Anda mungkin juga menyukai
- Cortex Mo Technical OverviewDokumen116 halamanCortex Mo Technical OverviewkavyaBelum ada peringkat
- MCU Architecture & Programming: An IntroductionDokumen26 halamanMCU Architecture & Programming: An IntroductionMarc Neil ApasBelum ada peringkat
- Week 02Dokumen55 halamanWeek 02aroosa naheedBelum ada peringkat
- AVRDokumen104 halamanAVRPriya GuptaBelum ada peringkat
- Lecture 1: Introduction To ARM Based Embedded SystemsDokumen24 halamanLecture 1: Introduction To ARM Based Embedded SystemsSaurabh HedaBelum ada peringkat
- Rabbit - Overview of The Rabbit 4000 Product Line & Dynamic C SoftwareDokumen62 halamanRabbit - Overview of The Rabbit 4000 Product Line & Dynamic C SoftwareJose Luis Castro AguilarBelum ada peringkat
- Control and Computer Chapter1 2013Dokumen45 halamanControl and Computer Chapter1 2013wondi BETBelum ada peringkat
- Introduction To Microcontrollers: Sistemas Embebidos Oscar Acevedo, PHDDokumen24 halamanIntroduction To Microcontrollers: Sistemas Embebidos Oscar Acevedo, PHDLuis Miguel Buelvas GarciaBelum ada peringkat
- Presentation of 8051Dokumen178 halamanPresentation of 8051sivar22Belum ada peringkat
- Introduction To Microcontrollers: Sistemas Embebidos Oscar Acevedo, PHDDokumen24 halamanIntroduction To Microcontrollers: Sistemas Embebidos Oscar Acevedo, PHDBrisman Ricardo Palacin VargasBelum ada peringkat
- 5 - Embedded SystemsDokumen53 halaman5 - Embedded Systemsحساب ويندوزBelum ada peringkat
- Es Unit1Dokumen83 halamanEs Unit1venneti kiranBelum ada peringkat
- Rabbit - Overview of The Rabbit 4000 Product Line & Dynamic C SoftwareDokumen23 halamanRabbit - Overview of The Rabbit 4000 Product Line & Dynamic C SoftwareAmr ElmestekawiBelum ada peringkat
- Arm Based MicrocontrollerDokumen27 halamanArm Based MicrocontrollerNavin Khatri100% (1)
- Week3 Microcontroller and Assembly LanguageDokumen27 halamanWeek3 Microcontroller and Assembly LanguageFelipe TeixeiraBelum ada peringkat
- Embedded System Design-PresentationDokumen120 halamanEmbedded System Design-PresentationAdarsh Prakash100% (1)
- Pic 16F877Dokumen115 halamanPic 16F877narendramaharana39100% (1)
- 1 AVR IntroductionDokumen20 halaman1 AVR Introductionsalman_azmat_666Belum ada peringkat
- CORTEXDokumen16 halamanCORTEXMarupakaBelum ada peringkat
- ARM Cortex-M3/M4 Processor Core FeaturesDokumen38 halamanARM Cortex-M3/M4 Processor Core Featuressuhaskakade0075745Belum ada peringkat
- 1 MP 8085Dokumen55 halaman1 MP 8085Jyothi SamanthulaBelum ada peringkat
- PIC18 ControllerDokumen60 halamanPIC18 ControllerDr Narayana Swamy RamaiahBelum ada peringkat
- ARM CortexDokumen20 halamanARM CortexivanmeyerBelum ada peringkat
- Unit 1 - ARM7, ARM9, ARM11 ProcessorsDokumen88 halamanUnit 1 - ARM7, ARM9, ARM11 ProcessorsKunal Khandelwal50% (2)
- Unit-1 (Module-1) : Introduction To MicrocontrollerDokumen20 halamanUnit-1 (Module-1) : Introduction To MicrocontrollerRajendra PatelBelum ada peringkat
- ED Unit-1Dokumen83 halamanED Unit-1Brij Nandan SinghBelum ada peringkat
- Renesas 8Bit Mcus: This Presentation Aim To Explain Μpd78F0714 MicrocontrollerDokumen19 halamanRenesas 8Bit Mcus: This Presentation Aim To Explain Μpd78F0714 MicrocontrollerSamah Abu SaleemBelum ada peringkat
- 02 AVR-Micro ControllerDokumen59 halaman02 AVR-Micro ControllerPriscillaBelum ada peringkat
- Introduction To System On ChipDokumen110 halamanIntroduction To System On ChipKiệt PhạmBelum ada peringkat
- 1.8051 MicrocontrollerDokumen34 halaman1.8051 MicrocontrollervanithaBelum ada peringkat
- Es Unit1Dokumen83 halamanEs Unit1venneti kiranBelum ada peringkat
- 1 - Microcontroller Vs MicroprocessorDokumen19 halaman1 - Microcontroller Vs MicroprocessorLong NguyenBelum ada peringkat
- Introduction To Embedded SystemsDokumen5 halamanIntroduction To Embedded SystemsSringaSyamBelum ada peringkat
- Module 1 - 411Dokumen43 halamanModule 1 - 411رفال الجهنيBelum ada peringkat
