Anda mungkin juga menyukai
- Introdução A Controladores Lógicos ProgramáveisDokumen40 halamanIntrodução A Controladores Lógicos ProgramáveisRafael Pereira Goncalves100% (1)
- Apostila Controles e Comandos Elétricos IndustriaisDokumen26 halamanApostila Controles e Comandos Elétricos IndustriaisTiago de Lacerda Caldas SilvaBelum ada peringkat
- Motor de Corrente ContínuaDokumen5 halamanMotor de Corrente ContínuaRenato Oliveira de NovaesBelum ada peringkat
- Trabalho Soft-StartersDokumen13 halamanTrabalho Soft-StartersDailan WelingtonBelum ada peringkat
- Circuitos de Comando e Automação 2Dokumen96 halamanCircuitos de Comando e Automação 2Claudio MarcosBelum ada peringkat
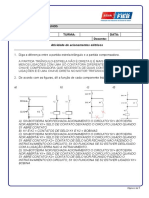
- Exercicio Comandos ElétricosDokumen2 halamanExercicio Comandos ElétricosMaisa Silva100% (2)
- CLPBÁSICODokumen117 halamanCLPBÁSICOrogallasBelum ada peringkat
- Desenvolvimento De Projetos Em Clp Ladder Baseado No Twidosuite Volume ÚnicoDari EverandDesenvolvimento De Projetos Em Clp Ladder Baseado No Twidosuite Volume ÚnicoBelum ada peringkat
- Mit - Motor de Indução TrifásicoDokumen32 halamanMit - Motor de Indução TrifásicoEfi RenanBelum ada peringkat
- Projetos Em Clp Ladder Baseado No Twidosuite Parte ViiiDari EverandProjetos Em Clp Ladder Baseado No Twidosuite Parte ViiiBelum ada peringkat
- Resolução Das Questões de AutomaçãoDokumen3 halamanResolução Das Questões de Automaçãojos luiz100% (1)
- APA 9 - Prática de Partida Com Soft StarterDokumen1 halamanAPA 9 - Prática de Partida Com Soft StarterLindo100% (1)
- Apostila Roteiros Lab Automação IndustrialDokumen80 halamanApostila Roteiros Lab Automação IndustrialJhonatan TavaresBelum ada peringkat
- Relatório 03 - 03Dokumen14 halamanRelatório 03 - 03Paloma Medeiros BaquerBelum ada peringkat
- Plano de Ensino 2 - Situação ProblemaDokumen5 halamanPlano de Ensino 2 - Situação ProblemaRobson TelesBelum ada peringkat
- Acionamento Eletronico Motores Exercicios PDFDokumen60 halamanAcionamento Eletronico Motores Exercicios PDFMarcos AraujoBelum ada peringkat
- Atividades de Acionamentos 01 - Facit - 2014 PDFDokumen5 halamanAtividades de Acionamentos 01 - Facit - 2014 PDFFelipe NicolaBelum ada peringkat
- $RPLYSLDDokumen5 halaman$RPLYSLDFelipe Caldas Ferreira dos SantosBelum ada peringkat
- Exercícios PráticosDokumen11 halamanExercícios PráticosAlex HenriqueBelum ada peringkat
- Slides Curso de PLCDokumen81 halamanSlides Curso de PLCpfalencarBelum ada peringkat
- Guia de EstudosDokumen59 halamanGuia de EstudosmoreiraviniciBelum ada peringkat
- Aula 5 - Instalação e ProgramaçãoDokumen35 halamanAula 5 - Instalação e ProgramaçãoPedro Henrique100% (1)
- 10 - Nocoes de CLPDokumen31 halaman10 - Nocoes de CLPdarlan cesar100% (1)
- Diagramas de Comando - Partida Direta - ReversãoDokumen12 halamanDiagramas de Comando - Partida Direta - ReversãoJasper Cunha0% (1)
- 2 Atividade Assíncrona - Aula 3-31-05 - 2022 WellderDokumen6 halaman2 Atividade Assíncrona - Aula 3-31-05 - 2022 WellderRamon da Cruz MartinsBelum ada peringkat
- Exemplos AutomaçãoDokumen55 halamanExemplos AutomaçãoTiago FariaBelum ada peringkat
- Atividade Motores TrifásicosDokumen2 halamanAtividade Motores TrifásicosPedro Fagundes InchaustiBelum ada peringkat
