Anda mungkin juga menyukai
- PlayStation 2 Architecture: Architecture of Consoles: A Practical Analysis, #12Dari EverandPlayStation 2 Architecture: Architecture of Consoles: A Practical Analysis, #12Belum ada peringkat
- Io BusesDokumen56 halamanIo Buseslalokew375Belum ada peringkat
- Lovely Professional University Home Work: #1 Course Code: CSE102 Course Title: Exposure To Computer Disciplines School: LITCADokumen4 halamanLovely Professional University Home Work: #1 Course Code: CSE102 Course Title: Exposure To Computer Disciplines School: LITCAGagandeepAartiyaBelum ada peringkat
- I/O Interfaces and I/O BussesDokumen31 halamanI/O Interfaces and I/O Bussesah chongBelum ada peringkat
- What Is A Bus? A Bus Is:: Slow Vehicle That Many People Ride Together A Bunch of Wires..Dokumen8 halamanWhat Is A Bus? A Bus Is:: Slow Vehicle That Many People Ride Together A Bunch of Wires..rajes_87Belum ada peringkat
- Computer Architecture and OrganizationDokumen49 halamanComputer Architecture and OrganizationMooni KhanBelum ada peringkat
- IO Management-1Dokumen12 halamanIO Management-1Leslie QwerBelum ada peringkat
- AnswersDokumen10 halamanAnswersSello HlabeliBelum ada peringkat
- Computer Architecture & Organization UNIT 1Dokumen17 halamanComputer Architecture & Organization UNIT 1Nihal GuptaBelum ada peringkat
- The University of Zambia in Conjuction With Zambia Ict CollegeDokumen12 halamanThe University of Zambia in Conjuction With Zambia Ict CollegeMartine Mpandamwike Jr.Belum ada peringkat
- Operating System Requirements: ProtectionDokumen4 halamanOperating System Requirements: ProtectionNarender KumarBelum ada peringkat
- Ucla Cs111 Operating Systems (Spring 2003, Section 1) Device ManagementDokumen6 halamanUcla Cs111 Operating Systems (Spring 2003, Section 1) Device ManagementsamsaBelum ada peringkat
- Computing Platforms: Design Methodology. Consumer Electronics Architectures. System-Level Performance and Power AnalysisDokumen38 halamanComputing Platforms: Design Methodology. Consumer Electronics Architectures. System-Level Performance and Power AnalysisLordwin MichealBelum ada peringkat
- Input-Output Basic (Simplified) I/O ArchitectureDokumen3 halamanInput-Output Basic (Simplified) I/O ArchitecturexbabaxBelum ada peringkat
- Bus StructureDokumen160 halamanBus StructureRohit SaxenaBelum ada peringkat
- Introduction To 8085Dokumen139 halamanIntroduction To 8085eldho k josephBelum ada peringkat
- Processor Design 5Z032: Interfacing Processors and PeripheralsDokumen11 halamanProcessor Design 5Z032: Interfacing Processors and PeripheralsBeencute BeencuteBelum ada peringkat
- BusesDokumen19 halamanBusesprasath67Belum ada peringkat
- 4 PDFDokumen40 halaman4 PDFjeeturathiaBelum ada peringkat
- Cpu I o Cpu CpuDokumen11 halamanCpu I o Cpu CpuRamya PrabaBelum ada peringkat
- Paper - History of Different Buses in A PCDokumen21 halamanPaper - History of Different Buses in A PCammad ahmadBelum ada peringkat
- Computer Organization: Course OverviewDokumen30 halamanComputer Organization: Course OverviewjayBelum ada peringkat
- Chapter5 Bus (Akif)Dokumen5 halamanChapter5 Bus (Akif)fayzee945150Belum ada peringkat
- Leicester University Department of Engineering MicroprocessorsDokumen6 halamanLeicester University Department of Engineering Microprocessorsdivine serpent100% (1)
- Computer ArchitectureDokumen14 halamanComputer ArchitectureMartine Mpandamwike Jr.Belum ada peringkat
- Fixdisk Detail ConceptsDokumen8 halamanFixdisk Detail ConceptsGaurang V LakhaniBelum ada peringkat
- cs1104 1Dokumen45 halamancs1104 1Narvada KhedunBelum ada peringkat
- Chapter 5: Bus SystemDokumen5 halamanChapter 5: Bus Systemfayzee945150Belum ada peringkat
- Paper - History of Different Buses in A PCDokumen20 halamanPaper - History of Different Buses in A PCammad ahmadBelum ada peringkat
- Storage BasicsDokumen71 halamanStorage BasicsImran100% (1)
- Unit 1Dokumen22 halamanUnit 1bhaivarun65Belum ada peringkat
- CS111 Introduction To Computation: Navpreet SinghDokumen46 halamanCS111 Introduction To Computation: Navpreet SinghRadheshyam GawariBelum ada peringkat
