Anda mungkin juga menyukai
- Technical Feedback EhtcDokumen9 halamanTechnical Feedback EhtcPrashant Kumar ChoudharyBelum ada peringkat
- Governing SystemDokumen30 halamanGoverning Systempcsh24267% (3)
- SETUP INVERTER FROM SCRATCHDokumen4 halamanSETUP INVERTER FROM SCRATCHozgurxcBelum ada peringkat
- Generator Excitation SystemDokumen16 halamanGenerator Excitation SystemRuban Kumar100% (1)
- Modelling and Load Frequency Control L12Dokumen27 halamanModelling and Load Frequency Control L12Rajat RaiBelum ada peringkat
- Generator Protection Unit#3 KMPCLDokumen15 halamanGenerator Protection Unit#3 KMPCLAmaresh NayakBelum ada peringkat
- Bla Power Pvt. LTD: Woodward 505 Governor Valve / Actuator Calibration &testDokumen23 halamanBla Power Pvt. LTD: Woodward 505 Governor Valve / Actuator Calibration &testWilliam Will Controle WoodwardBelum ada peringkat
- Generator Controls Voltage StabilityDokumen13 halamanGenerator Controls Voltage StabilityhhipowerBelum ada peringkat
- M Excitation SystemDokumen34 halamanM Excitation Systemjp mishraBelum ada peringkat
- GENERATOR Cooling System Technical DetailsDokumen54 halamanGENERATOR Cooling System Technical DetailsParvin KumarBelum ada peringkat
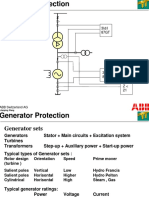
- Generator ProtectionDokumen24 halamanGenerator ProtectionSantoshkumar Gupta100% (1)
- Turbine Governing SystemDokumen77 halamanTurbine Governing SystemGrishma WarkeBelum ada peringkat
- Meiden 4-Pole Synchronous GeneratorsDokumen7 halamanMeiden 4-Pole Synchronous Generatorsrodruren01Belum ada peringkat
- Tsi FinalDokumen41 halamanTsi FinalAnand KumarBelum ada peringkat
- Black Start of SR 2014Dokumen211 halamanBlack Start of SR 2014Mahesh SankarankuttyBelum ada peringkat
- 11 Thyripol Main Project FileDokumen11 halaman11 Thyripol Main Project FileKirankumar Reddy100% (1)
- Load SheddingDokumen32 halamanLoad SheddingRoger Kyaw Swar Phone MaungBelum ada peringkat
- Governor TutorialDokumen13 halamanGovernor TutorialWalid Fattah100% (1)
- CRH Drain Pot LevelDokumen30 halamanCRH Drain Pot LevelBibhash SinghBelum ada peringkat
- Dcs SystemDokumen7 halamanDcs SystemJeya Kannan100% (1)
- Ads A TG Integral Block Speed B 100 S B 3000 2900 - X T MIN MAX I SDokumen5 halamanAds A TG Integral Block Speed B 100 S B 3000 2900 - X T MIN MAX I SRamakrishnan NatarajanBelum ada peringkat
- 261Dokumen11 halaman261nitinseebBelum ada peringkat
- 01 MGC3000speed Governor User Manual PDFDokumen180 halaman01 MGC3000speed Governor User Manual PDFChee NguyenBelum ada peringkat
- KSS On Generator Cooling SystemDokumen38 halamanKSS On Generator Cooling SystemSakthi MuruganBelum ada peringkat
- 12MW Logic Writeup 62OP42338 - U1 - 625040022RDokumen13 halaman12MW Logic Writeup 62OP42338 - U1 - 625040022RPrima WesiBelum ada peringkat
- Valvulas FC WoodwortDokumen2 halamanValvulas FC WoodwortMigue MedZa100% (1)
- Heffron-Phillips - Effect of A Modern Amplidyne Voltage RegulatorDokumen6 halamanHeffron-Phillips - Effect of A Modern Amplidyne Voltage RegulatorManfred BedriñanaBelum ada peringkat
- 3882 1 RG3CatalogueDokumen12 halaman3882 1 RG3CatalogueJose Domingo Castro100% (1)
- AI MI Catalogue - A4 PDFDokumen26 halamanAI MI Catalogue - A4 PDFAbhishek SinhaBelum ada peringkat
- MANAGEMENT OF 24V DC SUPPLY FAILURE FOR SG/TG SYSTEMDokumen23 halamanMANAGEMENT OF 24V DC SUPPLY FAILURE FOR SG/TG SYSTEMShiftinchargeengineer dadri coalBelum ada peringkat
- A New Method For Online Thyristor Conduction Monitoring Based On Thyristor Current Waveform Recording in Static Excitation SystemDokumen6 halamanA New Method For Online Thyristor Conduction Monitoring Based On Thyristor Current Waveform Recording in Static Excitation SystemR0B0T2013Belum ada peringkat
