Anda mungkin juga menyukai
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- RT 31026042019Dokumen1 halamanRT 31026042019Syed AshmadBelum ada peringkat
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- Digital Design Through Verilog HDL Course Outcomes For LabDokumen1 halamanDigital Design Through Verilog HDL Course Outcomes For LabSyed AshmadBelum ada peringkat
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- WWW - Manaresults.co - In: Applications (Common To ECE, ETM)Dokumen2 halamanWWW - Manaresults.co - In: Applications (Common To ECE, ETM)Syed AshmadBelum ada peringkat
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- ERTOS Course OutcomesDokumen2 halamanERTOS Course OutcomesSyed AshmadBelum ada peringkat
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- X RayDokumen18 halamanX RaySyed AshmadBelum ada peringkat
- III - I R09 Regular Dec 2013Dokumen162 halamanIII - I R09 Regular Dec 2013Syed AshmadBelum ada peringkat
- Iii-I R09 Dec 2014 Result PDFDokumen184 halamanIii-I R09 Dec 2014 Result PDFSyed AshmadBelum ada peringkat
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (400)
- Verilog Code For Basic Logic GatesDokumen4 halamanVerilog Code For Basic Logic GatesSyed AshmadBelum ada peringkat
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- DIP and Soft Computing SyllabusDokumen5 halamanDIP and Soft Computing SyllabusSyed AshmadBelum ada peringkat
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- An Image Processing Algorithm To Estimate Bone2017Dokumen4 halamanAn Image Processing Algorithm To Estimate Bone2017Syed AshmadBelum ada peringkat
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- III-I R09 DEC 2014 RESULT (12 Batch)Dokumen551 halamanIII-I R09 DEC 2014 RESULT (12 Batch)Syed AshmadBelum ada peringkat
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- 16ECE315-Digital Design Through Verilog HDLDokumen1 halaman16ECE315-Digital Design Through Verilog HDLSyed AshmadBelum ada peringkat
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- Development of Timing and State Diagrams Refined The Block Diagram Cleaned Up and Added Better Names, Added DetailDokumen21 halamanDevelopment of Timing and State Diagrams Refined The Block Diagram Cleaned Up and Added Better Names, Added DetailSyed AshmadBelum ada peringkat
- Operators 140917230056 Phpapp01Dokumen20 halamanOperators 140917230056 Phpapp01Syed AshmadBelum ada peringkat
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- Digital Design and Synthesis: Behavioral VerilogDokumen41 halamanDigital Design and Synthesis: Behavioral VerilogSyed AshmadBelum ada peringkat
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (345)
- IO Ports in 8051Dokumen8 halamanIO Ports in 8051Syed AshmadBelum ada peringkat
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (74)
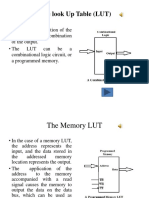
- The Look Up Table (LUT)Dokumen5 halamanThe Look Up Table (LUT)Syed AshmadBelum ada peringkat
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
- Verilog HDL BasicsDokumen73 halamanVerilog HDL BasicsSyed AshmadBelum ada peringkat
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- CH 01Dokumen37 halamanCH 01Kiran EceBelum ada peringkat
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- Global Geo Reviewer MidtermDokumen29 halamanGlobal Geo Reviewer Midtermbusinesslangto5Belum ada peringkat
