Anda mungkin juga menyukai
- Btm... How Escalator WorksDokumen9 halamanBtm... How Escalator WorksNiranjan KhambeteBelum ada peringkat
- CTBUH Height CriteriaDokumen7 halamanCTBUH Height CriteriaAr SoniBelum ada peringkat
- Speaker TOADokumen4 halamanSpeaker TOASenoPati KudusBelum ada peringkat
- 2384 Case Study Kingdom Tower JeddahDokumen9 halaman2384 Case Study Kingdom Tower JeddahAlaa W TonsyBelum ada peringkat
- Metode Pelaksanaan Konstruksi High Rise Building PDFDokumen109 halamanMetode Pelaksanaan Konstruksi High Rise Building PDFade4stand4vilgoBelum ada peringkat
- Organisasi RuangDokumen7 halamanOrganisasi RuangMikael ChristianBelum ada peringkat
- Menghitung Kebutuhan Lift PDFDokumen4 halamanMenghitung Kebutuhan Lift PDFDimas PrayogaBelum ada peringkat
- Producing High Quality PC ProductsDokumen8 halamanProducing High Quality PC Productsfarouqi fazaBelum ada peringkat
- CCTV Building Cantilever StructuresDokumen8 halamanCCTV Building Cantilever StructuresSameer Ali100% (1)
- Analysis of Plane Trusses and Frames: DR SuwitoDokumen28 halamanAnalysis of Plane Trusses and Frames: DR SuwitoAbhinandan SharmaBelum ada peringkat
- Mori TowerDokumen14 halamanMori TowerHilal To100% (1)
- Apartemen Dengan Pendekatan Desain Biophilik DI Jakarta SelatanDokumen7 halamanApartemen Dengan Pendekatan Desain Biophilik DI Jakarta SelatanKatya ChernyBelum ada peringkat
- Metodologi Slo PLTMHDokumen4 halamanMetodologi Slo PLTMHAchsanul KhabibBelum ada peringkat
- KELOMPOK 12 - UTSPA3 - Perancangan Cafe Resto and Cottage Pada Lahan Berkontur FIX PDFDokumen194 halamanKELOMPOK 12 - UTSPA3 - Perancangan Cafe Resto and Cottage Pada Lahan Berkontur FIX PDFNadhira putri EkaBelum ada peringkat
- Report-High Rise Cantilever - NISHITA AGRAWALDokumen30 halamanReport-High Rise Cantilever - NISHITA AGRAWALNishita AgrawalBelum ada peringkat
- Kuwait's Al Hamra Tower: A Sculpted Skyscraper IconDokumen58 halamanKuwait's Al Hamra Tower: A Sculpted Skyscraper IconAcintyaHapsari100% (4)
- Site Survey, Excavation, Pile Driving, Footing Formwork, Column, Pier HeadDokumen6 halamanSite Survey, Excavation, Pile Driving, Footing Formwork, Column, Pier Headdiesel headBelum ada peringkat
- The Philips Pavilion - A Revolutionary StructureDokumen12 halamanThe Philips Pavilion - A Revolutionary StructureNiket PaiBelum ada peringkat
- Buttressed CoreDokumen28 halamanButtressed CoreAnjuBelum ada peringkat
- Advanced Services: Elevators & EscalatorsDokumen38 halamanAdvanced Services: Elevators & Escalatorsdeekshitha markolluBelum ada peringkat
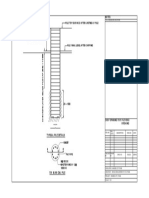
- Shop Drawing of Pile Head Breaking PDFDokumen1 halamanShop Drawing of Pile Head Breaking PDFMonali VarpeBelum ada peringkat
- Aluplus Catalog Final PDFDokumen19 halamanAluplus Catalog Final PDFMiguel Prabowo Dos SantosBelum ada peringkat
- BMW Museum A Symbol of German Contemporary High-TechDokumen14 halamanBMW Museum A Symbol of German Contemporary High-TechElizabeth MercyBelum ada peringkat
- Structural Design and Construction of The Foundation of Tokyo Sky TreeDokumen12 halamanStructural Design and Construction of The Foundation of Tokyo Sky TreeKaung Htet100% (1)
- B 28 FDokumen1 halamanB 28 FsereBelum ada peringkat
- Building Envelope Materials and Joint SystemsDokumen63 halamanBuilding Envelope Materials and Joint SystemsNraisyahaldaf100% (1)
- Vienna ModernDokumen85 halamanVienna ModernZain ZulfiqarBelum ada peringkat
- 2014 Jacquard tc207 Foundations by Prestressing Anchors of The "Villa Mediterranee enDokumen5 halaman2014 Jacquard tc207 Foundations by Prestressing Anchors of The "Villa Mediterranee enLucas HoodBelum ada peringkat