- Operating System NotesDokumen29 halamanOperating System NotesUtkarshBelum ada peringkat
- Computer System Overview: David DugganDokumen32 halamanComputer System Overview: David DugganThesisRequirementBelum ada peringkat
- DMADokumen5 halamanDMAPrabir K DasBelum ada peringkat
- Comp 2 RevisionDokumen7 halamanComp 2 Revisionapi-252367652Belum ada peringkat
- BCS-011 Computer Basics and PC Software Solved Assignment 2017Dokumen17 halamanBCS-011 Computer Basics and PC Software Solved Assignment 2017Sumit RanjanBelum ada peringkat
- Ch02 - System InterconnectionDokumen29 halamanCh02 - System InterconnectionViet Quang VoBelum ada peringkat
- Interfacing Processors and Peripherals: CS151B/EE M116C Computer Systems ArchitectureDokumen31 halamanInterfacing Processors and Peripherals: CS151B/EE M116C Computer Systems ArchitecturetinhtrilacBelum ada peringkat
- Lecture#06 - Inner Workings of The CPUDokumen80 halamanLecture#06 - Inner Workings of The CPUchaturakaBelum ada peringkat
- Bus StructureDokumen160 halamanBus Structurexperiac100% (2)
- OS FinalDokumen33 halamanOS FinalSunshineBelum ada peringkat
- Unit-III: Memory: TopicsDokumen54 halamanUnit-III: Memory: TopicsZain Shoaib MohammadBelum ada peringkat
- Computer Hardware Components: CPU, Memory, and I/O: What Is The Typical Configuration of A Computer Sold Today?Dokumen31 halamanComputer Hardware Components: CPU, Memory, and I/O: What Is The Typical Configuration of A Computer Sold Today?Abhishek SainiBelum ada peringkat
- Lecture 3 On Chapter 3 A Top-Level View of Computer Function and Interconnection by Sameer AkramDokumen37 halamanLecture 3 On Chapter 3 A Top-Level View of Computer Function and Interconnection by Sameer AkramUs ManBelum ada peringkat
- Fall 22-23 COA Lecture-1 Microcomputer SystemsDokumen29 halamanFall 22-23 COA Lecture-1 Microcomputer SystemsFaysal Ahmed SarkarBelum ada peringkat
- Today: I/O Systems!: Shared by Multiple Devices. A Device Port Typically Consisting of 4 RegistersDokumen14 halamanToday: I/O Systems!: Shared by Multiple Devices. A Device Port Typically Consisting of 4 RegistersBình NguyênBelum ada peringkat
- Bus and Memory TransfersDokumen11 halamanBus and Memory TransfersSam-eer Neo-paneyBelum ada peringkat
- Microprocessor Chapter 1Dokumen73 halamanMicroprocessor Chapter 1Wann FarieraBelum ada peringkat
- Bus StructureDokumen34 halamanBus StructureNoorullah ShariffBelum ada peringkat
- Chapter 7 Input/Output and Storeage SystemsDokumen37 halamanChapter 7 Input/Output and Storeage SystemsGreen ChiquitaBelum ada peringkat
- Computer System OverviewDokumen52 halamanComputer System OverviewAnitha JosephBelum ada peringkat
- Standard I/O Interfances Reference: Call Hamacher, "Computer Organization"Dokumen10 halamanStandard I/O Interfances Reference: Call Hamacher, "Computer Organization"JochumBelum ada peringkat
- Dav Institute of Engineering & Technology, JalandharDokumen14 halamanDav Institute of Engineering & Technology, JalandharKaran GuptaBelum ada peringkat
- CHM SolvedDokumen24 halamanCHM SolvedHod IfBelum ada peringkat
- CH 10 UNIXDokumen48 halamanCH 10 UNIXAnusha BikkineniBelum ada peringkat
- 06 Memori InternalDokumen78 halaman06 Memori InternalPGss Iqbal Karya SentanaBelum ada peringkat
- Bus StructureDokumen43 halamanBus StructureManish JangidBelum ada peringkat
- Top Level View of Computer Function and InterconnectionDokumen62 halamanTop Level View of Computer Function and InterconnectionAhsan JameelBelum ada peringkat
- Knowledge Creation and Knowledge ArchitectureDokumen27 halamanKnowledge Creation and Knowledge ArchitecturepadmaBelum ada peringkat
- BusDokumen82 halamanBuspadmaBelum ada peringkat
- CIS775: Computer Architecture: Chapter 1: Fundamentals of Computer DesignDokumen43 halamanCIS775: Computer Architecture: Chapter 1: Fundamentals of Computer DesignpadmaBelum ada peringkat
- Design ThinkingDokumen1 halamanDesign ThinkingpadmaBelum ada peringkat
- (Autonomous) ,: User Interface DesignDokumen3 halaman(Autonomous) ,: User Interface DesignpadmaBelum ada peringkat