- Introduction To System On ChipDokumen110 halamanIntroduction To System On ChipKhBelum ada peringkat
- Distributed and Parallel Computing - Unit2Dokumen92 halamanDistributed and Parallel Computing - Unit2Apoorva RajouraBelum ada peringkat
- MD00939 2B microAptivUP DTS 01.00Dokumen21 halamanMD00939 2B microAptivUP DTS 01.00Kui MangusBelum ada peringkat
- Computer Architecture TaxonomyDokumen13 halamanComputer Architecture TaxonomySuresh VaruvelBelum ada peringkat
- ARM7 - LPC 2148 ProcessorDokumen50 halamanARM7 - LPC 2148 ProcessorHong ShaeBelum ada peringkat
- Embedded System - MicrocontrollerDokumen83 halamanEmbedded System - MicrocontrollerShrey PatnaikBelum ada peringkat
- Max DemandDokumen11 halamanMax DemanddwarakeshBelum ada peringkat
- 1 - Microcontroller VS Microprocontroller TechnologyDokumen35 halaman1 - Microcontroller VS Microprocontroller TechnologyVinnoth SrikumarBelum ada peringkat
- Core of The Embedded SystemDokumen107 halamanCore of The Embedded SystemSanskrithi TigerBelum ada peringkat
- Reduced Instruction Set ComputersDokumen30 halamanReduced Instruction Set ComputersSehrish BalochBelum ada peringkat
- Advanced Risc MachinersDokumen21 halamanAdvanced Risc MachinersAANCHALBelum ada peringkat
- Arm CortexDokumen131 halamanArm CortexPranav SinhaBelum ada peringkat
- Scalable Processor Architecture (Sparc) : Jeff Miles Joel Foster Dhruv VyasDokumen21 halamanScalable Processor Architecture (Sparc) : Jeff Miles Joel Foster Dhruv VyasMirza Jubayar TopuBelum ada peringkat
- 02 ArmDokumen53 halaman02 ArmBasudha PalBelum ada peringkat
- Elements of Embedded SystemsDokumen40 halamanElements of Embedded SystemsAsante WilliamBelum ada peringkat
- Lecture 4 - MicC-vs-CPU-PIC18Dokumen19 halamanLecture 4 - MicC-vs-CPU-PIC18Hassan ShehadiBelum ada peringkat
- Microcontroller - PPT 2. 2020Dokumen13 halamanMicrocontroller - PPT 2. 2020Irvine ChibayaBelum ada peringkat
- Core of Emb-SysDokumen52 halamanCore of Emb-SysSushrut ZemseBelum ada peringkat
- 5.1. Unit V - DSP ProcessorDokumen83 halaman5.1. Unit V - DSP ProcessorJayaram ThamizhmaniBelum ada peringkat
- Digital Signal Processor 3Dokumen25 halamanDigital Signal Processor 3Vijayaraghavan VBelum ada peringkat
- Bga900c80p30x30 2500X2500X355 Ti Fcbga CMS S-Pbga-N900 PDFDokumen298 halamanBga900c80p30x30 2500X2500X355 Ti Fcbga CMS S-Pbga-N900 PDFMohan K SBelum ada peringkat
- ESD 03 ARM ArchitectureDokumen37 halamanESD 03 ARM ArchitectureAkshay Gattu100% (1)
- Adv M 1Dokumen85 halamanAdv M 1Gerardo ValenciaBelum ada peringkat
- PLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.Dari EverandPLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.Belum ada peringkat
- Part I: Introduction To Intel 8086/8088 MicroprocessorDokumen10 halamanPart I: Introduction To Intel 8086/8088 MicroprocessorPuneeth SiddappaBelum ada peringkat
- Digital To Analog Converter Using R 2R Ladder Network and 741 Op AmpDokumen3 halamanDigital To Analog Converter Using R 2R Ladder Network and 741 Op AmpPuneeth Siddappa100% (1)
- An Ideal Comparator Compares Two Input Voltages and Produces A Logic Output Signal The Circuit Symbol For A Comparator Is Identical To The One For Op-AmpDokumen20 halamanAn Ideal Comparator Compares Two Input Voltages and Produces A Logic Output Signal The Circuit Symbol For A Comparator Is Identical To The One For Op-AmpPuneeth SiddappaBelum ada peringkat
- Advanced Communication Lab Manual PDFDokumen61 halamanAdvanced Communication Lab Manual PDFRachel BartonBelum ada peringkat
- Electric Fields and Magnetic FieldsDokumen3 halamanElectric Fields and Magnetic FieldsPuneeth SiddappaBelum ada peringkat
- Power ElectronicsDokumen20 halamanPower ElectronicsPuneeth SiddappaBelum ada peringkat
- Time Vaying FieldsDokumen16 halamanTime Vaying FieldsPuneeth SiddappaBelum ada peringkat
- Uniform Plane WaveDokumen57 halamanUniform Plane WavePuneeth SiddappaBelum ada peringkat
