Anda mungkin juga menyukai
- Understanding Ship Stability and Buoyancy ForcesDokumen7 halamanUnderstanding Ship Stability and Buoyancy ForcesRahul Phadake100% (1)
- Free Surface Effect and CalculationDokumen34 halamanFree Surface Effect and CalculationJuan Alberto Pájaro Castilla50% (2)
- Ship S Stability PDFDokumen17 halamanShip S Stability PDFKalaivani PeriyasamyBelum ada peringkat
- Stability NotesDokumen17 halamanStability Notesnithin manimaranBelum ada peringkat
- Why Initial Met Height at 1 RadianDokumen9 halamanWhy Initial Met Height at 1 RadianRanjeet SinghBelum ada peringkat
- Wall Sided FormulaDokumen38 halamanWall Sided FormulaMarville Cullen Provido Espago75% (4)
- Microsoft PowerPoint - Stability at Small Angles (Compatibility Mode)Dokumen37 halamanMicrosoft PowerPoint - Stability at Small Angles (Compatibility Mode)Mugilrajan DevarajanBelum ada peringkat
- Ensuring Excellence at Sea through Naval ArchitectureDokumen21 halamanEnsuring Excellence at Sea through Naval ArchitectureNeo Miala100% (2)
- Basic StabilityDokumen63 halamanBasic StabilityVennyse Rabadon100% (2)
- STABILITY AND TRIM DEFINITIONSDokumen27 halamanSTABILITY AND TRIM DEFINITIONSДмитрий ЯрычBelum ada peringkat
- Determining hydrostatic particulars and stability metrics for shipsDokumen68 halamanDetermining hydrostatic particulars and stability metrics for shipssubhenduhatiBelum ada peringkat
- Trim or Longitudinal StabilityDokumen5 halamanTrim or Longitudinal StabilityA JSprBelum ada peringkat
- Ship Stability - BASIC PRINCIPLESDokumen82 halamanShip Stability - BASIC PRINCIPLESshyam subramaniBelum ada peringkat
- Ship Stability and Cargo CalculationsDokumen31 halamanShip Stability and Cargo CalculationsGeorge PonparauBelum ada peringkat
- DefinitionsDokumen3 halamanDefinitionsAhmed AboelmagdBelum ada peringkat
- Chapter 10 - Curves of Statical Stability (GZ Curves)Dokumen9 halamanChapter 10 - Curves of Statical Stability (GZ Curves)Adrian B.100% (1)
- Calculating ship stability using hydrostatic curvesDokumen10 halamanCalculating ship stability using hydrostatic curvesjonas lintagBelum ada peringkat
- RINA - Trim & Stability BookletDokumen5 halamanRINA - Trim & Stability Bookletkevin kurnia marpaungBelum ada peringkat
- Damage StabilityDokumen11 halamanDamage Stabilitypolaris25100% (1)
- Basic PrinciplesDokumen11 halamanBasic PrinciplesAshok KumarBelum ada peringkat
- Module 1 - Dynamical StabilityDokumen22 halamanModule 1 - Dynamical StabilityAjay W Dhiman100% (1)
- Module 2 - Free Surface EffectsDokumen27 halamanModule 2 - Free Surface EffectsAjay W DhimanBelum ada peringkat
- 15 - 12 Calculating KB, BM and Metacentric DiagramsDokumen8 halaman15 - 12 Calculating KB, BM and Metacentric DiagramsAzis Elis-Elvis100% (1)
- Cargo and Trim Problems SolvedDokumen8 halamanCargo and Trim Problems SolvedGeorge CarinoBelum ada peringkat
- BilgingDokumen24 halamanBilgingsreedharsree45gmBelum ada peringkat
- The Inclining ExperimentDokumen4 halamanThe Inclining ExperimentMDBelum ada peringkat
- Review in FWA and DWA Problem SolvingDokumen7 halamanReview in FWA and DWA Problem SolvingBerbaño, Jan JoshuaBelum ada peringkat
- Trim and Stability Definitions of Terms UpdatedDokumen5 halamanTrim and Stability Definitions of Terms UpdatedJazmin GolosoBelum ada peringkat
- A General Discussion On Ship StabilityDokumen6 halamanA General Discussion On Ship StabilityAnonymous UCveMQBelum ada peringkat