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- Talking Art As The Spirit Moves UsDokumen7 halamanTalking Art As The Spirit Moves UsUCLA_SPARCBelum ada peringkat
- B. Geoinformatics PDFDokumen77 halamanB. Geoinformatics PDFmchakra720% (1)
- Blue Prism Data Sheet - Provisioning A Blue Prism Database ServerDokumen5 halamanBlue Prism Data Sheet - Provisioning A Blue Prism Database Serverreddy_vemula_praveenBelum ada peringkat
- Salads: 300 Salad Recipes For Rapid Weight Loss & Clean Eating (PDFDrive) PDFDokumen1.092 halamanSalads: 300 Salad Recipes For Rapid Weight Loss & Clean Eating (PDFDrive) PDFDebora PanzarellaBelum ada peringkat
- Countries EXCESS DEATHS All Ages - 15nov2021Dokumen21 halamanCountries EXCESS DEATHS All Ages - 15nov2021robaksBelum ada peringkat
- Digital MetersDokumen47 halamanDigital MetersherovhungBelum ada peringkat
- Sindi and Wahab in 18th CenturyDokumen9 halamanSindi and Wahab in 18th CenturyMujahid Asaadullah AbdullahBelum ada peringkat
- 2SB817 - 2SD1047 PDFDokumen4 halaman2SB817 - 2SD1047 PDFisaiasvaBelum ada peringkat
- Lesson 6 ComprogDokumen25 halamanLesson 6 ComprogmarkvillaplazaBelum ada peringkat
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (121)
- 18 June 2020 12:03: New Section 1 Page 1Dokumen4 halaman18 June 2020 12:03: New Section 1 Page 1KarthikNayakaBelum ada peringkat
- Farmer Producer Companies in OdishaDokumen34 halamanFarmer Producer Companies in OdishaSuraj GantayatBelum ada peringkat
- Costbenefit Analysis 2015Dokumen459 halamanCostbenefit Analysis 2015TRÂM NGUYỄN THỊ BÍCHBelum ada peringkat
- Anatomy Anal CanalDokumen14 halamanAnatomy Anal CanalBela Ronaldoe100% (1)
- The JHipster Mini Book 2Dokumen129 halamanThe JHipster Mini Book 2tyulist100% (1)
- Nama: Yossi Tiara Pratiwi Kelas: X Mis 1 Mata Pelajaran: Bahasa InggrisDokumen2 halamanNama: Yossi Tiara Pratiwi Kelas: X Mis 1 Mata Pelajaran: Bahasa InggrisOrionj jrBelum ada peringkat
- IMS Objectives Targets 2Dokumen2 halamanIMS Objectives Targets 2FaridUddin Ahmed100% (3)
- CEE Annual Report 2018Dokumen100 halamanCEE Annual Report 2018BusinessTech100% (1)
- Test Your Knowledge - Study Session 1Dokumen4 halamanTest Your Knowledge - Study Session 1My KhanhBelum ada peringkat
- Dynamics of Machinery PDFDokumen18 halamanDynamics of Machinery PDFThomas VictorBelum ada peringkat
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- Theory GraphDokumen23 halamanTheory GraphArthur CarabioBelum ada peringkat
- Log Building News - Issue No. 76Dokumen32 halamanLog Building News - Issue No. 76ursindBelum ada peringkat
- Marketing FinalDokumen15 halamanMarketing FinalveronicaBelum ada peringkat
- Test ScienceDokumen2 halamanTest Sciencejam syBelum ada peringkat
- Stress-Strain Modelfor Grade275 Reinforcingsteel With Cyclic LoadingDokumen9 halamanStress-Strain Modelfor Grade275 Reinforcingsteel With Cyclic LoadingRory Cristian Cordero RojoBelum ada peringkat
- Technical Bulletin LXL: No. Subject Release DateDokumen8 halamanTechnical Bulletin LXL: No. Subject Release DateTrunggana AbdulBelum ada peringkat
- Project ManagementDokumen11 halamanProject ManagementBonaventure NzeyimanaBelum ada peringkat
- KP Tevta Advertisement 16-09-2019Dokumen4 halamanKP Tevta Advertisement 16-09-2019Ishaq AminBelum ada peringkat
- Review1 ScheduleDokumen3 halamanReview1 Schedulejayasuryam.ae18Belum ada peringkat
- Problem Set-02Dokumen2 halamanProblem Set-02linn.pa.pa.khaing.2020.2021.fbBelum ada peringkat