Anda mungkin juga menyukai
- Neural Networks For Machine Learning: Lecture 3a Learning The Weights of A Linear NeuronDokumen34 halamanNeural Networks For Machine Learning: Lecture 3a Learning The Weights of A Linear NeuronReshma KhemchandaniBelum ada peringkat
- Neural Networks For Machine Learning: Lecture 3a Learning The Weights of A Linear NeuronDokumen41 halamanNeural Networks For Machine Learning: Lecture 3a Learning The Weights of A Linear NeuronMohamed MostafaBelum ada peringkat
- UNIT II: Perceptron: Output SumDokumen12 halamanUNIT II: Perceptron: Output SumSarmi HarshaBelum ada peringkat
- Learning With Linear Neurons: Adapted From Lectures by Geoffrey Hinton and Others Updated by N. Intrator, May 2007Dokumen59 halamanLearning With Linear Neurons: Adapted From Lectures by Geoffrey Hinton and Others Updated by N. Intrator, May 2007Mohammad Al SamhouriBelum ada peringkat
- L3 BackpropagationDokumen61 halamanL3 BackpropagationAlimohd AslamBelum ada peringkat
- 5 AnnDokumen103 halaman5 AnnZaeem AbbasBelum ada peringkat
- Perceptron Lecture 3Dokumen25 halamanPerceptron Lecture 3amjad tamishBelum ada peringkat
- Neural Networks For Machine LearningDokumen47 halamanNeural Networks For Machine LearningMohammad AlzyoudBelum ada peringkat
- Lecture 4 - 2007 - Backpropagation - (HINTON)Dokumen60 halamanLecture 4 - 2007 - Backpropagation - (HINTON)alan1966Belum ada peringkat
- Chapter 07 Artificial Neural NetworkDokumen62 halamanChapter 07 Artificial Neural NetworkRijesh ShresthaBelum ada peringkat
- ML Lecture#4Dokumen109 halamanML Lecture#4muhammadhzrizwan2002Belum ada peringkat
- Neural Network: Sudipta RoyDokumen25 halamanNeural Network: Sudipta RoymanBelum ada peringkat
- Shallow Neural NetworkDokumen152 halamanShallow Neural NetworkSreetam GangulyBelum ada peringkat
- Lecture 7 Loss Function and RegularizationDokumen38 halamanLecture 7 Loss Function and RegularizationUtkarsh BhalodeBelum ada peringkat
- Introduction To Neural Networks: John Paxton Montana State University Summer 2003Dokumen31 halamanIntroduction To Neural Networks: John Paxton Montana State University Summer 2003Muhanad Al-khalisyBelum ada peringkat
- Unit - I Artificial Neural NetworksDokumen23 halamanUnit - I Artificial Neural NetworksMary MorseBelum ada peringkat
- Nns Are A Study of Parallel and Distributed Processing Systems (PDPS)Dokumen46 halamanNns Are A Study of Parallel and Distributed Processing Systems (PDPS)harutyunBelum ada peringkat
- A Matrix Formulation of The Multiple Regression ModelDokumen5 halamanA Matrix Formulation of The Multiple Regression ModelaliBelum ada peringkat
- Lecture 2a An Overview of The Main Types of Neural Network ArchitectureDokumen32 halamanLecture 2a An Overview of The Main Types of Neural Network ArchitectureMohamed MostafaBelum ada peringkat
- Hebbian Learning and Gradient Descent Learning: Neural Computation: Lecture 5Dokumen20 halamanHebbian Learning and Gradient Descent Learning: Neural Computation: Lecture 5richaBelum ada peringkat
- Recurrent Neural NetworkDokumen81 halamanRecurrent Neural NetworkRivujit DasBelum ada peringkat
- NN 2Dokumen42 halamanNN 2Ku LotBelum ada peringkat
