Anda mungkin juga menyukai
- Differential Transformation Method for Mechanical Engineering ProblemsDari EverandDifferential Transformation Method for Mechanical Engineering ProblemsBelum ada peringkat
- Extra Exercise Pneumatics Sequence CircuitDokumen1 halamanExtra Exercise Pneumatics Sequence CircuitJ.m.MoraBelum ada peringkat
- ECE485/585: Programmable Logic Controllers Exam #1 (Sample Style Questions) Instructor: Dr. D. J. JacksonDokumen4 halamanECE485/585: Programmable Logic Controllers Exam #1 (Sample Style Questions) Instructor: Dr. D. J. Jacksonnida haqBelum ada peringkat
- Nichols ChartDokumen9 halamanNichols ChartJin Sung AhnBelum ada peringkat
- Proteus VSMDokumen2 halamanProteus VSMbouje72Belum ada peringkat
- Design and Simulation of Control System For Bearingless Synchronous Reluctance Motor PDFDokumen5 halamanDesign and Simulation of Control System For Bearingless Synchronous Reluctance Motor PDFKrishnam NaiduBelum ada peringkat
- 1 Flexible Link ProjectDokumen15 halaman1 Flexible Link Projectprasaad08Belum ada peringkat
- Mechatronics Systems PDFDokumen23 halamanMechatronics Systems PDFRamanathan DuraiBelum ada peringkat
- Linkages: 2.1. FOUR - Bar LinkageDokumen29 halamanLinkages: 2.1. FOUR - Bar LinkageaddisudagneBelum ada peringkat
- Design & Fabrication of Soft Robotic Gripper For Handling Fragile ObjectsDokumen42 halamanDesign & Fabrication of Soft Robotic Gripper For Handling Fragile Objectssaisrini98Belum ada peringkat
- ME8512 - TE - AU Practical Students Individual QuestionDokumen4 halamanME8512 - TE - AU Practical Students Individual Questionsikkandar faizBelum ada peringkat
- Assignment 2Dokumen5 halamanAssignment 2aiao90Belum ada peringkat
- Lab Manual 1-8Dokumen31 halamanLab Manual 1-8Vengat Raman Manohar100% (1)
- Beam Analysis Using Singularity FunctionDokumen16 halamanBeam Analysis Using Singularity FunctionSire MkubwaBelum ada peringkat
- How Does Microprocessor Differentiate Between Data and InstructionDokumen60 halamanHow Does Microprocessor Differentiate Between Data and InstructionUbaid Saudagar100% (1)
- 8051 Pin DiagramDokumen20 halaman8051 Pin DiagramVineet Kumar PandeyBelum ada peringkat
- Report ASIC Design FlowDokumen2 halamanReport ASIC Design FlowNimmalapudi SureshBelum ada peringkat
- Evaluation of The Transient Response of A DC MotorDokumen6 halamanEvaluation of The Transient Response of A DC MotorNesuh MalangBelum ada peringkat
- Inverse Kinematics PUMA 762 SimulatorDokumen1 halamanInverse Kinematics PUMA 762 SimulatorMuhammad ZulfiqarBelum ada peringkat
- Chapter 3Dokumen58 halamanChapter 3ketemaBelum ada peringkat
- D 01Dokumen209 halamanD 01Raj Boda0% (1)
- Force Analysis of Machinery: 9.1. Inertia Force and Inertia TorqueDokumen16 halamanForce Analysis of Machinery: 9.1. Inertia Force and Inertia TorqueaddisudagneBelum ada peringkat
- Force and Torque MeasurementsDokumen30 halamanForce and Torque MeasurementsArunabha Datta100% (3)
- Labs-Engineering Drawing Lab 2Dokumen7 halamanLabs-Engineering Drawing Lab 2rkadiraj7011Belum ada peringkat
- Simulation - Thermal AssignmentDokumen2 halamanSimulation - Thermal Assignmentsumardiono10Belum ada peringkat
- Column and Knee Type MillingDokumen17 halamanColumn and Knee Type Millingsatishbandla1991100% (2)
- Introduction To Robotics by Niku: Click Here To DownloadDokumen3 halamanIntroduction To Robotics by Niku: Click Here To DownloadJAdekingBelum ada peringkat
- Speed Torque Characteristics of 3 Phase Induction MotorDokumen4 halamanSpeed Torque Characteristics of 3 Phase Induction MotorAdi AdnanBelum ada peringkat