- Capítulo 3 - Autómatos ProgramáveisDokumen45 halamanCapítulo 3 - Autómatos ProgramáveisJoão Lourenço Cussondama100% (1)
- Amplificadores Operacionais e Filtros AtivosDokumen18 halamanAmplificadores Operacionais e Filtros AtivosMarcelo OliveiraBelum ada peringkat
- ContatorDokumen24 halamanContatorterebotelhoBelum ada peringkat
- Eletrotécnica PDFDokumen176 halamanEletrotécnica PDFIvanilto Martins da CruzBelum ada peringkat
- Projetos Em Clp Ladder Baseado No Twidosuite Parte ViDari EverandProjetos Em Clp Ladder Baseado No Twidosuite Parte ViBelum ada peringkat
- Exercício Comandos Elétricos Com RespostasDokumen1 halamanExercício Comandos Elétricos Com Respostasengfabio90Belum ada peringkat
- Aula 3.1 - Partes Motor, Placa, FechamentoDokumen31 halamanAula 3.1 - Partes Motor, Placa, FechamentoGUILHERME FERREIRA DOS SANTOSBelum ada peringkat
- Prova IEDokumen5 halamanProva IEDiego Junior TamiozzoBelum ada peringkat
- Lab 6 MIT Partida Direta e Chave Estrela Triangulo (Roteiro)Dokumen8 halamanLab 6 MIT Partida Direta e Chave Estrela Triangulo (Roteiro)Alecio Ribeiro Sccp100% (1)
- WEG Soft Starter SSW 03 e SSW 04 Catalogo Portugues BRDokumen12 halamanWEG Soft Starter SSW 03 e SSW 04 Catalogo Portugues BRVitor PereiraBelum ada peringkat
- Sistema de ControleDokumen10 halamanSistema de ControleMarcio Mian0% (1)
- Inversor de FreqüênciaDokumen7 halamanInversor de FreqüênciaJordany SpaccaBelum ada peringkat
- Exercicios Diodo e Retificadores VDokumen8 halamanExercicios Diodo e Retificadores VAnderson GomesBelum ada peringkat
- Partida Direta - Liga e Desliga Com Um Único BotãoDokumen3 halamanPartida Direta - Liga e Desliga Com Um Único BotãocarloscaduBelum ada peringkat
- SemáforosDokumen7 halamanSemáforosluisje0% (2)
- Se 364 PDFDokumen81 halamanSe 364 PDFCesarLimaBelum ada peringkat
- Conceitos Basicos Sobre Capacitores e IndutoresDokumen6 halamanConceitos Basicos Sobre Capacitores e IndutoresJeffer Vivendo A VidaBelum ada peringkat
- Ae (Coel) TemporizadorDokumen2 halamanAe (Coel) TemporizadorYuri MatosBelum ada peringkat
- Estudo de Diagrama LADDER Com CLP ZelioDokumen146 halamanEstudo de Diagrama LADDER Com CLP ZelioMauricio PedrosaBelum ada peringkat
- Roteiro Carga e Descarga de CapacitoresDokumen8 halamanRoteiro Carga e Descarga de CapacitoresLeandro MomentéBelum ada peringkat
- Luminotécnica - Método de LúmensDokumen56 halamanLuminotécnica - Método de LúmensEmanuel BarrosBelum ada peringkat
- Caleffi 01085 PTDokumen6 halamanCaleffi 01085 PTCleitoviskiBelum ada peringkat
- Preenchimento Do Check List para Inspeção de Subestação de Entrada de EnergiaDokumen26 halamanPreenchimento Do Check List para Inspeção de Subestação de Entrada de EnergiaCleitoviski100% (2)
- Manuseio e Movimentacao de CargasDokumen45 halamanManuseio e Movimentacao de CargasCleitoviski100% (1)
- Inspeção em Revestimento Resiba Ou BorrachaDokumen34 halamanInspeção em Revestimento Resiba Ou BorrachaCleitoviskiBelum ada peringkat
- IT - SEG.13 - Integração de Prestadores de ServiçosDokumen10 halamanIT - SEG.13 - Integração de Prestadores de ServiçosMoises MaestroBelum ada peringkat
- Criando Bibliotecas em Dev-C++Dokumen6 halamanCriando Bibliotecas em Dev-C++Tonin OliveiraBelum ada peringkat
