Anda mungkin juga menyukai
- A A JIMOH NewDokumen49 halamanA A JIMOH NewOlawale John Adeoti100% (1)
- CPB 30004 - CHAPTER 1 - INTRO Sept 2014Dokumen52 halamanCPB 30004 - CHAPTER 1 - INTRO Sept 2014Ashwin MBelum ada peringkat
- VSC-Based HVDC Link: To Allow Further Modifications To The Original System. This Model ShownDokumen38 halamanVSC-Based HVDC Link: To Allow Further Modifications To The Original System. This Model ShownleslyBelum ada peringkat
- Towards Functional Safety in Drive-By Wire Vehicles by Peter Johannes BergmillerDokumen236 halamanTowards Functional Safety in Drive-By Wire Vehicles by Peter Johannes BergmillerAimee HallBelum ada peringkat
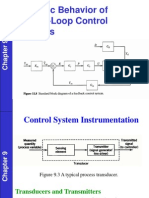
- Control System Instrumentation: Transducers and TransmittersDokumen7 halamanControl System Instrumentation: Transducers and Transmitters李承家Belum ada peringkat
- Chapter 9 ChangDokumen37 halamanChapter 9 Changsatya sagarBelum ada peringkat
- Control System Instrumentation: Transducers and TransmittersDokumen25 halamanControl System Instrumentation: Transducers and TransmittersKate SongBelum ada peringkat
- ERT 321 Process Control & DynamicsDokumen49 halamanERT 321 Process Control & Dynamicshakita86Belum ada peringkat
- Chapter 9.simulation ControlDokumen24 halamanChapter 9.simulation ControlAudrey Patrick KallaBelum ada peringkat
- Chapter 9 - InstrumentationDokumen18 halamanChapter 9 - InstrumentationAdner RomeroBelum ada peringkat
- Control Chapter 5 - RemoteDokumen87 halamanControl Chapter 5 - RemoteJhonny PerezBelum ada peringkat
- Dynamic Behavior of Closed-Loop Control SystemsDokumen24 halamanDynamic Behavior of Closed-Loop Control SystemsBhowmickBelum ada peringkat
- ChE 404-Chapter 08Dokumen38 halamanChE 404-Chapter 08aliBelum ada peringkat
- Control DynamicDokumen10 halamanControl Dynamicكرار نعيم100% (1)
- Cuk Control PDFDokumen57 halamanCuk Control PDFPraveen PJBelum ada peringkat
- Presentation For ControllerDokumen42 halamanPresentation For ControllerAlakshendra JohariBelum ada peringkat
- Control Chapter 5 - RemoteDokumen86 halamanControl Chapter 5 - RemoteWilmar Antonio Zuluaga ArangoBelum ada peringkat
- KMM411E - Lesson7a - Feedback Controllers - 14nov2022Dokumen56 halamanKMM411E - Lesson7a - Feedback Controllers - 14nov2022hairen jegerBelum ada peringkat
- Instrumentation Process 2014.12.31 PDFDokumen14 halamanInstrumentation Process 2014.12.31 PDFFadlul RamadhanBelum ada peringkat
- Controller PrincipleDokumen24 halamanController PrinciplePortia ShilengeBelum ada peringkat
- Unit 3Dokumen67 halamanUnit 3Raghul T100% (1)
- Closed Loop Control System (CSL - 04) : Technical Manual FORDokumen19 halamanClosed Loop Control System (CSL - 04) : Technical Manual FORAAYUSH KUMARBelum ada peringkat
- PB Vs GainDokumen6 halamanPB Vs Gainابزار دقیقBelum ada peringkat
- PDC Chapter 8Dokumen49 halamanPDC Chapter 8satya sagarBelum ada peringkat
- Project Report On OPDokumen13 halamanProject Report On OPVarun PathaniaBelum ada peringkat
- Chapter 9Dokumen17 halamanChapter 9Sagar PawarBelum ada peringkat
- Chap1 Indus ElectronicsDokumen47 halamanChap1 Indus ElectronicsSantosh Kumar BejugamBelum ada peringkat
- Control System InstrumentationDokumen88 halamanControl System Instrumentationyeay_meBelum ada peringkat
- Chapter 1 Introduction Control SysDokumen52 halamanChapter 1 Introduction Control SysHaliza MatsaniBelum ada peringkat
- Implementation of LCC HVDC Converter TransformerDokumen6 halamanImplementation of LCC HVDC Converter Transformerdhuamani01Belum ada peringkat
- Process Dynamics and Control: Chapter 8 LecturesDokumen33 halamanProcess Dynamics and Control: Chapter 8 LecturesMuhaiminul IslamBelum ada peringkat
