Anda mungkin juga menyukai
- Android Application Controlled Remote Robot Operation: Under The Guidance ofDokumen36 halamanAndroid Application Controlled Remote Robot Operation: Under The Guidance ofAndrew ValentineBelum ada peringkat
- WarField Land Rover That Alerts On Sensing Panted Land MinesDokumen32 halamanWarField Land Rover That Alerts On Sensing Panted Land MinesPavan KPBelum ada peringkat
- Contactless Liquid Level ControllerDokumen37 halamanContactless Liquid Level Controllerkitty100% (1)
- Line Following RobotDokumen54 halamanLine Following RobotGautam RaaviBelum ada peringkat
- SPEED CHECKER FOR HI-WAsYSDokumen26 halamanSPEED CHECKER FOR HI-WAsYSAbhinav KumaarBelum ada peringkat
- Self Collision DetectorDokumen3 halamanSelf Collision DetectorRavi BhardwajBelum ada peringkat
- War Field Spying Robot With Night Vision Wireless Camera: Submitted byDokumen26 halamanWar Field Spying Robot With Night Vision Wireless Camera: Submitted byankita dhengaleBelum ada peringkat
- Wireless Operated Fire Extinguisher Vehicles With Water Jet SprayDokumen25 halamanWireless Operated Fire Extinguisher Vehicles With Water Jet SprayRaushanVijaySinghBelum ada peringkat
- PIC16F18855 ModDokumen662 halamanPIC16F18855 Modwhynot05Belum ada peringkat
- War Field Spying Robot With Night Vision Wireless Camera by Android ApplicationsDokumen32 halamanWar Field Spying Robot With Night Vision Wireless Camera by Android ApplicationsharshithaBelum ada peringkat
- Vehicle Speed Control System Using RF CommunicationDokumen20 halamanVehicle Speed Control System Using RF CommunicationRaina John100% (2)
- Cellphone Operated Robotic ArmDokumen55 halamanCellphone Operated Robotic ArmVinay ReddyBelum ada peringkat
- IR Radar With Laser Shoot - SYNOPSISDokumen11 halamanIR Radar With Laser Shoot - SYNOPSISashishkvianBelum ada peringkat
- 1st Rev Road RaggingDokumen22 halaman1st Rev Road RaggingElamaruthiBelum ada peringkat
- Gokaraju Rangaraju Institute of Engineering and Technology (Autonomous) Project ReportDokumen28 halamanGokaraju Rangaraju Institute of Engineering and Technology (Autonomous) Project ReportJeevan KumarBelum ada peringkat
- Sumi Proj Copyprojectdoc (Repaired)Dokumen13 halamanSumi Proj Copyprojectdoc (Repaired)lucky jBelum ada peringkat
- ATM Terminal Design Based On Figure Print Recognition DocuDokumen115 halamanATM Terminal Design Based On Figure Print Recognition DocuPraveen NaiduBelum ada peringkat
- Training Report On 8051Dokumen27 halamanTraining Report On 8051Sandeep SainiBelum ada peringkat
- Institute of Engineering and Technology, Alwar, Rajasthan: Wireless Keypad Controlled RobotDokumen44 halamanInstitute of Engineering and Technology, Alwar, Rajasthan: Wireless Keypad Controlled RobotTwinkle SinghBelum ada peringkat
- Speed Checker To Detect Rash Driving oDokumen22 halamanSpeed Checker To Detect Rash Driving oSrikaraniBelum ada peringkat
- PC Based Robot Controlling Using Wireless Communication With ASK ModulationDokumen74 halamanPC Based Robot Controlling Using Wireless Communication With ASK ModulationSyam Kumar SBelum ada peringkat
- Seminar Report On Missile Detection SystemDokumen26 halamanSeminar Report On Missile Detection SystemSaurabh SinghBelum ada peringkat
- Railway Accident Monitoring System: A Project Report ONDokumen13 halamanRailway Accident Monitoring System: A Project Report ONPrateek SrivastavBelum ada peringkat
- Project Name: Project Guide and Other InformationDokumen24 halamanProject Name: Project Guide and Other InformationABHISHEK PATANKARBelum ada peringkat
- Software For Visually ImpairedDokumen19 halamanSoftware For Visually ImpairedRutwik DoleBelum ada peringkat
- Application Note ATtiny32Dokumen13 halamanApplication Note ATtiny32Neeraj MauryaBelum ada peringkat
- File 1406270302Dokumen25 halamanFile 1406270302rupeshBelum ada peringkat
- Remote Speed Control by Thyristor Trigger Angle Change With Display of Delayed Firing AngleDokumen18 halamanRemote Speed Control by Thyristor Trigger Angle Change With Display of Delayed Firing Anglemahasweta banerjeeBelum ada peringkat