- NAME 157: Hydrostatics & StabilityDokumen28 halamanNAME 157: Hydrostatics & StabilityM HASIN ISHMAM JEETBelum ada peringkat
- Deterministic Damage Stability PDFDokumen44 halamanDeterministic Damage Stability PDFUngke KansilBelum ada peringkat
- Calculation of TrimDokumen5 halamanCalculation of TrimASGHAR100% (2)
- Calculating ship stability and performance metricsDokumen31 halamanCalculating ship stability and performance metricsStaicu-Anghel ElenaBelum ada peringkat
- Stability Theory IIIDokumen32 halamanStability Theory IIISergio RuedaBelum ada peringkat
- Centre of FloatationDokumen7 halamanCentre of FloatationBlack HawkBelum ada peringkat
- 08-NAC-Curves of Stability and Stability Criteria (160213)Dokumen17 halaman08-NAC-Curves of Stability and Stability Criteria (160213)G SagunaBelum ada peringkat
- Inclining ExperimentDokumen7 halamanInclining ExperimentBharatiyulam100% (2)
- Fresh Water AllowanceDokumen2 halamanFresh Water AllowanceFelino SibonghanoyBelum ada peringkat
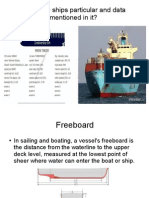
- FreeboardDokumen12 halamanFreeboardRodneyBelum ada peringkat
- Shear Force and Bending Moment in ShipsDokumen42 halamanShear Force and Bending Moment in ShipsRijul Joshi83% (6)
- 1011 - Hydrostatic Curves - GZ & KN Cross Curves - IntroductionDokumen33 halaman1011 - Hydrostatic Curves - GZ & KN Cross Curves - Introductionfarrell100% (1)
- Metacentric HeightDokumen6 halamanMetacentric HeightKeyboardMan1960Belum ada peringkat
- Stability BookletDokumen27 halamanStability BookletArun Singh100% (3)
- Ship Turning Circle AngleDokumen11 halamanShip Turning Circle AngleInsan AhammadBelum ada peringkat
- NA Problems 1Dokumen3 halamanNA Problems 1siddarth amaravathi100% (1)
- CHS July ADokumen148 halamanCHS July AStaicu-Anghel ElenaBelum ada peringkat
- Unit IDokumen24 halamanUnit IsomasundaramBelum ada peringkat
- Dynamic StabilityDokumen4 halamanDynamic Stabilitytony ogbinar0% (1)
- What Is International Grain CodeDokumen3 halamanWhat Is International Grain CodeJames JarabeloBelum ada peringkat
- CHS July ADokumen148 halamanCHS July AGeorge PonparauBelum ada peringkat
- Calculating ship stability and displacement parametersDokumen46 halamanCalculating ship stability and displacement parametersAljohn Nanez100% (2)
- General Stability QuestionsDokumen33 halamanGeneral Stability QuestionsAnonymous nF3tseUAGeBelum ada peringkat
- Boat Design - Stability FundementalsDokumen12 halamanBoat Design - Stability Fundementalskjourf388Belum ada peringkat
- Introduction To TSSDokumen11 halamanIntroduction To TSSnoczviviBelum ada peringkat
- Fse On Ship StabilityDokumen34 halamanFse On Ship StabilityVinodh KumarBelum ada peringkat
- Statical Stability Key ConceptsDokumen24 halamanStatical Stability Key ConceptschriscarldelimaBelum ada peringkat
- Stability under small angles of heel - GM, GZ, and righting momentDokumen12 halamanStability under small angles of heel - GM, GZ, and righting momentIrakli ShavishviliBelum ada peringkat
- Ship StabilityDokumen12 halamanShip StabilityribbyBelum ada peringkat
- HNC Nautical Science: Unit Code: F0LD 34 Ship Stability Outcome 3 - Statical StabilityDokumen40 halamanHNC Nautical Science: Unit Code: F0LD 34 Ship Stability Outcome 3 - Statical StabilityRan OronceBelum ada peringkat
- Week 5 OOW Transvers Statice StabilityDokumen18 halamanWeek 5 OOW Transvers Statice StabilityAmin Al QawasmehBelum ada peringkat