- Process Control CHP 5Dokumen29 halamanProcess Control CHP 5dododoorBelum ada peringkat
- Control Engineering I PDFDokumen15 halamanControl Engineering I PDFkipkorir kemboiBelum ada peringkat
- Feedback Controllers: Figure 8.1 Schematic Diagram For A Stirred-Tank Blending SystemDokumen18 halamanFeedback Controllers: Figure 8.1 Schematic Diagram For A Stirred-Tank Blending Systeml7aniBelum ada peringkat
- EE 322 Control TheoryDokumen37 halamanEE 322 Control TheoryshrnbolonneBelum ada peringkat
- Chapter 5Dokumen39 halamanChapter 5Portia ShilengeBelum ada peringkat
- LM2907Dokumen21 halamanLM2907leorio88Belum ada peringkat
- Lecture 1011 TeamDokumen70 halamanLecture 1011 TeamAmitav BaruaBelum ada peringkat
- TLE7242G-TLE8242-2L+-Application-Note KP KI V2 0Dokumen13 halamanTLE7242G-TLE8242-2L+-Application-Note KP KI V2 0Larbi_Lakrout_7056Belum ada peringkat
- ME6702 NotesDokumen62 halamanME6702 NotesKanda SamyBelum ada peringkat
- Wcecs2009 - pp545-549 Computer LoadsDokumen5 halamanWcecs2009 - pp545-549 Computer LoadsYogesh MsdBelum ada peringkat
- Process Gain and Loop Gain: Ma Output Ma CS Input F FDokumen5 halamanProcess Gain and Loop Gain: Ma Output Ma CS Input F FNeeraj JagtapBelum ada peringkat
- Chapter 8 - Feedback ControllerDokumen35 halamanChapter 8 - Feedback ControllerFakhrulShahrilEzanieBelum ada peringkat
- One Cycle ControlDokumen9 halamanOne Cycle ControlNithin SebastianBelum ada peringkat
- Practical Feedback Loop Design Considerations For Switched Mode Power SuppliesDokumen14 halamanPractical Feedback Loop Design Considerations For Switched Mode Power SuppliesDiego PhillipeBelum ada peringkat
- Water Flow Control System V2 PDFDokumen12 halamanWater Flow Control System V2 PDFAayushSrivastava100% (1)
- Optimizing The Load Transient Response of The Buck ConverterDokumen7 halamanOptimizing The Load Transient Response of The Buck ConverterNéstor BernalBelum ada peringkat
- BUCK Driver: MicroprocessorDokumen9 halamanBUCK Driver: MicroprocessorMehroz KhanBelum ada peringkat
- BUCK Driver: MicroprocessorDokumen9 halamanBUCK Driver: MicroprocessorMehroz KhanBelum ada peringkat
- Basic Concept of Process Control SystemDokumen29 halamanBasic Concept of Process Control Systemhabtemariam mollaBelum ada peringkat
- 2255-1 ManualDokumen6 halaman2255-1 Manualgloriyeah2003Belum ada peringkat
- DR20Dokumen136 halamanDR20Daryl Asto MercadoBelum ada peringkat
- Process Control CHP5Dokumen29 halamanProcess Control CHP5Martha AlbaBelum ada peringkat
- Function Generator Op-Amp Summing Circuits Pulse Width Modulation LM311 ComparatorDokumen7 halamanFunction Generator Op-Amp Summing Circuits Pulse Width Modulation LM311 ComparatorMuhammad JunaidBelum ada peringkat
- CLL 361 Instrumentation & Automation: Munawar A. ShaikDokumen28 halamanCLL 361 Instrumentation & Automation: Munawar A. ShaikRakeshKumarBelum ada peringkat
- Figure 2-6 Block Diagram of An Industrial Control System, Which Consists of An Automatic Controller, AnDokumen6 halamanFigure 2-6 Block Diagram of An Industrial Control System, Which Consists of An Automatic Controller, AnTaufiq RizkiBelum ada peringkat
- Week 10-Feedback ControlDokumen34 halamanWeek 10-Feedback ControlMohd Aizad100% (1)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Dari EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Penilaian: 2.5 dari 5 bintang2.5/5 (3)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Dari EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Belum ada peringkat
- PNEUMATICS AND AIR CIRCUITS UNDERSTANDING THE CASCADE VALVE AND PLC UNDERSTANDINGDari EverandPNEUMATICS AND AIR CIRCUITS UNDERSTANDING THE CASCADE VALVE AND PLC UNDERSTANDINGBelum ada peringkat