- Synchronous Motor Drives: Open Loop V/F Control of Synchronous MotorDokumen11 halamanSynchronous Motor Drives: Open Loop V/F Control of Synchronous MotorSaish Dalvi100% (1)
- Frequency Control and AGC Final 2012-PresentationDokumen24 halamanFrequency Control and AGC Final 2012-PresentationSamirBelum ada peringkat
- Automatic Generation ControlDokumen19 halamanAutomatic Generation ControlAjay Talajiya100% (1)
- Proportionality of hydraulic control systemsDokumen7 halamanProportionality of hydraulic control systemsradharaman_znaBelum ada peringkat
- Frequent Tripping of VFD On BUSHOG - JUN10 PDFDokumen2 halamanFrequent Tripping of VFD On BUSHOG - JUN10 PDFsanjeevchhabraBelum ada peringkat
- Model:KM2800: Rating RangeDokumen4 halamanModel:KM2800: Rating RangeT.S. Anklesaria100% (1)
- Modification in 500MW CBD Line For Proper Boiler Water SamplingDokumen54 halamanModification in 500MW CBD Line For Proper Boiler Water SamplingJackSparrow86Belum ada peringkat
- RGMO SynopsisDokumen2 halamanRGMO Synopsismahima sharmaBelum ada peringkat
- Positive, Zero, Negative Sequence of AlternatorDokumen3 halamanPositive, Zero, Negative Sequence of AlternatorJeya KannanBelum ada peringkat
- Management of DC Supply Failure.05.07.2020Dokumen66 halamanManagement of DC Supply Failure.05.07.2020ntpc bgtppBelum ada peringkat
- CMCDokumen32 halamanCMCAnubhav Amu PanditBelum ada peringkat
- 600MW Turbo Generator Technical Data and Maintenance ProceduresDokumen5 halaman600MW Turbo Generator Technical Data and Maintenance ProceduresjaaduscribdBelum ada peringkat
- Vol1 12Dokumen41 halamanVol1 12keerthi dayarathnaBelum ada peringkat
- RGMO Frequency Influence SchemeDokumen1 halamanRGMO Frequency Influence SchemeJitendra SharmaBelum ada peringkat
- Automation Solution Guide: From The Needs, Choose An Architecture, Then A Technology To Lead To A ProductDokumen20 halamanAutomation Solution Guide: From The Needs, Choose An Architecture, Then A Technology To Lead To A ProductdenisonocBelum ada peringkat
- Power PlantDokumen28 halamanPower PlantSanjay SharmaBelum ada peringkat
- On Job Training at Tanjung Bin Power Plant Erick ImmanuelDokumen40 halamanOn Job Training at Tanjung Bin Power Plant Erick ImmanuelFabi FahrizalBelum ada peringkat
- High Axial Shift in Turbine, 210 MW Unit, 02-03 PDFDokumen1 halamanHigh Axial Shift in Turbine, 210 MW Unit, 02-03 PDFsanjeevchhabraBelum ada peringkat
- Mini Hydal Power PlantDokumen18 halamanMini Hydal Power PlantNoufalBelum ada peringkat
- 9000 U Single - Dual Output - 1Dokumen2 halaman9000 U Single - Dual Output - 1Tamal DuttaBelum ada peringkat
- Generator Protection Guide for Faults and Abnormal ConditionsDokumen86 halamanGenerator Protection Guide for Faults and Abnormal ConditionsAbhishek RajputBelum ada peringkat
- Ester-Filled Distribution Transformers Draft Standard PublishedDokumen37 halamanEster-Filled Distribution Transformers Draft Standard PublishedJeya KannanBelum ada peringkat
- Ehtc JharliDokumen38 halamanEhtc JharliRakesh Bagri100% (2)
- KWU Electro Hydraulic Governing Final1Dokumen41 halamanKWU Electro Hydraulic Governing Final1Sam80% (5)
- Metoda Pengujian GeneratorDokumen52 halamanMetoda Pengujian Generatorsarwant_wantBelum ada peringkat
- Inverter Varispeed F7A (KAE-S616-55F)Dokumen98 halamanInverter Varispeed F7A (KAE-S616-55F)Miguel LinaresBelum ada peringkat
- KWU Electro Hydraulic Governing Final1Dokumen41 halamanKWU Electro Hydraulic Governing Final1Rahul Dev Goswami100% (2)
