Anda mungkin juga menyukai
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- GorillaDokumen2 halamanGorillaTom WinterBelum ada peringkat
- Table ContentDokumen1 halamanTable ContentTom WinterBelum ada peringkat
- Instant Improvements by VercettiDokumen10 halamanInstant Improvements by VercettiJ MacDaniel ContoBelum ada peringkat
- Webchapter 2Dokumen19 halamanWebchapter 2Tom WinterBelum ada peringkat
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (399)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (73)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (120)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- The Sustainable Development GoalsDokumen4 halamanThe Sustainable Development GoalsAdnan NandaBelum ada peringkat
- IFC Harnessing+Energy+From+The+Sun - FinalDokumen132 halamanIFC Harnessing+Energy+From+The+Sun - FinalHariprasad gantyalaBelum ada peringkat
- AGN 016 - Negative Phase Sequence CurrentsDokumen4 halamanAGN 016 - Negative Phase Sequence CurrentskosmitoBelum ada peringkat
- JK Paper LTD SongadhDokumen9 halamanJK Paper LTD SongadhlokririBelum ada peringkat
- 22-6800uf, 6.3v-50VDokumen4 halaman22-6800uf, 6.3v-50VPadmajan YesodharanBelum ada peringkat
- PriceListHirePurchase Normal1Dokumen55 halamanPriceListHirePurchase Normal1XeeDon ShahBelum ada peringkat
- Static Kramer Drive - T.moodleyDokumen14 halamanStatic Kramer Drive - T.moodleyThuven Moodley100% (1)
- Engine Borescope Report Jt9d - 7r SN p715094Dokumen3 halamanEngine Borescope Report Jt9d - 7r SN p715094budiarianto1965Belum ada peringkat
- Genset+Charge Discharge Bussiness Case OperationDokumen7 halamanGenset+Charge Discharge Bussiness Case OperationadisofaBelum ada peringkat
- FHTDokumen1 halamanFHTanush srinivasBelum ada peringkat
- Energetically-Optimized-Concentration of Fruit JuicesDokumen6 halamanEnergetically-Optimized-Concentration of Fruit JuicesBarat NiloyBelum ada peringkat
- Equipamiento ElectricoDokumen82 halamanEquipamiento ElectricocristianBelum ada peringkat
- Loss of Service Continuity Definitions For MV SwitchgearDokumen7 halamanLoss of Service Continuity Definitions For MV SwitchgearMohamed DarwieshBelum ada peringkat
- Retrofit Reemplazo de FAV SVX 9000Dokumen63 halamanRetrofit Reemplazo de FAV SVX 9000Enrique TorrezBelum ada peringkat
- Baylor Brake 2025BDokumen116 halamanBaylor Brake 2025BTAHRI BELGACEMBelum ada peringkat
- FICHA TÉCNICA BATERIA UCG55-12-UltracellDokumen2 halamanFICHA TÉCNICA BATERIA UCG55-12-UltracellDaniel ZuloagaBelum ada peringkat
- Experiment 17: ObjectiveDokumen5 halamanExperiment 17: ObjectiveAbdullah KhanBelum ada peringkat
- Triton Relays Normally Open Vs Normally Closed PDFDokumen2 halamanTriton Relays Normally Open Vs Normally Closed PDFMariane LopesBelum ada peringkat
- Circuit BreakerDokumen35 halamanCircuit BreakerJuan Felipe Garza GBelum ada peringkat
- Bioenergetics and ThermodynamicsDokumen10 halamanBioenergetics and Thermodynamicsfaheem ul hassanBelum ada peringkat
- Research Paper For Vortex BladelessDokumen7 halamanResearch Paper For Vortex BladelessasifBelum ada peringkat
- Control Concept For Centrifugal CompressorDokumen10 halamanControl Concept For Centrifugal CompressorSarizal Abu BakarBelum ada peringkat
- Chemistry ProjectDokumen13 halamanChemistry Projectronfratom56% (9)
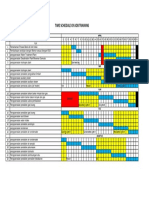
- Time Schedule On Job Training: Elemen Kompetensi AprilDokumen1 halamanTime Schedule On Job Training: Elemen Kompetensi AprilEastor Rainhard Dogma TambunanBelum ada peringkat
- Datasheet Industrial 501 KHDokumen2 halamanDatasheet Industrial 501 KHMendez FranciscoBelum ada peringkat
- THERMOCHEMISTRYDokumen75 halamanTHERMOCHEMISTRYArman SerranoBelum ada peringkat
- 15A02602 Power System Protection-2020Dokumen2 halaman15A02602 Power System Protection-2020Ramalingeswar JtBelum ada peringkat
- A Brief Idea About Automatic Process Control: Controlling What?Dokumen33 halamanA Brief Idea About Automatic Process Control: Controlling What?Shiva Kotamraju100% (1)
- Bill of Supply For Electricity: Tariff Category: Domestic (Residential)Dokumen2 halamanBill of Supply For Electricity: Tariff Category: Domestic (Residential)Bikash ShreshthaBelum ada peringkat
- Cat 3520 Gas EngineDokumen3 halamanCat 3520 Gas EngineJafarShojaBelum ada peringkat