Anda mungkin juga menyukai
- DavonDokumen1.601 halamanDavonPalyyBelum ada peringkat
- DmuXfU4SEeiBcwquuD4ZzA Quiz1 AssignmentDokumen6 halamanDmuXfU4SEeiBcwquuD4ZzA Quiz1 AssignmentJoshikaBelum ada peringkat
- CAL-ST-070!17!01 Rev01 Shipping Saddles CalculationDokumen11 halamanCAL-ST-070!17!01 Rev01 Shipping Saddles CalculationgiubelloBelum ada peringkat
- VijayrDokumen75 halamanVijayrManoj SyBelum ada peringkat
- Materi Pelatihan ArduinoDokumen42 halamanMateri Pelatihan ArduinoTaufiqur Rohman0% (1)
- Design With Microprocessors: Year 3 CS Academic Year 2018/2019 1 Semester Lecturer: Radu D ĂnescuDokumen23 halamanDesign With Microprocessors: Year 3 CS Academic Year 2018/2019 1 Semester Lecturer: Radu D ĂnescuAdrian BorcaBelum ada peringkat
- Manual ArduinoDokumen15 halamanManual ArduinoBalachandraBelum ada peringkat
- Arduino ExamplesDokumen16 halamanArduino ExamplesKapila WijayaratneBelum ada peringkat
- Arduino Workshoop LoeDokumen8 halamanArduino Workshoop Loetalha.k.rajpootBelum ada peringkat
- Hands 0N With Robotics ComponentsDokumen54 halamanHands 0N With Robotics ComponentsSaksham JainBelum ada peringkat
- Tugas Mikrokontroler Dan Mikroprosesor Bobi Ardiansyah 145060301111055Dokumen7 halamanTugas Mikrokontroler Dan Mikroprosesor Bobi Ardiansyah 145060301111055Rosihan Arby HarahapBelum ada peringkat
- Fis Alm Q&aDokumen8 halamanFis Alm Q&apsekhar08240Belum ada peringkat
- 4 Arduino ProgrammingDokumen32 halaman4 Arduino Programmingncqphuong.20it2Belum ada peringkat
- Programming With Arduino: Course URL: Uggy/homeDokumen74 halamanProgramming With Arduino: Course URL: Uggy/homeAstha AggarwalBelum ada peringkat
- Lab 1Dokumen9 halamanLab 1Malik YousafBelum ada peringkat
- Programming With ArduinoDokumen74 halamanProgramming With ArduinoGURSIMRAN SINGHBelum ada peringkat
- Arduino LectureDokumen52 halamanArduino LectureSỹ RonBelum ada peringkat
- IoT Workshop Handout ProgramsDokumen7 halamanIoT Workshop Handout ProgramsMayur ShetBelum ada peringkat
- Csed LabDokumen83 halamanCsed LabÈshâñ ÇháddâBelum ada peringkat
- Intro To The Arduino: Topics: The Arduino Digital IO Analog IO Serial CommunicationDokumen33 halamanIntro To The Arduino: Topics: The Arduino Digital IO Analog IO Serial CommunicationPrince GoenkaBelum ada peringkat
- Adc ProgramsDokumen5 halamanAdc Programsamareshgunda1404Belum ada peringkat
- Arduino For BeginnersDokumen29 halamanArduino For BeginnersDavid HayaBelum ada peringkat
- Arduino MetronomeDokumen8 halamanArduino MetronomeGil VelascoBelum ada peringkat
- Connect Three Leds With Arduino and Blink Them in A Sequence and RepeatDokumen13 halamanConnect Three Leds With Arduino and Blink Them in A Sequence and RepeatPadya Akhil Sai Vamsi NayakBelum ada peringkat
- Chapter 7 and 8Dokumen12 halamanChapter 7 and 8Amruta AvhaleBelum ada peringkat
- Proiecte ArduinoDokumen46 halamanProiecte ArduinoSyad AlyBelum ada peringkat
- 5 Unit5 Arduino Interrupt, Timer and CommunicationDokumen19 halaman5 Unit5 Arduino Interrupt, Timer and Communicationpatilamrutak2003Belum ada peringkat
- Code:: Circuit #1: Blinking An LEDDokumen14 halamanCode:: Circuit #1: Blinking An LEDAbbas HashimBelum ada peringkat
- IoT Lab 2Dokumen15 halamanIoT Lab 2Arshad KhanBelum ada peringkat
- Experiment 20: infrared remote control: 1、Infrared receiving head introductionDokumen8 halamanExperiment 20: infrared remote control: 1、Infrared receiving head introductionSahbi Marrouchi100% (1)
