Anda mungkin juga menyukai
- Modelo de Acta Constitutiva de Sociedad Anonima de Capital VariableDokumen8 halamanModelo de Acta Constitutiva de Sociedad Anonima de Capital Variablearazelii6994% (52)
- Tutorial Mastercam X5Dokumen60 halamanTutorial Mastercam X5Daniel Alejandro Gomez75% (4)
- Calculo de ReservasDokumen2 halamanCalculo de ReservasMARIABelum ada peringkat
- Apple y Facebook Lideres Por Naturaleza.1Dokumen9 halamanApple y Facebook Lideres Por Naturaleza.1Alexander Montoya0% (1)
- Problemas Resueltos de CuadripolosDokumen18 halamanProblemas Resueltos de CuadripolosJose Fabrich67% (3)
- El misterio de Quetzalcóatl: orígenes y significados de la deidad mesoamericanaDokumen38 halamanEl misterio de Quetzalcóatl: orígenes y significados de la deidad mesoamericanaJuan Villicaña DapénzxuBelum ada peringkat
- Teoría Computación Examen ElementosDokumen5 halamanTeoría Computación Examen ElementosCarlos Mila100% (1)
- Cultura Tehotihuacana PDFDokumen50 halamanCultura Tehotihuacana PDFPEDROBelum ada peringkat
- 05 - Sistemas de Mixtos-Ultima PDFDokumen42 halaman05 - Sistemas de Mixtos-Ultima PDFCarlos GarciaBelum ada peringkat
- Datos Practica 1Dokumen2 halamanDatos Practica 1Carlos GarciaBelum ada peringkat
- 07 - BG Causalidad en Bond GraphsDokumen27 halaman07 - BG Causalidad en Bond GraphsCarlos GarciaBelum ada peringkat
- FotosdelMaiz R1 Rev PDFDokumen72 halamanFotosdelMaiz R1 Rev PDFCarlos GarciaBelum ada peringkat
- Apuntes de Calculo VariacionalDokumen691 halamanApuntes de Calculo VariacionalmiscaelBelum ada peringkat
- 01-BG Modelado EstructuralDokumen39 halaman01-BG Modelado EstructuralCarlos GarciaBelum ada peringkat
- 01-BG Modelado EstructuralDokumen39 halaman01-BG Modelado EstructuralCarlos GarciaBelum ada peringkat
- Teoria Control AutomaticoDokumen382 halamanTeoria Control Automaticomorita1985Belum ada peringkat
- MetodologíaeliasprotesisDokumen1 halamanMetodologíaeliasprotesisCarlos GarciaBelum ada peringkat
- Especificaciones de ProyectoDokumen2 halamanEspecificaciones de ProyectoCarlos GarciaBelum ada peringkat
- 392930172Dokumen8 halaman392930172Carlos GarciaBelum ada peringkat
- Guia Práctica de Sensores Antonio Serna RuizDokumen205 halamanGuia Práctica de Sensores Antonio Serna RuizAlex Velarde38% (8)
- CuadripoloDokumen26 halamanCuadripoloEduardo GarcíaBelum ada peringkat
- Solucionario de Dennis G Zill - Ecuaciones DiferencialesDokumen87 halamanSolucionario de Dennis G Zill - Ecuaciones DiferencialespredictivoturbinasBelum ada peringkat
- Imr-Pr-01 Procedimiento de Roceria o Cor de Maleza%252c Descapote y PodaDokumen6 halamanImr-Pr-01 Procedimiento de Roceria o Cor de Maleza%252c Descapote y PodaTatiana PachecoBelum ada peringkat
- Marketing Digital para El Posicionamiento de Restaurantes de Comida SaludableDokumen1 halamanMarketing Digital para El Posicionamiento de Restaurantes de Comida Saludablekirari21Belum ada peringkat
- Trabajo Viernes 15 SistemasDokumen5 halamanTrabajo Viernes 15 SistemasJhõršhîtö ÄÏönêBelum ada peringkat
- Kali LinuxDokumen3 halamanKali LinuxArnold Casas CamargoBelum ada peringkat
- Diseño y Nuevas Tendencias EstructuralesDokumen2 halamanDiseño y Nuevas Tendencias EstructuralesLibrado Jimenez Perez100% (1)
- Redes SocialesDokumen9 halamanRedes Socialesfernanda corzoBelum ada peringkat
- Documento PolinomiosDokumen2 halamanDocumento Polinomiosandrimar monteroBelum ada peringkat
- Tipos de Procesador Según La Cantidad de Núcleos o Procesadores CoreDokumen9 halamanTipos de Procesador Según La Cantidad de Núcleos o Procesadores CoreKevinho The Urban PowerBelum ada peringkat
- 07-Colecta de Datos-Manual de Instrucciones Estación Total TOPCON GPT 2006Dokumen22 halaman07-Colecta de Datos-Manual de Instrucciones Estación Total TOPCON GPT 2006Juan PabloBelum ada peringkat
- Análisis de BoussinesqDokumen12 halamanAnálisis de BoussinesqMiguelngelBelum ada peringkat
- Ciclo de vida de un proyecto: fases y etapasDokumen1 halamanCiclo de vida de un proyecto: fases y etapasluzBelum ada peringkat
- Guía de Diseño de OSPF - Cisco SystemsDokumen69 halamanGuía de Diseño de OSPF - Cisco SystemsJøNåthån NavaBelum ada peringkat
- UA1-Programacion MultiprocesoDokumen45 halamanUA1-Programacion MultiprocesoRocio Gomez CaroBelum ada peringkat
- 2.1.1 Pca . - Elaboracion y Presentacion de Documentos y ArchivosDokumen8 halaman2.1.1 Pca . - Elaboracion y Presentacion de Documentos y ArchivosCristina Arias DuránBelum ada peringkat
- Ejercicios Propuestos - Fase 3 - Programación y PruebasDokumen9 halamanEjercicios Propuestos - Fase 3 - Programación y PruebasReneBelum ada peringkat
- Save Remote Desktop Connection Settings To RDP File in WindowsDokumen12 halamanSave Remote Desktop Connection Settings To RDP File in Windowsjoseto_441Belum ada peringkat
- Tema Propiedades de Los LimitesDokumen20 halamanTema Propiedades de Los LimitesRigo LopezBelum ada peringkat
- Encoder Hc-020K - Blog de PatagoniaTec ElectronicaDokumen4 halamanEncoder Hc-020K - Blog de PatagoniaTec Electronicamicha2mcBelum ada peringkat
- Escuela CuantitativaDokumen5 halamanEscuela CuantitativaMirian Huaman ConzaBelum ada peringkat
- Historia de La Matematica y Sus DerivadosDokumen3 halamanHistoria de La Matematica y Sus DerivadosMartin AjpBelum ada peringkat
- Laminas CiscooDokumen27 halamanLaminas CiscooMauricio ArevaloBelum ada peringkat
- Topicos Avanzados de Bases de DatosDokumen14 halamanTopicos Avanzados de Bases de DatosVale Quiróz ChávezBelum ada peringkat
- Basic Programming XRCDokumen156 halamanBasic Programming XRCJohan Zraghoz100% (1)
- Gestión ProyectosDokumen6 halamanGestión ProyectosFelix Martin GutierrezBelum ada peringkat
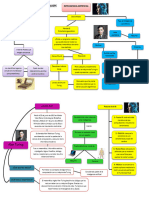
- Mapa Mental TuringDokumen2 halamanMapa Mental Turingإدوارد خافييرBelum ada peringkat