- Acceleration Analysis of LinkagesDokumen13 halamanAcceleration Analysis of LinkagesaddisudagneBelum ada peringkat
- Chapter 4 - Dynamic AnalysisDokumen16 halamanChapter 4 - Dynamic AnalysisDimple Sharma100% (1)
- Ics 2.force and Torque Measurement NotesDokumen12 halamanIcs 2.force and Torque Measurement NotesAbigith BabyBelum ada peringkat
- Introduction of Electric Power Transmission and DistributionDokumen12 halamanIntroduction of Electric Power Transmission and Distributionnageen100% (1)
- High School Science - Dimensional AnalysisDokumen9 halamanHigh School Science - Dimensional AnalysisPort of Long BeachBelum ada peringkat
- Common Base Transistor Characteristics PDFDokumen2 halamanCommon Base Transistor Characteristics PDFTravis50% (2)
- Basic Electrical Engineering Lecture Part 1pdfDokumen44 halamanBasic Electrical Engineering Lecture Part 1pdfCedric ZamoraBelum ada peringkat
- Magenetic Chip Collector New 2Dokumen27 halamanMagenetic Chip Collector New 2Hemasundar Reddy JolluBelum ada peringkat
- ME 31 Kinematics Sample Problems Velocity Analysis PDFDokumen60 halamanME 31 Kinematics Sample Problems Velocity Analysis PDFAmadeo ErebaraBelum ada peringkat
- Lesson 13 Induction Motor Model Example: ET 332b Ac Motors, Generators and Power SystemsDokumen8 halamanLesson 13 Induction Motor Model Example: ET 332b Ac Motors, Generators and Power SystemsJocel GuzmanBelum ada peringkat
- Unit 2 PDFDokumen170 halamanUnit 2 PDFSaurabh RajBelum ada peringkat
- Electrical Analogy of Physical SystemDokumen7 halamanElectrical Analogy of Physical SystemAmitava BiswasBelum ada peringkat
- Inverse Kinematics For Robot Arm PDFDokumen6 halamanInverse Kinematics For Robot Arm PDFelvagojpBelum ada peringkat
- Robotics: Dynamic Model of ManipulatorsDokumen20 halamanRobotics: Dynamic Model of ManipulatorsbalkyderBelum ada peringkat
- J OperatorDokumen6 halamanJ OperatorManikandan SundararajBelum ada peringkat
- Lab 5Dokumen11 halamanLab 5Waleed Bashir KotlaBelum ada peringkat
- 19EE5803 UNIT-4 Path Planning: Prepared by S.ChithraDokumen49 halaman19EE5803 UNIT-4 Path Planning: Prepared by S.ChithraTizon Star100% (1)
- 360 Topic 6 DC MachineDokumen33 halaman360 Topic 6 DC MachineAchsan ArfandiBelum ada peringkat
- FCS Lab2Dokumen36 halamanFCS Lab2muhammadBelum ada peringkat
- Chapter 9 SensorsDokumen48 halamanChapter 9 Sensorsامجد الغالبيBelum ada peringkat
- Sat Comm Sys EngineeringDokumen34 halamanSat Comm Sys EngineeringHamis RamadhaniBelum ada peringkat
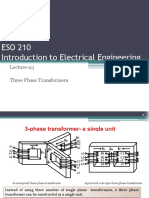
- Transformers - Three Phase TransformersDokumen25 halamanTransformers - Three Phase TransformersDeepakDeep100% (1)
- Chapter 2 TransformersDokumen3 halamanChapter 2 TransformersSuktara-Drubatara TaritBelum ada peringkat
- Handout2 Kinematics 1Dokumen11 halamanHandout2 Kinematics 1Gipsa JosephBelum ada peringkat
- Principles of Electrical Engineering Question BankDokumen8 halamanPrinciples of Electrical Engineering Question BankUpender Rao SunkishalaBelum ada peringkat
- Question Bank SensorsDokumen2 halamanQuestion Bank SensorsJasmine Kaur ButtarBelum ada peringkat
- Design Considerations For An LLC Resonant ConverterDokumen29 halamanDesign Considerations For An LLC Resonant Converterbacuoc.nguyen356Belum ada peringkat
- Op-Amp Basic Stages: Adama UniversityDokumen18 halamanOp-Amp Basic Stages: Adama Universitygebretsadkan abrhaBelum ada peringkat
- MergedDokumen34 halamanMergedmahamaniBelum ada peringkat