- Análise de Circuitos Elétricos em CA Clever PereiraDokumen16 halamanAnálise de Circuitos Elétricos em CA Clever PereiratchepssilveiraBelum ada peringkat
- Ilha de Calor: Reflexões Acerca de Um ConceitoDokumen16 halamanIlha de Calor: Reflexões Acerca de Um ConceitopsrtaBelum ada peringkat
- Práticas de Auditoria-Conhecimento OrganizacionalDokumen3 halamanPráticas de Auditoria-Conhecimento OrganizacionalHélio René Lopes da RochaBelum ada peringkat
- Aulão 4.0 Ciclos de Refrigeração AutomotivaDokumen4 halamanAulão 4.0 Ciclos de Refrigeração AutomotivaLeandro CadeuBelum ada peringkat
- WAKE UP AND LIVE (TRADUÇÃO) - Bob Marley - Letras - Mus PDFDokumen2 halamanWAKE UP AND LIVE (TRADUÇÃO) - Bob Marley - Letras - Mus PDFeduardomacieldelimaBelum ada peringkat
- cONCEITOS bÁSICO fUNDAMENTOS DE BIOESTATÍSTICADokumen23 halamancONCEITOS bÁSICO fUNDAMENTOS DE BIOESTATÍSTICAcmlnagamineBelum ada peringkat
- Consultoria InternaDokumen13 halamanConsultoria InternapesselaBelum ada peringkat
- Unidade 8 - MACNA - Negociação e Administração de Conflitos-12-21Dokumen2 halamanUnidade 8 - MACNA - Negociação e Administração de Conflitos-12-21frederico fredBelum ada peringkat
- Ficha Tecnica - ACIII - PreconDokumen5 halamanFicha Tecnica - ACIII - PreconRodolfo RabeloBelum ada peringkat
- Doal Plastic - Catalogo - AGO09 - COMPLETODokumen46 halamanDoal Plastic - Catalogo - AGO09 - COMPLETOMEGAZ123Belum ada peringkat
- Ensino Da Compreensão Oral em Aulas de IdiomasDokumen12 halamanEnsino Da Compreensão Oral em Aulas de IdiomasGabriel BarrosBelum ada peringkat
- Notebook HP Pavilion dv5 Quanta qt6 Uma Rev2a PDFDokumen44 halamanNotebook HP Pavilion dv5 Quanta qt6 Uma Rev2a PDFgeorgevenczelBelum ada peringkat
- Alejandro AravenaDokumen23 halamanAlejandro AravenaEliane GalloBelum ada peringkat
- CerradoDokumen389 halamanCerradoMiguel Machado ManhãesBelum ada peringkat
- 3.máquinas de Secar RoupaDokumen2 halaman3.máquinas de Secar Roupaalienmaster999Belum ada peringkat
- Ficha 6Dokumen2 halamanFicha 6Eliane SantosBelum ada peringkat
- Centrais Térmicas A Vapor-GVDokumen137 halamanCentrais Térmicas A Vapor-GVRodolfo PalharesBelum ada peringkat
- Manual Das Antenas PDFDokumen68 halamanManual Das Antenas PDFDouglas GonçalvesBelum ada peringkat
- A Gestão Da Inovação Na EadDokumen13 halamanA Gestão Da Inovação Na EadPerguntasBelum ada peringkat
- Teoria Clássica Da Administração 2Dokumen34 halamanTeoria Clássica Da Administração 2AlvoErrado2100% (1)
- Planilha para EletricaDokumen6 halamanPlanilha para EletricaRoger ISiBelum ada peringkat
- Paul Halmos PDFDokumen16 halamanPaul Halmos PDFgenilsonmatBelum ada peringkat
- Baterias de Íons de Sódio Prontas para o MercadoDokumen4 halamanBaterias de Íons de Sódio Prontas para o Mercado@nanesojBelum ada peringkat
- Catálogo Peças V3 2019 ReafrioDokumen48 halamanCatálogo Peças V3 2019 ReafrioCarlosBelum ada peringkat
- Gestão de PessoasDokumen76 halamanGestão de PessoassouseuBelum ada peringkat
- BM 3001 PTDokumen1 halamanBM 3001 PTHFBelum ada peringkat
- TT Sae 1045Dokumen13 halamanTT Sae 1045Giba Gilberto JuniorBelum ada peringkat
- Produção 2 - Lista de Funções Na Produção CinematográficaDokumen8 halamanProdução 2 - Lista de Funções Na Produção CinematográficaKarla NoronhaBelum ada peringkat