- Assignment 01 Objective: Blinking 2 LED in A Time IntervalDokumen20 halamanAssignment 01 Objective: Blinking 2 LED in A Time IntervalSaurabh ChoudharyBelum ada peringkat
- All Sensor CodeDokumen12 halamanAll Sensor CodeEnchantressBelum ada peringkat
- MP 2,3,4Dokumen5 halamanMP 2,3,4tj millarBelum ada peringkat
- 7 Review and Sensor in ArduinoDokumen55 halaman7 Review and Sensor in ArduinoAhmadBelum ada peringkat
- All CodesDokumen28 halamanAll CodeskarrarBelum ada peringkat
- Arduino Einfuehrung SchulzeDaniel SS2010Dokumen28 halamanArduino Einfuehrung SchulzeDaniel SS2010Fernando MoreiraBelum ada peringkat
- Interface Digital and Analog I/O Devices (Arduino Interfacing)Dokumen29 halamanInterface Digital and Analog I/O Devices (Arduino Interfacing)Raggy TannaBelum ada peringkat
- Fis Lab ExamDokumen17 halamanFis Lab Exambalajirayli1203Belum ada peringkat
- ARDUINO Tinkercad Practices - NoDokumen116 halamanARDUINO Tinkercad Practices - NoDavidBelum ada peringkat
- Function and SyntexDokumen8 halamanFunction and SyntexSifatBelum ada peringkat
- IOT AssignmentDokumen8 halamanIOT Assignment09Samrat Bikram ShahBelum ada peringkat
- Arduino: Introduction & Programming: Course InstructorDokumen29 halamanArduino: Introduction & Programming: Course InstructorHuma Qayyum MohyudDin100% (1)
- Ultrasonic and LED CodeDokumen3 halamanUltrasonic and LED CodeGroove GamingBelum ada peringkat
- 05 Arduino Sensors, Motors and External InterruptsDokumen20 halaman05 Arduino Sensors, Motors and External InterruptsMalik Adil Farooq100% (2)
- FundamentalsDokumen89 halamanFundamentalsDurga Prasad100% (1)
- Introduction To ArduinoDokumen22 halamanIntroduction To ArduinoSourabh BanerjeeBelum ada peringkat
- Master of Computer Application: 2nd Year, Semester-3Dokumen8 halamanMaster of Computer Application: 2nd Year, Semester-309Samrat Bikram ShahBelum ada peringkat
- Arduino ExampleDokumen25 halamanArduino ExampleUYeMin HtikeBelum ada peringkat
- TP Arduino N2Dokumen106 halamanTP Arduino N2Hiba TouneBelum ada peringkat
- Millis For ArduinoDokumen13 halamanMillis For Arduinogsvijay57100% (1)
- IOT Lab ExpDokumen10 halamanIOT Lab Expsri kanthBelum ada peringkat
- Arduino Lab2Dokumen89 halamanArduino Lab2sarvodayasingh100% (1)
- Esp32 For Iot ApplicationsDokumen35 halamanEsp32 For Iot ApplicationsDivyesh DehuryBelum ada peringkat
- Learning ManualDokumen11 halamanLearning ManualFelipe CisnerosBelum ada peringkat
- Kecepatan SuaraDokumen3 halamanKecepatan SuaraLulu Aeria 22Belum ada peringkat
- Wa0002.Dokumen74 halamanWa0002.akvakarthik2005Belum ada peringkat
- Aim:-Led Interfacing With Arduino Uno: Experiment:-1Dokumen37 halamanAim:-Led Interfacing With Arduino Uno: Experiment:-1Nikhil MaheswariBelum ada peringkat
- Tech ME007 PDFDokumen12 halamanTech ME007 PDFfredniels100% (2)
- Iot 2Dokumen10 halamanIot 2Shruti PatelBelum ada peringkat
- Indian Institute of Technology KharagpurDokumen14 halamanIndian Institute of Technology KharagpurNitin MauryaBelum ada peringkat
- Exploring Arduino: Tools and Techniques for Engineering WizardryDari EverandExploring Arduino: Tools and Techniques for Engineering WizardryPenilaian: 4.5 dari 5 bintang4.5/5 (5)
- Biogas Presentation PDFDokumen44 halamanBiogas Presentation PDFAli Aamir100% (1)
- Apple Value ChainDokumen3 halamanApple Value ChainKeng Keat Lim100% (2)
