Anda mungkin juga menyukai
- Problems in Quantum Mechanics: Third EditionDari EverandProblems in Quantum Mechanics: Third EditionPenilaian: 3 dari 5 bintang3/5 (2)
- LQR Linear Quadratic Regulator: A State Space Optimal Control Technique Brett ShapiroDokumen41 halamanLQR Linear Quadratic Regulator: A State Space Optimal Control Technique Brett ShapirorameshsmeBelum ada peringkat
- KalmanDokumen34 halamanKalmanbilal309Belum ada peringkat
- Understanding and Applying Kalman FilterDokumen34 halamanUnderstanding and Applying Kalman FilterNahom GirmaBelum ada peringkat
- Kalman Filter Deriv PDFDokumen29 halamanKalman Filter Deriv PDFgeorgez111100% (1)
- Understanding and Applying Kalman FilteringDokumen37 halamanUnderstanding and Applying Kalman FilteringosamazimBelum ada peringkat
- The Extended Kalman Filter: An Interactive Tutorial For Non ExpertsDokumen17 halamanThe Extended Kalman Filter: An Interactive Tutorial For Non Expertsmago876Belum ada peringkat
- Tutorial KFDokumen13 halamanTutorial KFkidusBelum ada peringkat
- Alireza JavaheriDokumen17 halamanAlireza JavaheriAloke ChatterjeeBelum ada peringkat
- CY4A2 Advanced System Identification Lecture 7: The Kalman Filter (less than 40 charsDokumen25 halamanCY4A2 Advanced System Identification Lecture 7: The Kalman Filter (less than 40 charsChristian OkregheBelum ada peringkat
- Kalman Filter IntroductionDokumen16 halamanKalman Filter Introductionlequn chenBelum ada peringkat
- L4-1 KalmanDokumen24 halamanL4-1 Kalmanhu jackBelum ada peringkat
- Kalman and Bayesian Filters in PythonDokumen17 halamanKalman and Bayesian Filters in PythonAndrew FongBelum ada peringkat
- CSSE463: Image Recognition Day 31 This WeekDokumen11 halamanCSSE463: Image Recognition Day 31 This WeekadarshsasidharanBelum ada peringkat
- Module 2 Lesson 4: An Improved Ekf: The Error-State Extended KalmanDokumen12 halamanModule 2 Lesson 4: An Improved Ekf: The Error-State Extended KalmanMary JusticeBelum ada peringkat
- 1984 - Generalized Linear-Least-Squares Recursive Estimators For Systems With Uncertain Observations - SMostafa (2022!10!29) #XXXXX Egypt - U CairoDokumen2 halaman1984 - Generalized Linear-Least-Squares Recursive Estimators For Systems With Uncertain Observations - SMostafa (2022!10!29) #XXXXX Egypt - U CairoMahmoud El-hadidiBelum ada peringkat
- Lecture 7Dokumen3 halamanLecture 7amanmatharu22Belum ada peringkat
- Laaraiedh PythonPapers KalmanDokumen5 halamanLaaraiedh PythonPapers KalmanRyan DavisBelum ada peringkat
- Module 2 Lesson 3: Going Nonlinear: The Extended Kalman FilterDokumen14 halamanModule 2 Lesson 3: Going Nonlinear: The Extended Kalman FilterMary JusticeBelum ada peringkat
- Particle Filtering: Emin Orhan Eorhan@bcs - Rochester.eduDokumen6 halamanParticle Filtering: Emin Orhan Eorhan@bcs - Rochester.eduEngr EbiBelum ada peringkat
- Kalman Filter State Estimation of an Inverted Pendulum SystemDokumen15 halamanKalman Filter State Estimation of an Inverted Pendulum SystemdhineshpBelum ada peringkat
- Chapter 4 (Lecture 7 (Kalman Filter - RD) )Dokumen11 halamanChapter 4 (Lecture 7 (Kalman Filter - RD) )umarsaboBelum ada peringkat
- Bayesian Filtering Techniques: Kalman and Extended Kalman Filter BasicsDokumen4 halamanBayesian Filtering Techniques: Kalman and Extended Kalman Filter Basicsali_raza117Belum ada peringkat
- Lecture 11: Kalman Filters: CS 344R: Robotics Benjamin KuipersDokumen19 halamanLecture 11: Kalman Filters: CS 344R: Robotics Benjamin KuipersK.RamachandranBelum ada peringkat
- An Introduction To The Kalman Filter - Greg Welch and Gary BishopDokumen16 halamanAn Introduction To The Kalman Filter - Greg Welch and Gary BishophemanthBelum ada peringkat