- Cost-Effective Digital Turbine Controller TC100Dokumen4 halamanCost-Effective Digital Turbine Controller TC100cbmanausBelum ada peringkat
- EHC NewDokumen46 halamanEHC NewSam100% (6)
- Diesel Engine Condition MonitoringDokumen160 halamanDiesel Engine Condition Monitoringlahiru1983Belum ada peringkat
- Diesel Engine Condition MonitoringDokumen160 halamanDiesel Engine Condition Monitoringlahiru1983Belum ada peringkat
- Piston SeizuresDokumen7 halamanPiston SeizuresMoaed KanbarBelum ada peringkat
- Introduction To Bomb Calorimetry PDFDokumen12 halamanIntroduction To Bomb Calorimetry PDFAnbu AyyappanBelum ada peringkat
- Diesel Engine Condition MonitoringDokumen301 halamanDiesel Engine Condition Monitoringlahiru1983Belum ada peringkat
- Condition Monitoring of Diesel EnginesDokumen14 halamanCondition Monitoring of Diesel Engineslahiru1983Belum ada peringkat
- Piston SeizuresDokumen7 halamanPiston SeizuresMoaed KanbarBelum ada peringkat
- MPC Oil Varnish Potential Testing ASTM D-7843 - White - Paper - Sep - 2016 PDFDokumen5 halamanMPC Oil Varnish Potential Testing ASTM D-7843 - White - Paper - Sep - 2016 PDFMauro MLRBelum ada peringkat
- Icap 4200 Icp OesDokumen4 halamanIcap 4200 Icp Oeslahiru1983Belum ada peringkat
- Lube Tech025 Oil CleanlinessDokumen4 halamanLube Tech025 Oil Cleanlinesslahiru1983Belum ada peringkat
- ASTM TablesDokumen185 halamanASTM Tableslahiru198367% (3)
- Basic Mechanical Speed GovernorsDokumen28 halamanBasic Mechanical Speed Governorslahiru1983Belum ada peringkat
- Element Analysis in Lubricating OilsDokumen12 halamanElement Analysis in Lubricating Oilslahiru1983Belum ada peringkat
- Lower and Higher Heating Values of Gas Liquid and Solid FuelsDokumen1 halamanLower and Higher Heating Values of Gas Liquid and Solid FuelsNikunj PipariyaBelum ada peringkat
- Engineering GeologyDokumen11 halamanEngineering Geologylahiru1983Belum ada peringkat
- Introduction To Bomb Calorimetry PDFDokumen12 halamanIntroduction To Bomb Calorimetry PDFAnbu AyyappanBelum ada peringkat
- Advantages of Pneumatic Control Systems: MAN B&W DieselDokumen10 halamanAdvantages of Pneumatic Control Systems: MAN B&W Diesellahiru1983Belum ada peringkat
- White Paper - Oil Analysis OverviewDokumen6 halamanWhite Paper - Oil Analysis Overviewlahiru1983Belum ada peringkat
- ASME PTC 17-1991-Reciprocating IC Engines HighlightedDokumen40 halamanASME PTC 17-1991-Reciprocating IC Engines Highlightedlahiru1983100% (1)
- Lower and Higher Heating Values of Gas Liquid and Solid FuelsDokumen1 halamanLower and Higher Heating Values of Gas Liquid and Solid FuelsNikunj PipariyaBelum ada peringkat
- D240 Calorific Value PDFDokumen9 halamanD240 Calorific Value PDFlahiru1983Belum ada peringkat
- Introduction To Bomb Calorimetry PDFDokumen12 halamanIntroduction To Bomb Calorimetry PDFlahiru1983Belum ada peringkat
- Feasibility StudiesDokumen21 halamanFeasibility Studieslahiru1983Belum ada peringkat
- ASTM D 1298 - GustinaDokumen6 halamanASTM D 1298 - GustinaВесна РадинBelum ada peringkat
- UT Technotes 2011.enDokumen11 halamanUT Technotes 2011.enAlexandru StefanBelum ada peringkat
- Aliapur Net Calorific Value PDFDokumen6 halamanAliapur Net Calorific Value PDFlahiru1983Belum ada peringkat
- In Situ Francis Turbine Blade RepairDokumen44 halamanIn Situ Francis Turbine Blade Repairlahiru1983Belum ada peringkat
- Steam Turbine TheoryDokumen16 halamanSteam Turbine Theoryvik03223Belum ada peringkat
- Steam Turbine TheoryDokumen16 halamanSteam Turbine Theoryvik03223Belum ada peringkat