- MagenetostaticsDokumen43 halamanMagenetostaticsPuneeth SiddappaBelum ada peringkat
- Maxwells EquationsDokumen9 halamanMaxwells EquationsPuneeth SiddappaBelum ada peringkat
- HSCC SRH 0705 PDFDokumen1 halamanHSCC SRH 0705 PDFBhawna KapoorBelum ada peringkat
- Water Pump 250 Hrs Service No Unit: Date: HM: ShiftDokumen8 halamanWater Pump 250 Hrs Service No Unit: Date: HM: ShiftTLK ChannelBelum ada peringkat
- Top 100 Chemical CompaniesDokumen11 halamanTop 100 Chemical Companiestawhide_islamicBelum ada peringkat
- Iphone and Ipad Development TU GrazDokumen2 halamanIphone and Ipad Development TU GrazMartinBelum ada peringkat
- Shelly e CommerceDokumen13 halamanShelly e CommerceVarun_Arya_8382Belum ada peringkat
- 385C Waw1-Up PDFDokumen4 halaman385C Waw1-Up PDFJUNA RUSANDI SBelum ada peringkat
- Hazardous Locations: C.E.C. ClassificationsDokumen4 halamanHazardous Locations: C.E.C. ClassificationsThananuwat SuksaroBelum ada peringkat
- Chapter 4 - Basic ProbabilityDokumen37 halamanChapter 4 - Basic Probabilitynadya shafirahBelum ada peringkat
- Codan Rubber Modern Cars Need Modern Hoses WebDokumen2 halamanCodan Rubber Modern Cars Need Modern Hoses WebYadiBelum ada peringkat
- Alternative Network Letter Vol 7 No.1-Apr 1991-EQUATIONSDokumen16 halamanAlternative Network Letter Vol 7 No.1-Apr 1991-EQUATIONSEquitable Tourism Options (EQUATIONS)Belum ada peringkat
- Practical Modern SCADA Protocols. DNP3, 60870.5 and Related SystemsDokumen4 halamanPractical Modern SCADA Protocols. DNP3, 60870.5 and Related Systemsalejogomez200Belum ada peringkat
- Instant Download Ebook PDF Ecology Concepts and Applications 8th Edition PDF ScribdDokumen41 halamanInstant Download Ebook PDF Ecology Concepts and Applications 8th Edition PDF Scribdsteven.cross256100% (45)
- Babe Ruth Saves BaseballDokumen49 halamanBabe Ruth Saves BaseballYijun PengBelum ada peringkat
- QP 12math Term 1Dokumen11 halamanQP 12math Term 1sarthakBelum ada peringkat
- I I Formularies Laundry Commercial Liquid Detergents 110-12-020 USDokumen6 halamanI I Formularies Laundry Commercial Liquid Detergents 110-12-020 USfaissalBelum ada peringkat
- Playing With Pop-Ups - The Art of Dimensional, Moving Paper DesignsDokumen147 halamanPlaying With Pop-Ups - The Art of Dimensional, Moving Paper DesignsSara100% (4)
- Mahesh R Pujar: (Volume3, Issue2)Dokumen6 halamanMahesh R Pujar: (Volume3, Issue2)Ignited MindsBelum ada peringkat
- AssignmentDokumen47 halamanAssignmentHarrison sajorBelum ada peringkat
- Satish Gujral - FinalDokumen23 halamanSatish Gujral - Finalsatya madhuBelum ada peringkat
- The Mane Reason - UNDERSTANDING CONSUMER BEHAVIOUR TOWARDS NATURAL HAIR PRODUCTS IN GHANADokumen68 halamanThe Mane Reason - UNDERSTANDING CONSUMER BEHAVIOUR TOWARDS NATURAL HAIR PRODUCTS IN GHANAYehowadah OddoyeBelum ada peringkat
- Understanding PTS Security PDFDokumen37 halamanUnderstanding PTS Security PDFNeon LogicBelum ada peringkat
- TFGDokumen46 halamanTFGAlex Gigena50% (2)
- Pantalla MTA 100Dokumen84 halamanPantalla MTA 100dariocontrolBelum ada peringkat
- Elpodereso Case AnalysisDokumen3 halamanElpodereso Case AnalysisUsama17100% (2)
- Google Tools: Reggie Luther Tracsoft, Inc. 706-568-4133Dokumen23 halamanGoogle Tools: Reggie Luther Tracsoft, Inc. 706-568-4133nbaghrechaBelum ada peringkat
- Union Test Prep Nclex Study GuideDokumen115 halamanUnion Test Prep Nclex Study GuideBradburn Nursing100% (2)
- Smart Gas Leakage Detection With Monitoring and Automatic Safety SystemDokumen4 halamanSmart Gas Leakage Detection With Monitoring and Automatic Safety SystemYeasin Arafat FahadBelum ada peringkat
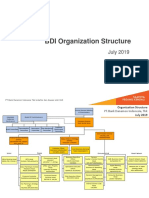
- Bank Danamon Organization ChartDokumen4 halamanBank Danamon Organization ChartFaisal Agus NugrahaBelum ada peringkat
- Trade MarkDokumen2 halamanTrade MarkRohit ThoratBelum ada peringkat
- FinalDokumen18 halamanFinalAkash LadBelum ada peringkat