- Industrial Conveyors Belt Counting Object SystemDokumen15 halamanIndustrial Conveyors Belt Counting Object SystemRavi Joshi100% (1)
- Automatic Railway Gate Control SystemDokumen10 halamanAutomatic Railway Gate Control SystemKailash Kandpal100% (1)
- Features of The LPC214X FamilyDokumen13 halamanFeatures of The LPC214X FamilyramyaBelum ada peringkat
- EI150 Remote Stepper Motor Control Based On Embedded SystemDokumen35 halamanEI150 Remote Stepper Motor Control Based On Embedded SystemAvetri VigneshwaranBelum ada peringkat
- Submitted To: Submitted By:: (Department of Electronics and Instrumentation Engg.)Dokumen19 halamanSubmitted To: Submitted By:: (Department of Electronics and Instrumentation Engg.)nikboy88Belum ada peringkat
- OBD (PWM) To RS232 Interpreter ELM320: Description FeaturesDokumen16 halamanOBD (PWM) To RS232 Interpreter ELM320: Description FeaturesIvan Francisco LorenzattiBelum ada peringkat
- Spying Robot For Army PurposeDokumen31 halamanSpying Robot For Army Purposeankit25393Belum ada peringkat
- Integration of Electronic Speed Governor With RFID Technology For Speed LimitingDokumen86 halamanIntegration of Electronic Speed Governor With RFID Technology For Speed LimitingNithinReddy100% (1)
- Thanks: With More Than 1000 Students/ Professors, Subject Experts and Editors Contributing To It Every DayDokumen46 halamanThanks: With More Than 1000 Students/ Professors, Subject Experts and Editors Contributing To It Every DayGaurav Sharma0% (1)
- 25.ACCESSIBLE DISPLAY DESIGN TO CONTROL HOME AREA NETWORKSDocumentDokumen84 halaman25.ACCESSIBLE DISPLAY DESIGN TO CONTROL HOME AREA NETWORKSDocumentdileeppatraBelum ada peringkat
- Automatic Irrigation SystemDokumen21 halamanAutomatic Irrigation SystemAnish SharmaBelum ada peringkat
- Acharya Institute of Technology Broadband Over Power Line: Title of The ProjectDokumen24 halamanAcharya Institute of Technology Broadband Over Power Line: Title of The ProjectroysandyBelum ada peringkat
- Advanced Communication Design For Mobile Disabling at Restricted Areas Microcontroller:-FeaturesDokumen8 halamanAdvanced Communication Design For Mobile Disabling at Restricted Areas Microcontroller:-FeaturesIndhumathi MohanBelum ada peringkat
- Metro TrainDokumen24 halamanMetro Trainguddu9Belum ada peringkat
- c2 and c3 ReportDokumen40 halamanc2 and c3 ReportDinesh NBelum ada peringkat
- Hand Gesture Control Robot PDFDokumen3 halamanHand Gesture Control Robot PDFMd IrfanBelum ada peringkat
- Project Report (Sample)Dokumen80 halamanProject Report (Sample)Swapnith VarmaBelum ada peringkat
- Railway Track Security SystmDokumen28 halamanRailway Track Security SystmNikhil Hosur0% (1)
- Embedded Based Anti-Collision System in Trains and Controlling of Unmanned Rail GatesDokumen22 halamanEmbedded Based Anti-Collision System in Trains and Controlling of Unmanned Rail GatesAdeline WinsterBelum ada peringkat
- Presentation On Gesture Controlled Robotic ArmDokumen30 halamanPresentation On Gesture Controlled Robotic ArmsuyashBelum ada peringkat
- Embedded LaboratoryDokumen95 halamanEmbedded LaboratoryRajkumar kkBelum ada peringkat
- Prepaid Energy Meter Under The Guidance Of: Project TitleDokumen24 halamanPrepaid Energy Meter Under The Guidance Of: Project Titlesangeetha sangeethaBelum ada peringkat
- Automatic Railway Gate Control SystemDokumen14 halamanAutomatic Railway Gate Control SystemMukesh ChauhanBelum ada peringkat
- File 1389423203Dokumen21 halamanFile 1389423203Preeti SinghBelum ada peringkat
- Supraja DocumentDokumen73 halamanSupraja DocumentAnonymous gWVMMa588pBelum ada peringkat
- Developing Islanding Arrangement Automatically For Grid On Sensing Bad Voltage or FrequencyDokumen29 halamanDeveloping Islanding Arrangement Automatically For Grid On Sensing Bad Voltage or FrequencyNitin AdamBelum ada peringkat
- Speed Control System With Rfid Equipped VehicleDokumen27 halamanSpeed Control System With Rfid Equipped VehicleAnonymous L9fB0XUBelum ada peringkat
- CapstoneDokumen16 halamanCapstoneHarsh ShahBelum ada peringkat