- ScorpioDokumen1 halamanScorpioCharsea ReighBelum ada peringkat
- Dialogue CollectionDokumen121 halamanDialogue CollectionYo Yo Moyal Raj69% (13)
- Challenges of Quality Worklife and Job Satisfaction for Food Delivery EmployeesDokumen15 halamanChallenges of Quality Worklife and Job Satisfaction for Food Delivery EmployeesStephani shethaBelum ada peringkat
- Roy FloydDokumen2 halamanRoy FloydDaniela Florina LucaBelum ada peringkat
- TPADokumen9 halamanTPAAli ShahBelum ada peringkat
- Sa Tally Education BrochureDokumen6 halamanSa Tally Education BrochurePoojaMittalBelum ada peringkat
- Dilkeswar PDFDokumen21 halamanDilkeswar PDFDilkeshwar PandeyBelum ada peringkat
- Advertising and Promotion An Integrated Marketing Communications Perspective 11Th Edition Belch Solutions Manual Full Chapter PDFDokumen36 halamanAdvertising and Promotion An Integrated Marketing Communications Perspective 11Th Edition Belch Solutions Manual Full Chapter PDFjames.graven613100% (13)
- Do Not Go GentleDokumen5 halamanDo Not Go Gentlealmeidaai820% (1)
- Woodward FieserDokumen7 halamanWoodward FieserUtkarsh GomberBelum ada peringkat
- Graduation SpeechesDokumen9 halamanGraduation SpeechesSeun IsraelBelum ada peringkat
- Study Plan Psychology II PDFDokumen6 halamanStudy Plan Psychology II PDFirfanBelum ada peringkat
- NafsDokumen3 halamanNafsMabub_sddqBelum ada peringkat
- OAU004301 UMG8900 Data Configuration and Routine Maintenance R003 ISSUE2!0!20050622Dokumen56 halamanOAU004301 UMG8900 Data Configuration and Routine Maintenance R003 ISSUE2!0!20050622firas1976Belum ada peringkat
- Futura.: Design by Zoey RugelDokumen2 halamanFutura.: Design by Zoey RugelZoey RugelBelum ada peringkat
- Sea Creatures List, Prices, Shadow Sizes, and Times ACNH - Animal Crossing New Horizons (Switch) Game8Dokumen1 halamanSea Creatures List, Prices, Shadow Sizes, and Times ACNH - Animal Crossing New Horizons (Switch) Game8botonlouietBelum ada peringkat
- TASSEOGRAPHY - Your Future in A Coffee CupDokumen5 halamanTASSEOGRAPHY - Your Future in A Coffee Cupcharles walkerBelum ada peringkat
- Experiment No. 16 - Preparation & Standardization of Oxalic Acid DataDokumen2 halamanExperiment No. 16 - Preparation & Standardization of Oxalic Acid Datapharmaebooks100% (2)
- Quarter 3 - Module 8: The Power (Positivity, Optimism and Resiliency) To CopeDokumen3 halamanQuarter 3 - Module 8: The Power (Positivity, Optimism and Resiliency) To Copejonalyn felipe100% (1)
- John 1.1 (106 Traduções) PDFDokumen112 halamanJohn 1.1 (106 Traduções) PDFTayna Vilela100% (1)
- Understanding Culture, Society and PoliticsDokumen71 halamanUnderstanding Culture, Society and PoliticsAl Cheeno AnonuevoBelum ada peringkat
- Business Statistics: Methods For Describing Sets of DataDokumen103 halamanBusiness Statistics: Methods For Describing Sets of DataDrake AdamBelum ada peringkat
- Sharpe RatioDokumen7 halamanSharpe RatioSindhuja PalanichamyBelum ada peringkat
- Aquinas' EthicsDokumen33 halamanAquinas' EthicsRBCD INDUSTRIAL SUPPLY100% (1)
- Crisostomo Et Al. v. Atty. Nazareno, A.C. No. 6677, June 10, 2014Dokumen6 halamanCrisostomo Et Al. v. Atty. Nazareno, A.C. No. 6677, June 10, 2014Pamela TambaloBelum ada peringkat
- HTTPDokumen40 halamanHTTPDherick RaleighBelum ada peringkat
- Pat Garrett and Billy The Kid by Rudy WurlitzerDokumen115 halamanPat Garrett and Billy The Kid by Rudy WurlitzerA. TmoqBelum ada peringkat
- Anaphylactic ShockDokumen19 halamanAnaphylactic ShockrutiranBelum ada peringkat
- Junkspace: Hilary PowellDokumen5 halamanJunkspace: Hilary PowellPilar PinchartBelum ada peringkat