- Extended Kalman Filters - MATLAB & Simulink - MathWorks AustraliaDokumen11 halamanExtended Kalman Filters - MATLAB & Simulink - MathWorks AustraliaHimanshu PotaBelum ada peringkat
- Lecture 5Dokumen16 halamanLecture 5Adityan Ilmawan PutraBelum ada peringkat
- Kalman and Extended Kalman Filters ConceDokumen44 halamanKalman and Extended Kalman Filters ConceLOVE INDIABelum ada peringkat
- Kalman Filter ShoudongDokumen7 halamanKalman Filter Shoudongteju1996cool100% (1)
- Time Series Prediction by Kalman SmootherDokumen5 halamanTime Series Prediction by Kalman SmootherЮрий ЗемсковBelum ada peringkat
- Mathematical Statistics - Kalman Filter Equation Derivation - Cross ValidatedDokumen4 halamanMathematical Statistics - Kalman Filter Equation Derivation - Cross ValidatedMuhammad HaroonBelum ada peringkat
- Hidden Markov Models: CH 3.2, 3.2 of DEKMDokumen27 halamanHidden Markov Models: CH 3.2, 3.2 of DEKMDhashrath RaguramanBelum ada peringkat
- Understanding and Applying Kalman FilteringDokumen37 halamanUnderstanding and Applying Kalman FilteringKoustuvGaraiBelum ada peringkat
- 4F3 - Unconstrained Predictive ControlDokumen27 halaman4F3 - Unconstrained Predictive ControlsamandondonBelum ada peringkat
- Module 2 Lesson 1: The Kalman FilterDokumen14 halamanModule 2 Lesson 1: The Kalman FilterVictor Carhuaricra SeguraBelum ada peringkat
- Module 2 Lesson 1: The Kalman FilterDokumen14 halamanModule 2 Lesson 1: The Kalman FilterMary JusticeBelum ada peringkat
- An Introduction To The Kalman FilterDokumen16 halamanAn Introduction To The Kalman FilterrsudjianBelum ada peringkat
- kalman_filteringDokumen15 halamankalman_filteringCường Lê VănBelum ada peringkat
- State-space control system designDokumen15 halamanState-space control system designTalha YasinBelum ada peringkat
- L1 State Space AnalysisDokumen34 halamanL1 State Space AnalysisRudra MishraBelum ada peringkat
- State Estimation TechniquesDokumen7 halamanState Estimation TechniquesyuniervBelum ada peringkat
- Robust Video Stabilization Using Particle Filter TrackingDokumen45 halamanRobust Video Stabilization Using Particle Filter TrackingOwais ShahBelum ada peringkat
- Nonlinear Quadratic Dynamic Matrix Control With State EstimationDokumen32 halamanNonlinear Quadratic Dynamic Matrix Control With State EstimationLetian WangBelum ada peringkat
- Introduction To Kalman FilterDokumen4 halamanIntroduction To Kalman FilterArghya MukherjeeBelum ada peringkat
- Kalman FilterDokumen11 halamanKalman FilterSanjay Kumar GuptaBelum ada peringkat
- Linear Quadratic Regulator (LQR) State Feedback Design: R T U R T XDokumen10 halamanLinear Quadratic Regulator (LQR) State Feedback Design: R T U R T XrameshsmeBelum ada peringkat
- Controllability and ObservabilityDokumen23 halamanControllability and ObservabilityJhon CerónBelum ada peringkat
- Lacey Thacker TutorialDokumen10 halamanLacey Thacker TutorialWilliam Pinto HernándezBelum ada peringkat
- Kalman Filters: CS 344R: Robotics Benjamin KuipersDokumen19 halamanKalman Filters: CS 344R: Robotics Benjamin KuipersadarshsasidharanBelum ada peringkat
- Slides - Multi-Object TrackingDokumen38 halamanSlides - Multi-Object TrackingDaniloBelum ada peringkat
- ch4 KFderivDokumen22 halamanch4 KFderivaleksandarpmauBelum ada peringkat
- Conditional Gradient (Frank-Wolfe) Method: Lecturer: Javier Pe Na Convex Optimization 10-725/36-725Dokumen28 halamanConditional Gradient (Frank-Wolfe) Method: Lecturer: Javier Pe Na Convex Optimization 10-725/36-725Nguyễn Quang HuyBelum ada peringkat
- Higher Order Sigma Point Filter for Ballistic Target TrackingDokumen22 halamanHigher Order Sigma Point Filter for Ballistic Target Trackings_bhaumikBelum ada peringkat