- PreponlineDokumen8 halamanPreponlineGeeth SagarBelum ada peringkat
- Example Pump CalcsDokumen4 halamanExample Pump CalcsSourav ChattopadhyayBelum ada peringkat
- d1 - Evaluation - Justify Content Designs and Formats - FinalDokumen5 halamand1 - Evaluation - Justify Content Designs and Formats - Finalapi-466034593Belum ada peringkat
- Casting: Definition, Types, Steps Involved in Casting, Advantages, Disadvantages, Importance (PDF)Dokumen7 halamanCasting: Definition, Types, Steps Involved in Casting, Advantages, Disadvantages, Importance (PDF)Munem ShahriarBelum ada peringkat
- Doka Large Formwork User ManualDokumen21 halamanDoka Large Formwork User ManualNasir AryaniBelum ada peringkat
- Layanan Dan Pelayanan Perpustakaan: Menjawab Tantangan Era Teknologi InformasiDokumen6 halamanLayanan Dan Pelayanan Perpustakaan: Menjawab Tantangan Era Teknologi InformasiLailatur RahmiBelum ada peringkat
- Cp5151 Advanced Data Structures and AlgorithimsDokumen3 halamanCp5151 Advanced Data Structures and AlgorithimsPragaDarshBelum ada peringkat
- Waste To Energy: A Possibility For Puerto Rico, 5-2007Dokumen57 halamanWaste To Energy: A Possibility For Puerto Rico, 5-2007Detlef LoyBelum ada peringkat
- Block PlanDokumen1 halamanBlock PlanJade Atkinson PhellaineBelum ada peringkat
- Lab 11.4.1: Using The Scandisk and Defrag Utilities: Estimated Time: 30 Minutes ObjectiveDokumen2 halamanLab 11.4.1: Using The Scandisk and Defrag Utilities: Estimated Time: 30 Minutes ObjectiveHamzaSpahijaBelum ada peringkat
- Lect-6 - Economics of Chemical PlantsDokumen36 halamanLect-6 - Economics of Chemical Plantsmaged1998Belum ada peringkat
- Mine Survey CertificationDokumen37 halamanMine Survey CertificationAgustin Eliasta Ginting100% (1)
- ARM926EJ-S System CoreWare Product BriefDokumen2 halamanARM926EJ-S System CoreWare Product Briefmakumba1972Belum ada peringkat
- Jovan Marjanovic Theory of Gravity MachinesDokumen10 halamanJovan Marjanovic Theory of Gravity MachinesWilhelm HartmanBelum ada peringkat
- Assessment of Rotational Capacity Test Procedure FINALDokumen21 halamanAssessment of Rotational Capacity Test Procedure FINALzaheerahmed77Belum ada peringkat
- Free Manual Solution PDF PDFDokumen19 halamanFree Manual Solution PDF PDFSon Le Minh50% (2)
- Krunker ModMenuDokumen10 halamanKrunker ModMenuCody Kartavya0% (1)
- Manual de Parts ES16D6Dokumen36 halamanManual de Parts ES16D6Eduardo CortezBelum ada peringkat
- LogcatDokumen3.139 halamanLogcatvatsavai swathiBelum ada peringkat
- MAWS301 Datasheet B210396EN-C LowResDokumen2 halamanMAWS301 Datasheet B210396EN-C LowResmumapaduriiiBelum ada peringkat
- Voice Recognition Using MatlabDokumen10 halamanVoice Recognition Using MatlabSneha Muralidharan100% (1)
- A2 Accu-Flo Clamped Metal Pump: Engineering Operation MaintenanceDokumen28 halamanA2 Accu-Flo Clamped Metal Pump: Engineering Operation MaintenanceThanh Nghị BùiBelum ada peringkat
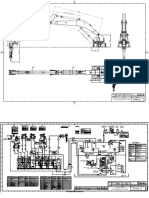
- CPP Schematic Diagram Duplex Complete 9 Jan 2019Dokumen1 halamanCPP Schematic Diagram Duplex Complete 9 Jan 2019BdSulianoBelum ada peringkat
- ASTM D445-Viscoz Cinematica PDFDokumen9 halamanASTM D445-Viscoz Cinematica PDFCorina StanculescuBelum ada peringkat
- Boiler Safety ProgramDokumen8 halamanBoiler Safety ProgramHussain KhanBelum ada peringkat
- Garrita National High SchoolDokumen5 halamanGarrita National High SchoolAxle Rose CastroBelum ada peringkat