- Sem-I PSP:: Ii YearDokumen13 halamanSem-I PSP:: Ii YearpadmaBelum ada peringkat
- Cs2405 Computer Graphics Laboratory L T P C 0 0 3 2Dokumen1 halamanCs2405 Computer Graphics Laboratory L T P C 0 0 3 2padmaBelum ada peringkat
- Evaluation of Fruit Ripeness Using Electronic Nose: This Paper Describes The Use of AnDokumen34 halamanEvaluation of Fruit Ripeness Using Electronic Nose: This Paper Describes The Use of AnpadmaBelum ada peringkat
- Nandha Educational Institutions, Erode: Morning SnacksDokumen4 halamanNandha Educational Institutions, Erode: Morning SnackspadmaBelum ada peringkat
- Retest IIIDokumen1 halamanRetest IIIpadmaBelum ada peringkat
- T & C Fastener Co, LTD.: Certified Material Test ReportDokumen1 halamanT & C Fastener Co, LTD.: Certified Material Test Reportlady romeroBelum ada peringkat
- Nguyenvanthinh BKC13107 N01Dokumen35 halamanNguyenvanthinh BKC13107 N01Văn thinh NguyenBelum ada peringkat
- FLT 93 Themal Flow TransmiterDokumen8 halamanFLT 93 Themal Flow TransmiterSALAM ALIBelum ada peringkat
- Leser at A GlanceDokumen12 halamanLeser at A Glanceธวัชชัย ขวัญเรียนBelum ada peringkat
- JBT Exp-310 Brochure 0313cDokumen2 halamanJBT Exp-310 Brochure 0313cCiprian OprescuBelum ada peringkat
- Hydronic 300 Valve Setting Instructions - M04002enDokumen14 halamanHydronic 300 Valve Setting Instructions - M04002enbdgnsBelum ada peringkat
- Commutation Circuits SCR PDFDokumen2 halamanCommutation Circuits SCR PDFRhondaBelum ada peringkat
- Checklist For FormworkDokumen1 halamanChecklist For Formworkmojeed bolajiBelum ada peringkat
- Warning Chime System: SectionDokumen63 halamanWarning Chime System: SectionChang ChangBelum ada peringkat
- Collibra Prescriptive Path v2Dokumen4 halamanCollibra Prescriptive Path v2AhamedSharifBelum ada peringkat
- Priti Kadam Dte ProjectDokumen15 halamanPriti Kadam Dte ProjectAk MarathiBelum ada peringkat
- Valuation: Philippine Residential Broadband MarketDokumen5 halamanValuation: Philippine Residential Broadband MarketNico Angeles MenesesBelum ada peringkat
- 7) Progress PaymentDokumen5 halaman7) Progress Paymentkerwin jayBelum ada peringkat
- gddr6 Sgram 8gb BriefDokumen22 halamangddr6 Sgram 8gb BriefВладимир ИльиновBelum ada peringkat
- Passive Optical Network of Company ECIDokumen39 halamanPassive Optical Network of Company ECIKundan VanamaBelum ada peringkat
- Kawasaki Bajaj CT 125 Operating ManualDokumen48 halamanKawasaki Bajaj CT 125 Operating ManualRoger MifaBelum ada peringkat
- Antec 1200 ManualDokumen11 halamanAntec 1200 ManualmhtradeBelum ada peringkat
- Students Industrial Work Experience ScheDokumen16 halamanStudents Industrial Work Experience Schejoseph emmanuelBelum ada peringkat
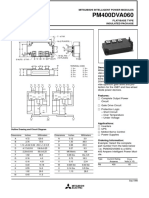
- PM400DVA060: Mitsubishi Intelligent Power ModulesDokumen6 halamanPM400DVA060: Mitsubishi Intelligent Power ModulesDiego GrisalesBelum ada peringkat
- Denon Home Theater Sys 5 1 Avr x500Dokumen2 halamanDenon Home Theater Sys 5 1 Avr x500D_D_76Belum ada peringkat
- Online CommunicationDokumen14 halamanOnline CommunicationClarin FleminBelum ada peringkat
- Reference Manual (0.8.0) (2022.04.16) : OpencoreDokumen111 halamanReference Manual (0.8.0) (2022.04.16) : OpencorevalakiakinemtevagyBelum ada peringkat
- Chapter 7 E Business SystemsDokumen35 halamanChapter 7 E Business Systemsarif213002Belum ada peringkat
- 336e PDFDokumen25 halaman336e PDFMohamed Harb100% (1)
- OptiX RTN 980 Product IntroductionDokumen24 halamanOptiX RTN 980 Product IntroductionRafael LessaBelum ada peringkat
- Note: Posted Transactions Until The Last Working Day Are ShownDokumen10 halamanNote: Posted Transactions Until The Last Working Day Are Shownsheikh usmanBelum ada peringkat
- ZTE ZXSDR R8882 Product DescriptionDokumen23 halamanZTE ZXSDR R8882 Product Descriptionrdmiguel_198360% (1)
- Apachehvac: Training Notes - Part 1Dokumen31 halamanApachehvac: Training Notes - Part 1joe1256100% (1)
- Aircraft Electrical Systems-OVDokumen38 halamanAircraft Electrical Systems-OVbhargav_eede100% (1)