- Shenzhen Bao'an International Airport, ChinaDokumen8 halamanShenzhen Bao'an International Airport, ChinaSonit NemaBelum ada peringkat
- Hearst Tower Feb 06Dokumen0 halamanHearst Tower Feb 06denis1808scribdBelum ada peringkat
- Greenship+new+building+2010+versi+1 0Dokumen120 halamanGreenship+new+building+2010+versi+1 0Yuki FadilahBelum ada peringkat
- Analisis K3 Pada Lift Dan Eskalator Di Galaxy Mall SurabayaDokumen23 halamanAnalisis K3 Pada Lift Dan Eskalator Di Galaxy Mall SurabayaRogandaBelum ada peringkat
- Zhang LinDokumen120 halamanZhang LinNicholas Chin Yong LekBelum ada peringkat
- Teknologi Bangunan: The British Museum, Hearst Headquarter Dan Bank of China TowerDokumen10 halamanTeknologi Bangunan: The British Museum, Hearst Headquarter Dan Bank of China TowerAmanda Putri100% (1)
- N X y Dy/dx: Euler'S MethodDokumen12 halamanN X y Dy/dx: Euler'S MethodOmen JettBelum ada peringkat
- Presentation-Case Study of Shanghai Tower 12-04-14Dokumen48 halamanPresentation-Case Study of Shanghai Tower 12-04-14saifuddinBelum ada peringkat
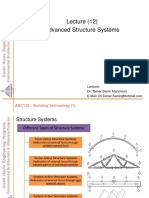
- Lecture 12 - Advanced ST SysDokumen73 halamanLecture 12 - Advanced ST SysAmgad Aly FahmyBelum ada peringkat
- Presentasi Pengantar Arsitektur Zaha HadidDokumen21 halamanPresentasi Pengantar Arsitektur Zaha HadidAbdullah Indra PratamaBelum ada peringkat
- Teori ArsitekturDokumen21 halamanTeori ArsitekturAnnisa Diah AstariniBelum ada peringkat
- Khan ShatyrDokumen15 halamanKhan ShatyrMiftachKarimaHadi100% (1)
- Seismic Design Concepts and Iconic High-Rise BuildingsDokumen2 halamanSeismic Design Concepts and Iconic High-Rise BuildingsRomzi CowemaBelum ada peringkat
- Villa SavoyeDokumen10 halamanVilla SavoyeRifaldiBelum ada peringkat
- Gedung Apartemen Sentraland Semarang 21 LantaiDokumen31 halamanGedung Apartemen Sentraland Semarang 21 LantaiFarid AlqadriBelum ada peringkat
- Al Hamra PDFDokumen58 halamanAl Hamra PDFagus anantaBelum ada peringkat
- CCTV PDFDokumen20 halamanCCTV PDFShaina Marie CabreraBelum ada peringkat
- Reading The Signs On Mosque ArchitectureDokumen13 halamanReading The Signs On Mosque Architecturemiphz100% (1)
- Hong Kong Convention and Exhibition CentreDokumen2 halamanHong Kong Convention and Exhibition CentreJhana SuhphyreBelum ada peringkat
- Willis Tower Case StudyDokumen12 halamanWillis Tower Case StudyFingood HaywardBelum ada peringkat
- Moving Stairs: Understanding Escalators and WalksDokumen21 halamanMoving Stairs: Understanding Escalators and WalksMahaManthraBelum ada peringkat
- The Shard PresentationDokumen15 halamanThe Shard PresentationMonica SaligumbaBelum ada peringkat
- General Health and Safety Information For PillingDokumen8 halamanGeneral Health and Safety Information For PillingiwansalmaBelum ada peringkat
- Pazzi ChapelDokumen12 halamanPazzi ChapelCynthia AnggitaBelum ada peringkat
- Poster For Jin Mao TowerDokumen1 halamanPoster For Jin Mao Towerkiri shimaBelum ada peringkat
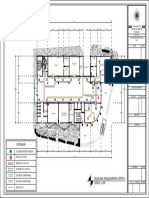
- Keterangan: Ac Ceiling Mounted Cassete Fan Coil Unit (Fcu)Dokumen1 halamanKeterangan: Ac Ceiling Mounted Cassete Fan Coil Unit (Fcu)zani marcelianaBelum ada peringkat
- 05062020FloorRomanCatalogPDF PDFDokumen108 halaman05062020FloorRomanCatalogPDF PDFSepty WaldaniaBelum ada peringkat
- Sustainable Design Strategies for Green Hotel BuildingsDokumen11 halamanSustainable Design Strategies for Green Hotel Buildingsy.adiana andayaniBelum ada peringkat
- PT. PLN Maluku 150kV-70kV GIS Substation Construction DrawingsDokumen5 halamanPT. PLN Maluku 150kV-70kV GIS Substation Construction DrawingsJuragan IwalBelum ada peringkat