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlDari EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlPenilaian: 5 dari 5 bintang5/5 (1)
- Marketing Management Paper IIIDokumen209 halamanMarketing Management Paper IIIOrange IntentionsBelum ada peringkat
- GUIDELINES For "Generate Description From Query" Task: Judging ProcessDokumen1 halamanGUIDELINES For "Generate Description From Query" Task: Judging ProcessrichyBelum ada peringkat
- HK 1210 As1 - 20221110Dokumen2 halamanHK 1210 As1 - 20221110rozzaq dhmgroupBelum ada peringkat
- HK 1210 As1 - 20221110Dokumen2 halamanHK 1210 As1 - 20221110rozzaq dhmgroupBelum ada peringkat
- Mercy PrayerDokumen2 halamanMercy PrayerOlawale John AdeotiBelum ada peringkat
- 2015caterpiller BrochureDokumen40 halaman2015caterpiller BrochureSureshkumar Kulanthai VeluBelum ada peringkat
- Information Guide: CAT Dealer Prep ProgramDokumen18 halamanInformation Guide: CAT Dealer Prep ProgramOlawale John AdeotiBelum ada peringkat
- 139703Dokumen1 halaman139703Olawale John AdeotiBelum ada peringkat
- 14384EN TIH030mDokumen2 halaman14384EN TIH030mMickey Estremera EstilleroBelum ada peringkat
- HD1759 Io9q CAED n25 19Dokumen7 halamanHD1759 Io9q CAED n25 19Olawale John AdeotiBelum ada peringkat
- Generator Fundamentals OutlineDokumen3 halamanGenerator Fundamentals OutlineOlawale John AdeotiBelum ada peringkat
- SL045016-D-PP: Cylindrical Roller BearingDokumen2 halamanSL045016-D-PP: Cylindrical Roller BearingOlawale John AdeotiBelum ada peringkat
- Linkedin Checklist: Photo Background Image Url HeadlineDokumen2 halamanLinkedin Checklist: Photo Background Image Url HeadlineOlawale John AdeotiBelum ada peringkat
- Your Study Contract: Olawale Adeoti 70 Makaranta Street, Ugwan Yelwa Kaduna 70 NGDokumen5 halamanYour Study Contract: Olawale Adeoti 70 Makaranta Street, Ugwan Yelwa Kaduna 70 NGOlawale John AdeotiBelum ada peringkat
- Nigerian Breweries PLC Rating Report GCR April 2022 ExpiryDokumen9 halamanNigerian Breweries PLC Rating Report GCR April 2022 ExpiryOlawale John AdeotiBelum ada peringkat
- The SKF Microlog Series Catalogue: The Industry's Premier Portable, Handheld Data Collector and AnalyzerDokumen24 halamanThe SKF Microlog Series Catalogue: The Industry's Premier Portable, Handheld Data Collector and AnalyzerOlawale John AdeotiBelum ada peringkat
- SKF Microlog Analyzer Accessories CatalogDokumen48 halamanSKF Microlog Analyzer Accessories CatalogOlawale John Adeoti100% (1)
- SKF SYSTEM 24 Magazine Article - 012726Dokumen7 halamanSKF SYSTEM 24 Magazine Article - 012726Olawale John AdeotiBelum ada peringkat
- SKF PullersDokumen19 halamanSKF PullersOlawale John AdeotiBelum ada peringkat
- Ahmadu Bello University, Zaria: NA NA NA 2 NA NA NA NA NA NA NA NADokumen2 halamanAhmadu Bello University, Zaria: NA NA NA 2 NA NA NA NA NA NA NA NAOlawale John AdeotiBelum ada peringkat
- TB117Dokumen74 halamanTB117garycwkBelum ada peringkat
- SKF SYSTEM 24 Single Point Automatic Lubricator LAGD 125 and LAGD 60 - 012732Dokumen3 halamanSKF SYSTEM 24 Single Point Automatic Lubricator LAGD 125 and LAGD 60 - 012732Olawale John AdeotiBelum ada peringkat
- DDDDDDokumen2 halamanDDDDDOlawale John AdeotiBelum ada peringkat
- Nigeria Immigration ServiceDokumen1 halamanNigeria Immigration ServiceOlawale John AdeotiBelum ada peringkat
- Ahmadu Bello University: Payer InformationDokumen1 halamanAhmadu Bello University: Payer InformationOlawale John AdeotiBelum ada peringkat
- ProposalDokumen4 halamanProposalOlawale John AdeotiBelum ada peringkat
- Mmen503 NewDokumen26 halamanMmen503 NewOlawale John AdeotiBelum ada peringkat