- Answer Pump NCBDokumen6 halamanAnswer Pump NCBAbdallah MansourBelum ada peringkat
- Pumps TypesDokumen14 halamanPumps TypesAbdallah Mansour100% (1)
- Valve and Safety Device TypesDokumen8 halamanValve and Safety Device TypesAbdallah MansourBelum ada peringkat
- Perforating Technology: China National Logging CorpDokumen39 halamanPerforating Technology: China National Logging Corpdarryl_gilbertBelum ada peringkat
- Technology Gets To The Root of Pipe WeldingDokumen2 halamanTechnology Gets To The Root of Pipe WeldingAbdallah MansourBelum ada peringkat
- 3 Idc99courseDokumen50 halaman3 Idc99coursebintangsatuBelum ada peringkat
- Technology Gets To The Root of Pipe WeldingDokumen2 halamanTechnology Gets To The Root of Pipe WeldingAbdallah MansourBelum ada peringkat
- Types of Pumps-1Dokumen8 halamanTypes of Pumps-1Abdallah MansourBelum ada peringkat
- Globe, gate, check, relief valvesDokumen12 halamanGlobe, gate, check, relief valvesAbdallah MansourBelum ada peringkat
- Making Decisions With InsulationDokumen12 halamanMaking Decisions With InsulationAbdallah MansourBelum ada peringkat
- Perforating Technology: China National Logging CorpDokumen39 halamanPerforating Technology: China National Logging Corpdarryl_gilbertBelum ada peringkat
- Petroleum (1) .PPT (Recovered)Dokumen33 halamanPetroleum (1) .PPT (Recovered)Abdallah MansourBelum ada peringkat
- Structural Eng 7-12-06Dokumen21 halamanStructural Eng 7-12-06Abdallah MansourBelum ada peringkat
- Gas Sweetening FacilityDokumen28 halamanGas Sweetening FacilityAbdallah MansourBelum ada peringkat
- CastingDokumen9 halamanCastingAbdallah MansourBelum ada peringkat
- Casting ProcessesDokumen56 halamanCasting ProcessesAbdallah MansourBelum ada peringkat
- Cast IronsDokumen34 halamanCast IronsAbdallah MansourBelum ada peringkat
- Vibration Quick ReferenceDokumen49 halamanVibration Quick Referencekeepmoshing2Belum ada peringkat
- Basic Principles of Ultrasonic TestingDokumen42 halamanBasic Principles of Ultrasonic TestingAbdallah MansourBelum ada peringkat
- Stainless SteelDokumen34 halamanStainless SteelMohammed HilalBelum ada peringkat
- Atomic BondsDokumen13 halamanAtomic BondsAbdallah MansourBelum ada peringkat
- Stainless Steel 2Dokumen33 halamanStainless Steel 2Abdallah MansourBelum ada peringkat
- Material TechnologyDokumen9 halamanMaterial TechnologyAbdallah MansourBelum ada peringkat
- Eng. Khalid Mohamed Hafez Osaka Uni., JapanDokumen6 halamanEng. Khalid Mohamed Hafez Osaka Uni., Japanأحمد دعبسBelum ada peringkat
- Material StructureDokumen8 halamanMaterial StructureAbdallah MansourBelum ada peringkat
- FracturesDokumen42 halamanFracturesAbdallah MansourBelum ada peringkat
- Essential Variables of SmawDokumen7 halamanEssential Variables of SmawAbdallah Mansour100% (6)
- Atomic BondsDokumen13 halamanAtomic BondsAbdallah MansourBelum ada peringkat
- AFA II III OilDokumen74 halamanAFA II III OilAbdallah Mansour100% (1)
- MEL 417 Lubrication Lec 170311Dokumen17 halamanMEL 417 Lubrication Lec 170311Akash NairBelum ada peringkat
- Understanding Process ConditionsDokumen41 halamanUnderstanding Process ConditionsIbrahim Al-HammadiBelum ada peringkat
- Job 1 SksoDokumen5 halamanJob 1 SksoFajAr OkTaBelum ada peringkat
- Cics Class 05Dokumen18 halamanCics Class 05HarithaBelum ada peringkat
- BS 2995-1966 PDFDokumen15 halamanBS 2995-1966 PDF윤규섭Belum ada peringkat