- TachometerDokumen51 halamanTachometerKiran SugandhiBelum ada peringkat
- Ch08 3d Technology (Not Much Use)Dokumen35 halamanCh08 3d Technology (Not Much Use)Naveen BabuBelum ada peringkat
- Cordex HP 1.2kW: 1RU Integrated Shelf System With GMT DistributionDokumen2 halamanCordex HP 1.2kW: 1RU Integrated Shelf System With GMT DistributionJohn WikieBelum ada peringkat
- Design and Fabrication of Mini Surveillance Drone PresentationDokumen9 halamanDesign and Fabrication of Mini Surveillance Drone PresentationSaijay ShirodkarBelum ada peringkat
- Micom P44X: Numerical Distance Protection RelayDokumen152 halamanMicom P44X: Numerical Distance Protection RelayKuenley TiNy OndeBelum ada peringkat
- Manual de Partes JCB JS200L PDFDokumen99 halamanManual de Partes JCB JS200L PDFAdolfo Martinez89% (18)
- What Are The Best Telemarketing Scripts?: 4 AnswersDokumen4 halamanWhat Are The Best Telemarketing Scripts?: 4 AnswersDaniela SoaresBelum ada peringkat
- Khairah@Asma'a, Saedah, Muhammad Faizal - 2017 - Penerimaan M-Pembelajaran Dalam Kalangan Pensyarah Institut Pendidikan Guru Malaysia MeDokumen18 halamanKhairah@Asma'a, Saedah, Muhammad Faizal - 2017 - Penerimaan M-Pembelajaran Dalam Kalangan Pensyarah Institut Pendidikan Guru Malaysia MeMstr SevenBelum ada peringkat
- T2265 PDFDokumen0 halamanT2265 PDFMerlin PokamBelum ada peringkat
- Introduction To Vault CoreDokumen25 halamanIntroduction To Vault CoreUni QloBelum ada peringkat
- Gs01c21b03-00e (23) Eja120aDokumen10 halamanGs01c21b03-00e (23) Eja120aNguyen ThuongBelum ada peringkat
- Remake The Mosquito KillerDokumen18 halamanRemake The Mosquito KillerLuelsonCordovaDeclaradorBelum ada peringkat
- Ethics in Software Engineering PDFDokumen2 halamanEthics in Software Engineering PDFJessicaBelum ada peringkat
- City PlanningDokumen2 halamanCity PlanningNidhi KalraBelum ada peringkat
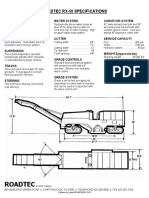
- RX 50 SpecDokumen1 halamanRX 50 SpecFelipe HernándezBelum ada peringkat
- The - hitmans.bodyguard.2017.HDRip - xvid.AC3 EVODokumen1 halamanThe - hitmans.bodyguard.2017.HDRip - xvid.AC3 EVORAMAKRISHNAN RBelum ada peringkat
- ConfiguracionDokumen32 halamanConfiguracionangelmauriciormzBelum ada peringkat
- DLM382 DLM432: en SV No Fi LV LT Et RuDokumen80 halamanDLM382 DLM432: en SV No Fi LV LT Et RuAivaras SaniukasBelum ada peringkat
- Advanced Lidar Data Processing With LastoolsDokumen6 halamanAdvanced Lidar Data Processing With Lastoolsaa_purwantaraBelum ada peringkat
- Fisa Tehnica Camera Supraveghere Exterior Dahua Starlight HAC-HFW1230T-A-0360BDokumen3 halamanFisa Tehnica Camera Supraveghere Exterior Dahua Starlight HAC-HFW1230T-A-0360BDanielTeglasBelum ada peringkat
- Product and Service Design - Questions and AnswersDokumen4 halamanProduct and Service Design - Questions and Answershakim_9569Belum ada peringkat
- ReliefVent FinalDokumen16 halamanReliefVent FinalHAZEL JEAN BIGCASBelum ada peringkat
- Excel VBA Dictionary - A Complete Guide - Excel Macro MasteryDokumen56 halamanExcel VBA Dictionary - A Complete Guide - Excel Macro MasteryWong Yew LeongBelum ada peringkat
- Sense Furnishings Beyond Touch - HDPO - 23-24 - 54Dokumen2 halamanSense Furnishings Beyond Touch - HDPO - 23-24 - 54Shivam DadhichBelum ada peringkat
- B10 Ignition System: To IndexDokumen7 halamanB10 Ignition System: To Indexwei fooBelum ada peringkat
- IMP Q For End Sem ExaminationDokumen2 halamanIMP Q For End Sem Examinationzk8745817Belum ada peringkat
- Script Rotation V 1.8.1BETADokumen122 halamanScript Rotation V 1.8.1BETADuni AhmadBelum ada peringkat
- NFE10 Master Guide en v13Dokumen26 halamanNFE10 Master Guide en v13dri0510Belum ada peringkat
- Security MindsetDokumen3 halamanSecurity MindsetcykablyatBelum ada peringkat
- FR-E700 Product Details - Mitsubishi Electric InversorDokumen8 halamanFR-E700 Product Details - Mitsubishi Electric InversorGeoplaceBelum ada peringkat
- Eurocell Panel Vertical Polarization Half-Power Beam WidthDokumen1 halamanEurocell Panel Vertical Polarization Half-Power Beam WidthGEORGEBelum ada peringkat