- Chapter 15 PDFDokumen12 halamanChapter 15 PDFMohammed Sajid100% (2)
- EscalatorDokumen38 halamanEscalatorDazuky UkyBelum ada peringkat
- Design of Escalators ExplainedDokumen32 halamanDesign of Escalators ExplainedRonalyn CalleleroBelum ada peringkat
- Project Finance Financial Model TemplateDokumen4 halamanProject Finance Financial Model TemplateFaried Putra SandiantoBelum ada peringkat
- Innovation ManagementDokumen308 halamanInnovation ManagementPranay BanerjeeBelum ada peringkat
- Chapter 1Dokumen33 halamanChapter 1projects_masterz100% (1)
- Choprascm5ch12 150901040200 Lva1 App6891 PDFDokumen62 halamanChoprascm5ch12 150901040200 Lva1 App6891 PDFRaihan PervezBelum ada peringkat
- Rethinking Public Transits Role in Our New Normal WhitepaperDokumen4 halamanRethinking Public Transits Role in Our New Normal WhitepaperFaried Putra SandiantoBelum ada peringkat
- Chopra Scm5 Ch13Dokumen58 halamanChopra Scm5 Ch13Faried Putra SandiantoBelum ada peringkat
- Cooper, Lambert Pagh (1997) Supply Chain Management - More Than A New Name For LogisticsDokumen14 halamanCooper, Lambert Pagh (1997) Supply Chain Management - More Than A New Name For LogisticsFaried Putra SandiantoBelum ada peringkat
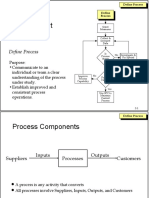
- Basics of Defining ProcessesDokumen18 halamanBasics of Defining ProcessesFaried Putra SandiantoBelum ada peringkat
- Supply Chain Strategies Which One Hits The MarkDokumen11 halamanSupply Chain Strategies Which One Hits The MarkFaried Putra SandiantoBelum ada peringkat
- Defining Supply Chain ManagementDokumen25 halamanDefining Supply Chain ManagementremylemoigneBelum ada peringkat
- Chopra Scm5 Ch11Dokumen90 halamanChopra Scm5 Ch11Faried Putra SandiantoBelum ada peringkat
- Choprascm5ch16 150901040534 Lva1 App6891 PDFDokumen31 halamanChoprascm5ch16 150901040534 Lva1 App6891 PDFMayank PrakashBelum ada peringkat
- Chopra Scm5 Ch18Dokumen16 halamanChopra Scm5 Ch18Faried Putra SandiantoBelum ada peringkat
- Chopra Scm5 Ch15Dokumen51 halamanChopra Scm5 Ch15Faried Putra SandiantoBelum ada peringkat
- 7-Demand Forecasting in SC.Dokumen55 halaman7-Demand Forecasting in SC.ahmedsakr90Belum ada peringkat
- Chopra scm5 ch14Dokumen49 halamanChopra scm5 ch14mnkBelum ada peringkat
- Chopra scm5 ch05Dokumen43 halamanChopra scm5 ch05Syed UmairBelum ada peringkat
- Chopra Scm5 Ch17Dokumen19 halamanChopra Scm5 Ch17Faried Putra SandiantoBelum ada peringkat
- Chopra Scm5 Ch09Dokumen25 halamanChopra Scm5 Ch09Jasmina TachevaBelum ada peringkat
- Choprascm5ch10 150901035835 Lva1 App6891 PDFDokumen28 halamanChoprascm5ch10 150901035835 Lva1 App6891 PDFNafi AhmedBelum ada peringkat
- Chopra scm6 Inppt 02Dokumen38 halamanChopra scm6 Inppt 02ArpitPatelBelum ada peringkat
- Choprascm5ch08 150901035711 Lva1 App6892 PDFDokumen37 halamanChoprascm5ch08 150901035711 Lva1 App6892 PDFMayank PrakashBelum ada peringkat
- Supply Chain Drivers and MetricsDokumen49 halamanSupply Chain Drivers and MetricsstBelum ada peringkat
- Choprascm5ch04 150901035228 Lva1 App6892 PDFDokumen56 halamanChoprascm5ch04 150901035228 Lva1 App6892 PDFMayank PrakashBelum ada peringkat
- Decision TreeDokumen66 halamanDecision TreeAngela HarrisBelum ada peringkat
- Component List TCA785Dokumen1 halamanComponent List TCA785Faried Putra SandiantoBelum ada peringkat
- Chapter 1Dokumen33 halamanChapter 1projects_masterz100% (1)
- Tutorial State Space MatlabDokumen1 halamanTutorial State Space MatlabFaried Putra SandiantoBelum ada peringkat
- Switched Reluctance Motor ControlDokumen62 halamanSwitched Reluctance Motor ControlFaried Putra SandiantoBelum ada peringkat