- High Voltage Direct Current Transmission: Converters, Systems and DC GridsDari EverandHigh Voltage Direct Current Transmission: Converters, Systems and DC GridsBelum ada peringkat
- Dynamics in One Complex Variable. (AM-160): (AM-160) - Third EditionDari EverandDynamics in One Complex Variable. (AM-160): (AM-160) - Third EditionBelum ada peringkat
- Lab Schedule Plan April 2017Dokumen3 halamanLab Schedule Plan April 2017Surenderan LoganBelum ada peringkat
- Assignment 3Dokumen7 halamanAssignment 3Surenderan LoganBelum ada peringkat
- MEHB493 - Lecture 5Dokumen91 halamanMEHB493 - Lecture 5Surenderan LoganBelum ada peringkat
- MEHB493 - Lecture 7bDokumen43 halamanMEHB493 - Lecture 7bSurenderan LoganBelum ada peringkat
- Internanional StandardsDokumen2.136 halamanInternanional Standardspktien30% (23)
- MEHB493 - Lecture 7aDokumen65 halamanMEHB493 - Lecture 7aSurenderan LoganBelum ada peringkat
- L1-3 - Nuclear Energy StakeholdersDokumen56 halamanL1-3 - Nuclear Energy StakeholdersSurenderan LoganBelum ada peringkat
- Test MethodsDokumen4 halamanTest MethodsSurenderan LoganBelum ada peringkat
- Fyp 2 Ghant ChartDokumen4 halamanFyp 2 Ghant ChartSurenderan LoganBelum ada peringkat
- L2 Radiation Management ProtectionDokumen93 halamanL2 Radiation Management ProtectionSurenderan LoganBelum ada peringkat
- JMS Progress Report 2 AdlanDokumen10 halamanJMS Progress Report 2 AdlanSurenderan LoganBelum ada peringkat
- What Are Nitrogen OxidesDokumen2 halamanWhat Are Nitrogen OxidesSurenderan LoganBelum ada peringkat
- Journal ReviewDokumen4 halamanJournal ReviewSurenderan LoganBelum ada peringkat
- L1-3 Nuclear Energy Stakeholders 1Dokumen45 halamanL1-3 Nuclear Energy Stakeholders 1Surenderan LoganBelum ada peringkat
- Vinod Anne MD ReportDokumen28 halamanVinod Anne MD ReportSurenderan LoganBelum ada peringkat
- Assignment 1 s2 1617Dokumen1 halamanAssignment 1 s2 1617Surenderan LoganBelum ada peringkat
- L1-2 - Role of Nuclear EngineersDokumen20 halamanL1-2 - Role of Nuclear EngineersSurenderan LoganBelum ada peringkat
- Test 2 SolutionDokumen6 halamanTest 2 SolutionSurenderan LoganBelum ada peringkat
- Graph of Current (μA) vs Distance (mm)Dokumen3 halamanGraph of Current (μA) vs Distance (mm)Surenderan LoganBelum ada peringkat
- COEB 432 Test 1 (Sample) (Sem 2, 2014-2015)Dokumen6 halamanCOEB 432 Test 1 (Sample) (Sem 2, 2014-2015)Surenderan LoganBelum ada peringkat
- Report MD Group ProjectDokumen38 halamanReport MD Group ProjectSurenderan Logan100% (1)
- Report MD Group ProjectDokumen38 halamanReport MD Group ProjectSurenderan Logan100% (1)
- 2 Gas Mixture ExerciseDokumen6 halaman2 Gas Mixture ExerciseSurenderan LoganBelum ada peringkat
- Mesb 443Dokumen2 halamanMesb 443Mohammad Hafiz OthmanBelum ada peringkat
- Belt Drive Experiment PDFDokumen9 halamanBelt Drive Experiment PDFFajar Rumanto100% (1)
- Intermediate ElementsDokumen18 halamanIntermediate ElementsSurenderan LoganBelum ada peringkat
- Homework 1 Dimesional Analysis and ModelingDokumen1 halamanHomework 1 Dimesional Analysis and ModelingSurenderan LoganBelum ada peringkat
- Exp#6 Head Loss Due To Pipe FittingDokumen4 halamanExp#6 Head Loss Due To Pipe FittingSurenderan Logan0% (1)
- Compilation Test 2Dokumen7 halamanCompilation Test 2Surenderan LoganBelum ada peringkat
- Teamcenter 10.1: Publication Number PLM00015 JDokumen122 halamanTeamcenter 10.1: Publication Number PLM00015 JmohanBelum ada peringkat
- Masking Conventional Metallic Cast Post For Enhancing EstheticsDokumen5 halamanMasking Conventional Metallic Cast Post For Enhancing EstheticsleilyanisariBelum ada peringkat