- Amber & Company: A Reliable Company of WaterproofingDokumen20 halamanAmber & Company: A Reliable Company of WaterproofingRaj PatilBelum ada peringkat
- ASME - Performance Test CodesDokumen1 halamanASME - Performance Test CodesanoopkntpcBelum ada peringkat
- Matrix Inversion Note in Mathematics MagazineDokumen2 halamanMatrix Inversion Note in Mathematics Magazinejuan carlos molano toroBelum ada peringkat
- ME4111 Engineering and Mechanical PrinciplesDokumen5 halamanME4111 Engineering and Mechanical PrinciplesEdvard StarcevBelum ada peringkat
- Mste 3.0 Plane Geometry Hand OutsDokumen8 halamanMste 3.0 Plane Geometry Hand OutsJasmine MartinezBelum ada peringkat
- 3 - Molecules and Compounds: Practice TestDokumen2 halaman3 - Molecules and Compounds: Practice Testfamily_jvcBelum ada peringkat
- Analysis of Structure of C Type Hydraulic PressDokumen10 halamanAnalysis of Structure of C Type Hydraulic PressShubhamBelum ada peringkat
- Smart Card/Proximity Based Vehicle Identification & Access Control SystemDokumen4 halamanSmart Card/Proximity Based Vehicle Identification & Access Control SystemkarunamoorthiBelum ada peringkat
- Molecular Cell Biology Lodish 7th Edition Solutions ManualDokumen8 halamanMolecular Cell Biology Lodish 7th Edition Solutions ManualmarisorbornewwssBelum ada peringkat
- BMW M5 ConfigurationDokumen12 halamanBMW M5 ConfigurationprasadBelum ada peringkat
- Water Pinch PresentationDokumen14 halamanWater Pinch PresentationDafiMaboBelum ada peringkat
- Fix Disk & Partition ErrorsDokumen2 halamanFix Disk & Partition Errorsdownload181Belum ada peringkat
- D Lucky Labeling of Graphs PDFDokumen6 halamanD Lucky Labeling of Graphs PDFtony augustineBelum ada peringkat
- 3-Lecture 03 Translational Mechanical System3-SDokumen23 halaman3-Lecture 03 Translational Mechanical System3-SHamza KhanBelum ada peringkat
- Alkali Boil Out ProcedureDokumen7 halamanAlkali Boil Out Procedureismail karmanaBelum ada peringkat
- Compressed Air Operated Vacuum Waste Removal: Systems and ComponentsDokumen20 halamanCompressed Air Operated Vacuum Waste Removal: Systems and ComponentsDaniel RukawaBelum ada peringkat
- Maintenance Checklist: Macan/S/GTS/Turbo (2015-On)Dokumen2 halamanMaintenance Checklist: Macan/S/GTS/Turbo (2015-On)edk34100% (1)
- Introduction To Business Statistics: ProbabilityDokumen2 halamanIntroduction To Business Statistics: ProbabilityNghĩa PhùngBelum ada peringkat
- Design of LQR Controller For The Inverted Pendulum: Lili Wan, Juan Lei, Hongxia WuDokumen5 halamanDesign of LQR Controller For The Inverted Pendulum: Lili Wan, Juan Lei, Hongxia WuVictor PassosBelum ada peringkat
- Selection: Open-Type Reciprocating Compressors: Input ValuesDokumen1 halamanSelection: Open-Type Reciprocating Compressors: Input ValuesYuli RahmawatiBelum ada peringkat
- Inductive TransducersDokumen12 halamanInductive TransducersMUKESH SUNDARARAJANBelum ada peringkat
- Computational Intelligence in Communications and Business AnalyticsDokumen369 halamanComputational Intelligence in Communications and Business AnalyticsSourasish NathBelum ada peringkat
- DCT Dual Clutch TransmissionDokumen16 halamanDCT Dual Clutch TransmissionSudharshan SrinathBelum ada peringkat
- Flow Chart SymbolsDokumen7 halamanFlow Chart SymbolsAbhishekBelum ada peringkat
- 384 TungaloyDokumen32 halaman384 Tungaloyp.designBelum ada peringkat
- Tutorial - Lecture 3 SolutionsDokumen10 halamanTutorial - Lecture 3 SolutionsBastián Olfos MárquezBelum ada peringkat