- My ResultDokumen4 halamanMy ResultOlawale John AdeotiBelum ada peringkat
- Cover Page1Dokumen2 halamanCover Page1Olawale John AdeotiBelum ada peringkat
- Control Systems BasicsDokumen17 halamanControl Systems BasicsKaushal FaujdarBelum ada peringkat
- Control System NOTESDokumen9 halamanControl System NOTESSTUDENTS OF DOE CUSATBelum ada peringkat
- Eurotherm 2216 LDokumen12 halamanEurotherm 2216 LluisBelum ada peringkat
- Instrumentation Training Courses 2015 PDFDokumen9 halamanInstrumentation Training Courses 2015 PDFshareyhouBelum ada peringkat
- M.E. MechatronicsDokumen59 halamanM.E. MechatronicsSadursh DarshanBelum ada peringkat
- IET Publishing Catalogue 2011 3mbDokumen44 halamanIET Publishing Catalogue 2011 3mbme_vahabiBelum ada peringkat
- Saep 1624Dokumen26 halamanSaep 1624Anonymous 4IpmN7OnBelum ada peringkat
- 13 - Digital Controller DesignDokumen22 halaman13 - Digital Controller DesignEverton CollingBelum ada peringkat
- Debashis Chatterjee, J. S. Lather, Lalita Gupta-Wiley Acing The Gate - Electrical Engineering-Wiley India (2016) PDFDokumen1.225 halamanDebashis Chatterjee, J. S. Lather, Lalita Gupta-Wiley Acing The Gate - Electrical Engineering-Wiley India (2016) PDFpoulomi ganguly100% (1)
- Control Systems Control Systems Control Systems Control SystemsDokumen44 halamanControl Systems Control Systems Control Systems Control Systemsyapacagınız sıteyı s..Belum ada peringkat
- Model-Based Development and Simulation For Robotic Systems With Sysml, Simulink and Simscape ProfilesDokumen12 halamanModel-Based Development and Simulation For Robotic Systems With Sysml, Simulink and Simscape ProfilesredwaneBelum ada peringkat
- Lec 23Dokumen26 halamanLec 23SantoshBelum ada peringkat
- Twido Programmable Controller: PresentationDokumen6 halamanTwido Programmable Controller: PresentationВикторBelum ada peringkat
- ME 464 Exam Paper Final-VettedDokumen5 halamanME 464 Exam Paper Final-VettedSaad RasheedBelum ada peringkat
- Control Systems U5 (TEL306)Dokumen84 halamanControl Systems U5 (TEL306)Ruvenderan SuburamaniamBelum ada peringkat
- Bode PlotDokumen49 halamanBode PlotKart HikBelum ada peringkat
- Control System Examples - CH 1 - 7 - Sept 2017Dokumen411 halamanControl System Examples - CH 1 - 7 - Sept 2017Karthick PN0% (1)
- MEV2000 enDokumen169 halamanMEV2000 enEric100% (19)
- Control Systems U3 (TEL306)Dokumen84 halamanControl Systems U3 (TEL306)Ruvenderan SuburamaniamBelum ada peringkat
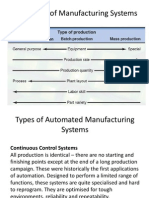
- Automated Manufacturing SystemsDokumen25 halamanAutomated Manufacturing SystemsSoto KunBelum ada peringkat
- Feedback Amplifiers: Feedback Factor Feedback Signal/input SignalDokumen15 halamanFeedback Amplifiers: Feedback Factor Feedback Signal/input Signalshantanu kumar BaralBelum ada peringkat
- Robust Smith Predictor Design For Time-DDokumen7 halamanRobust Smith Predictor Design For Time-DDimitris IracleousBelum ada peringkat
- Study On Application of Value Engineering On Construction DesignDokumen4 halamanStudy On Application of Value Engineering On Construction DesignAhmed JeddaweeBelum ada peringkat
- Atoms BDokumen293 halamanAtoms Brashm006ranjanBelum ada peringkat
- Retrofit Mechanical PressDokumen6 halamanRetrofit Mechanical PressAdailton FreitasBelum ada peringkat
- MIDTERM Reviewer - Process ControlDokumen192 halamanMIDTERM Reviewer - Process ControlPatricia ManabatBelum ada peringkat
- Basic Concept of Process Control SystemDokumen29 halamanBasic Concept of Process Control Systemhabtemariam mollaBelum ada peringkat
- Coupled TanksDokumen32 halamanCoupled TanksAnkur MondalBelum ada peringkat
- ATC 880 Manual PDFDokumen94 halamanATC 880 Manual PDFJessé CunhaBelum ada peringkat