- Volkswagen Group: Adapting in The Age of AiDokumen10 halamanVolkswagen Group: Adapting in The Age of AiAditi SoniBelum ada peringkat
- ASEAN Two Wheeler MarketDokumen32 halamanASEAN Two Wheeler MarketBharti PuratanBelum ada peringkat
- Business Level StrategyDokumen5 halamanBusiness Level StrategyBhagyashree MohiteBelum ada peringkat
- Bajaj Auto Company NewDokumen94 halamanBajaj Auto Company Newbhas_786Belum ada peringkat
- Henry Ford in The 1920sDokumen5 halamanHenry Ford in The 1920sapi-276243480Belum ada peringkat
- Philips Hr8564 PDFDokumen8 halamanPhilips Hr8564 PDFMarc AlexandruBelum ada peringkat
- Strategy Vs Tactics (OnlyDokumen16 halamanStrategy Vs Tactics (Onlyyashmehta91Belum ada peringkat
- Tti Classifieds 120814Dokumen3 halamanTti Classifieds 120814Digital MediaBelum ada peringkat
- Vdocuments - MX Caterpillar 926e Manuals Volu Caterpillar Wheel Loader Powershift ManualDokumen7 halamanVdocuments - MX Caterpillar 926e Manuals Volu Caterpillar Wheel Loader Powershift ManualAbdelbagi100% (1)
- Sae 17autp06Dokumen45 halamanSae 17autp06FERNANDO JOSE NOVAESBelum ada peringkat
- 2013 01 0151Dokumen6 halaman2013 01 0151xmanian9Belum ada peringkat
- Davison OilDokumen31 halamanDavison OilMichael HengBelum ada peringkat
- Data Book: Automotive TechnicalDokumen1 halamanData Book: Automotive Technicallucian07Belum ada peringkat
- Nicolas-Joseph Cugnot de Rivas EngineDokumen36 halamanNicolas-Joseph Cugnot de Rivas Enginesuhil bBelum ada peringkat
- Pressure Washer Catalog and Price ListDokumen32 halamanPressure Washer Catalog and Price ListFareza MBelum ada peringkat
- Manufacturing ProjectDokumen34 halamanManufacturing ProjectLyonel PearceBelum ada peringkat
- Focuz MotorsDokumen9 halamanFocuz Motorspriyamat18Belum ada peringkat
- BCI Engineering - Global Industrial Manufacturer Specializing in Mining, Materials Handling and Solar EquipmentDokumen31 halamanBCI Engineering - Global Industrial Manufacturer Specializing in Mining, Materials Handling and Solar EquipmentbranthamBelum ada peringkat
- Honda Activa Customer Satisfaction StudyDokumen63 halamanHonda Activa Customer Satisfaction StudySabari GaneshBelum ada peringkat
- Mitsubishi EnginesDokumen4 halamanMitsubishi EnginesIK100% (1)
- A Study On Consumer Buying Behavior Towards Purchase of Used Car'sDokumen85 halamanA Study On Consumer Buying Behavior Towards Purchase of Used Car'sChandan SrivastavaBelum ada peringkat
- Vehicle Alignment Guide: Camber, Caster, Toe, Steering Axis & Turning RadiusDokumen19 halamanVehicle Alignment Guide: Camber, Caster, Toe, Steering Axis & Turning RadiusFajar Setiawan J SBelum ada peringkat
- Bse Copy 31012018Dokumen148 halamanBse Copy 31012018PrashantBelum ada peringkat
- Flight International - August 5 2014 UKDokumen44 halamanFlight International - August 5 2014 UKRohan MahajanBelum ada peringkat
- Global Car Industry: A Brief HistoryDokumen3 halamanGlobal Car Industry: A Brief HistoryLillian KobusingyeBelum ada peringkat
- Raisoni Industrial Hinjewadi Mechanical CopaniesDokumen5 halamanRaisoni Industrial Hinjewadi Mechanical CopaniesGp MishraBelum ada peringkat
- Meera Narula Kalra's Portfolio Snapshot ' 2014Dokumen15 halamanMeera Narula Kalra's Portfolio Snapshot ' 2014MeeraNarulaBelum ada peringkat
- HIA Member ListDokumen5 halamanHIA Member Listbalagangadhar17Belum ada peringkat
- 54 Chassis ElectricalDokumen126 halaman54 Chassis ElectricalCristian CernaBelum ada peringkat
- 26 Mounting Plates For Heavy Duty Fifth Wheel Couplings eDokumen2 halaman26 Mounting Plates For Heavy Duty Fifth Wheel Couplings eAbrar HussainBelum ada peringkat