- Estimation of Saturated Data Using The Tobit Kalman FilterDokumen6 halamanEstimation of Saturated Data Using The Tobit Kalman FilterParrex ParraBelum ada peringkat
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)Dari EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)Belum ada peringkat
- Difference Equations in Normed Spaces: Stability and OscillationsDari EverandDifference Equations in Normed Spaces: Stability and OscillationsBelum ada peringkat
- La Noche: Francisco DomínguezDokumen13 halamanLa Noche: Francisco DomínguezwerwerwerBelum ada peringkat
- Francisco Domínguez: For OrchestraDokumen14 halamanFrancisco Domínguez: For OrchestrawerwerwerBelum ada peringkat
- 3-Sink-Cleanupstamp Letter COLOR PDFDokumen1 halaman3-Sink-Cleanupstamp Letter COLOR PDFwerwerwerBelum ada peringkat
- CaretDokumen10 halamanCaretwerwerwerBelum ada peringkat
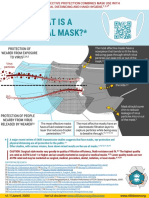
- What Is A Surgical Mask? : Protection of Wearer From Exposure To VirusDokumen1 halamanWhat Is A Surgical Mask? : Protection of Wearer From Exposure To ViruswerwerwerBelum ada peringkat
- Lecture - Point Pattern AnalysisDokumen26 halamanLecture - Point Pattern AnalysiswerwerwerBelum ada peringkat
- Guidance for Cleaning Bodily FluidsDokumen10 halamanGuidance for Cleaning Bodily FluidswerwerwerBelum ada peringkat
- COVID N95 DECON & REUSE TIME CONSIDERATIONSDokumen1 halamanCOVID N95 DECON & REUSE TIME CONSIDERATIONSwerwerwerBelum ada peringkat
- N95 Schematic Release v15Dokumen1 halamanN95 Schematic Release v15werwerwerBelum ada peringkat
- CBC COVID19 Product List 4 - 23 - 2020 PDFDokumen17 halamanCBC COVID19 Product List 4 - 23 - 2020 PDFwerwerwerBelum ada peringkat
- Implementing White's Reality Check MethodDokumen6 halamanImplementing White's Reality Check MethodwerwerwerBelum ada peringkat
- Guide To Reading Your Data File (GDPR)Dokumen4 halamanGuide To Reading Your Data File (GDPR)werwerwerBelum ada peringkat
- Gs Short ExDokumen135 halamanGs Short ExwerwerwerBelum ada peringkat
- Lab 1Dokumen5 halamanLab 1werwerwerBelum ada peringkat
- Spatio-Temporal Interpolation using gstatDokumen16 halamanSpatio-Temporal Interpolation using gstatwerwerwerBelum ada peringkat
- Crime Forecasting On A Shoestring Budget - Crime Mapping & Analysis Newscrime Mapping & Analysis NewsDokumen14 halamanCrime Forecasting On A Shoestring Budget - Crime Mapping & Analysis Newscrime Mapping & Analysis NewswerwerwerBelum ada peringkat
- Stockton 2Dokumen11 halamanStockton 2werwerwerBelum ada peringkat
- Gs Short ExDokumen135 halamanGs Short ExwerwerwerBelum ada peringkat
- STAT 544.01 - Topics - Spatial StatisticsDokumen4 halamanSTAT 544.01 - Topics - Spatial StatisticswerwerwerBelum ada peringkat
- R FAQ - How Can I Calculate Moran's I in RDokumen2 halamanR FAQ - How Can I Calculate Moran's I in RwerwerwerBelum ada peringkat
- Getting Started With Spatstat: What Kind of Data Does Spatstat Handle?Dokumen9 halamanGetting Started With Spatstat: What Kind of Data Does Spatstat Handle?werwerwerBelum ada peringkat
- Crime Forecasting On A Shoestring Budget - Crime Mapping & Analysis Newscrime Mapping & Analysis NewsDokumen14 halamanCrime Forecasting On A Shoestring Budget - Crime Mapping & Analysis Newscrime Mapping & Analysis NewswerwerwerBelum ada peringkat
- Boosting Approach To Machine LearnDokumen23 halamanBoosting Approach To Machine LearnbookreadermanBelum ada peringkat
- Comp598 Submission 99Dokumen8 halamanComp598 Submission 99werwerwerBelum ada peringkat
- Georg LM IntroDokumen10 halamanGeorg LM IntrowerwerwerBelum ada peringkat
- 07Dokumen38 halaman07werwerwerBelum ada peringkat
- Gstat PDFDokumen17 halamanGstat PDFwerwerwerBelum ada peringkat
- HW 2Dokumen4 halamanHW 2werwerwerBelum ada peringkat
- F 09 MaDokumen11 halamanF 09 MawerwerwerBelum ada peringkat