versus Human AdviceDokumen31 halamanAlgorithmic Versus Human AdviceDaqiang ChenBelum ada peringkat
- Discussion SamplesDokumen5 halamanDiscussion SamplesvusalaBelum ada peringkat
- Electrica QC Check ListDokumen21 halamanElectrica QC Check Listmakana qc100% (1)
- 06 NetNumen U31 System DescriptionDokumen39 halaman06 NetNumen U31 System Descriptionمحيي الدين الكميشى100% (1)
- VLSI Design FlowDokumen20 halamanVLSI Design FlowPranav DarganBelum ada peringkat
- Maintenance and Repair Instructions TM 124/11: Spring-Applied Sliding Caliper Brake FSG110 With Hub CenteringDokumen11 halamanMaintenance and Repair Instructions TM 124/11: Spring-Applied Sliding Caliper Brake FSG110 With Hub CenteringNik100% (1)
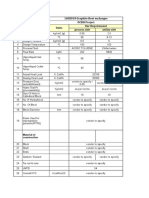
- 16HE018 Graphite Heat Exchanger DCBH Project Sr. No. Particulars Units Our Requirement Process Side Utility SideDokumen2 halaman16HE018 Graphite Heat Exchanger DCBH Project Sr. No. Particulars Units Our Requirement Process Side Utility SideBhaumik BhuvaBelum ada peringkat
- SAP ABAP ResumeDokumen3 halamanSAP ABAP Resumeshakti1392821Belum ada peringkat
- Manual New AswanDokumen18 halamanManual New AswanmohamedmosallamBelum ada peringkat
- OpenCV 3.0 Computer Vision With Java - Sample ChapterDokumen27 halamanOpenCV 3.0 Computer Vision With Java - Sample ChapterPackt PublishingBelum ada peringkat
- Passport Appointment PDFDokumen5 halamanPassport Appointment PDFRitu AgarwalBelum ada peringkat
- Company in India" DTDC Constantly Endeavours To Meet & Exceed Customers'Dokumen7 halamanCompany in India" DTDC Constantly Endeavours To Meet & Exceed Customers'Vinod KumarBelum ada peringkat
- Information Security Chapter 2 Planning For SecurityDokumen20 halamanInformation Security Chapter 2 Planning For SecurityBramara Sri100% (1)
- A Transactive Energy Future PDFDokumen6 halamanA Transactive Energy Future PDFGilberto CastrejeBelum ada peringkat
- About Indian Institute of Technology KanpurDokumen54 halamanAbout Indian Institute of Technology KanpurPooja PundeerBelum ada peringkat
- Demographic Questions: Imagineh2O'S Water Energy Nexus Prize Competition Younoodle Registration QuestionsDokumen3 halamanDemographic Questions: Imagineh2O'S Water Energy Nexus Prize Competition Younoodle Registration QuestionstmangatBelum ada peringkat
- SAP Lot Sizing ParameterDokumen1 halamanSAP Lot Sizing ParameterWilliam HolidiBelum ada peringkat
- ANTENASDokumen10 halamanANTENASGreo HernandezBelum ada peringkat
- Artificial LightingDokumen7 halamanArtificial Lightingkookie maeBelum ada peringkat
- Manual de Partes LDW1003 (6B01E0)Dokumen54 halamanManual de Partes LDW1003 (6B01E0)Enrique AssmannBelum ada peringkat
- RedBull MediaHouseDokumen15 halamanRedBull MediaHousedr989981Belum ada peringkat
- ABB REL5xx RIOConverterDokumen10 halamanABB REL5xx RIOConverterzinab90100% (1)
- Qs Iar MB PT Mega Pratama UnggulDokumen7 halamanQs Iar MB PT Mega Pratama UnggulNaufal MuljonoBelum ada peringkat
- Fenelon - Dialogues With The DeadDokumen279 halamanFenelon - Dialogues With The DeadjuanojedamenaBelum ada peringkat
- Wedding Show Proposal BaliDokumen10 halamanWedding Show Proposal BaliGirie d'PrayogaBelum ada peringkat
- Ahu-02 CavDokumen7 halamanAhu-02 CavzampacaanasBelum ada peringkat