- Present Perfect Simp ContDokumen14 halamanPresent Perfect Simp ContLauGalindo100% (1)
- When SIBO & IBS-Constipation Are Just Unrecognized Thiamine DeficiencyDokumen3 halamanWhen SIBO & IBS-Constipation Are Just Unrecognized Thiamine Deficiencyps piasBelum ada peringkat
- Free ConvectionDokumen4 halamanFree ConvectionLuthfy AditiarBelum ada peringkat
- Do Now:: What Is Motion? Describe The Motion of An ObjectDokumen18 halamanDo Now:: What Is Motion? Describe The Motion of An ObjectJO ANTHONY ALIGORABelum ada peringkat
- 1en 02 PDFDokumen96 halaman1en 02 PDFAndrey100% (2)
- Sousa2019 PDFDokumen38 halamanSousa2019 PDFWilly PurbaBelum ada peringkat
- DADTCO Presentation PDFDokumen34 halamanDADTCO Presentation PDFIngeniería Industrias Alimentarias Itsm100% (1)
- Industrial Motor Control Part IDokumen38 halamanIndustrial Motor Control Part Ikibrom atsbha100% (2)
- VTB Datasheet PDFDokumen24 halamanVTB Datasheet PDFNikola DulgiarovBelum ada peringkat
- LAB REPORT - MGCLDokumen5 halamanLAB REPORT - MGCLKali stringsBelum ada peringkat
- Royal British College Dancesport TeamDokumen10 halamanRoyal British College Dancesport TeamAnna rose CabatinganBelum ada peringkat
- Gold Loan Application FormDokumen7 halamanGold Loan Application FormMahesh PittalaBelum ada peringkat
- Cummins: ISX15 CM2250Dokumen17 halamanCummins: ISX15 CM2250haroun100% (4)
- 1.classification of Reciprocating PumpsDokumen8 halaman1.classification of Reciprocating Pumpsgonri lynnBelum ada peringkat
- Nbme NotesDokumen3 halamanNbme NotesShariq AkramBelum ada peringkat
- Bassoon (FAGOT) : See AlsoDokumen36 halamanBassoon (FAGOT) : See Alsocarlos tarancón0% (1)
- Task of ProjectDokumen14 halamanTask of ProjectAbdul Wafiy NaqiuddinBelum ada peringkat
- Bullying Report - Ending The Torment: Tackling Bullying From The Schoolyard To CyberspaceDokumen174 halamanBullying Report - Ending The Torment: Tackling Bullying From The Schoolyard To CyberspaceAlexandre AndréBelum ada peringkat
- Reinforced Concrete Design PDFDokumen1 halamanReinforced Concrete Design PDFhallelBelum ada peringkat
- Final LUS EvaluationDokumen36 halamanFinal LUS EvaluationNextgenBelum ada peringkat
- 3-Phase Short-Circuit Current (Isc) at Any Point Within A LV Installation - Electrical Installation GuideDokumen6 halaman3-Phase Short-Circuit Current (Isc) at Any Point Within A LV Installation - Electrical Installation GuideYuukinoriBelum ada peringkat
- Sistemas de Mando CST Cat (Ing)Dokumen12 halamanSistemas de Mando CST Cat (Ing)Carlos Alfredo LauraBelum ada peringkat
- IPC PL 11 006 MS Auditors Issue 7.05Dokumen32 halamanIPC PL 11 006 MS Auditors Issue 7.05saladinBelum ada peringkat
- WD Support Warranty Services Business Return Material Authorization RMA Pre Mailer For ResellerDokumen3 halamanWD Support Warranty Services Business Return Material Authorization RMA Pre Mailer For ResellerZowl SaidinBelum ada peringkat
- Review Course 2 (Review On Professional Education Courses)Dokumen8 halamanReview Course 2 (Review On Professional Education Courses)Regie MarcosBelum ada peringkat
- S4 Computer Sciences Exercises PDFDokumen2 halamanS4 Computer Sciences Exercises PDFHenriette Desanges UwayoBelum ada peringkat
- XXXX96 01 01 2023to28 08 2023Dokumen18 halamanXXXX96 01 01 2023to28 08 2023dabu choudharyBelum ada peringkat
- Pre-Paid Customer Churn Prediction Using SPSSDokumen18 halamanPre-Paid Customer Churn Prediction Using SPSSabhi1098Belum ada peringkat