- Neural NetworksDokumen42 halamanNeural NetworksTharun RaajBelum ada peringkat
- Chapter 5 Artificial Neural NetworksDokumen50 halamanChapter 5 Artificial Neural NetworksKenneth Kibet NgenoBelum ada peringkat
- Learning TechniquesDokumen11 halamanLearning TechniquesLingesh K VBelum ada peringkat
- L2 Perceptrons, Function Approximation, ClassificationDokumen89 halamanL2 Perceptrons, Function Approximation, ClassificationUzair SiddiquiBelum ada peringkat
- Perceptron Linear ClassifiersDokumen42 halamanPerceptron Linear ClassifiersHimanshu SaxenaBelum ada peringkat
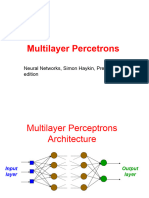
- Multi Layer Perceptron HaykinDokumen50 halamanMulti Layer Perceptron HaykinAFFIFA JAHAN ANONNABelum ada peringkat
- Neural Networks - An Introduction: Slide 1Dokumen51 halamanNeural Networks - An Introduction: Slide 1ManlBelum ada peringkat
- ANN Learning ProcessDokumen25 halamanANN Learning ProcessAnurag RautBelum ada peringkat
- Recurrent Neural NetworkDokumen81 halamanRecurrent Neural NetworkSreetam GangulyBelum ada peringkat
- Pattern Classifiers1Dokumen46 halamanPattern Classifiers1MercyBelum ada peringkat
- ErrorDokumen24 halamanErrornourhan fahmyBelum ada peringkat
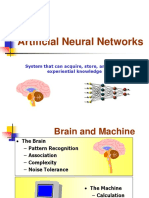
- Artificial Neural Networks: System That Can Acquire, Store, and Utilize Experiential KnowledgeDokumen43 halamanArtificial Neural Networks: System That Can Acquire, Store, and Utilize Experiential KnowledgeUtkarsh AgarwalBelum ada peringkat
- CS423 Data Warehousing and Data Mining: Dr. Hammad AfzalDokumen67 halamanCS423 Data Warehousing and Data Mining: Dr. Hammad AfzalZafar IqbalBelum ada peringkat
- Training of Weights: Artificial Neural NetworksDokumen12 halamanTraining of Weights: Artificial Neural NetworkstaliqaBelum ada peringkat
- Simple Neural Nets For Pattern ClassificationDokumen68 halamanSimple Neural Nets For Pattern ClassificationsukruthBelum ada peringkat
- Simple Neural Nets For Pattern ClassificationDokumen68 halamanSimple Neural Nets For Pattern ClassificationsukruthBelum ada peringkat
- Automatic Generation Control Using Artificial Neural Networks - HarkiratDokumen47 halamanAutomatic Generation Control Using Artificial Neural Networks - Harkiratmalini72Belum ada peringkat
- Single Layer Feedforward NetworksDokumen21 halamanSingle Layer Feedforward NetworksAKSHIT MATHUR 15BEC0582Belum ada peringkat
- 2024 MTH058 Lecture02 BackpropagationDokumen62 halaman2024 MTH058 Lecture02 BackpropagationMark MysteryBelum ada peringkat
- Architectures of Artificial Neural Networks: Deepak D, Asst. Prof., Dept. of CSE, Canara Engg. College 1Dokumen61 halamanArchitectures of Artificial Neural Networks: Deepak D, Asst. Prof., Dept. of CSE, Canara Engg. College 1Smriti SharmaBelum ada peringkat
- Artificial Neural NetworksDokumen31 halamanArtificial Neural NetworksSandra Martínez CastroBelum ada peringkat
- Lecture Three Multi-Layer Perceptron: Backpropagation: Part I: Fundamentals of Neural NetworksDokumen70 halamanLecture Three Multi-Layer Perceptron: Backpropagation: Part I: Fundamentals of Neural NetworksWantong LiaoBelum ada peringkat
- AI - Physics Informed Neural Network by ARNAB HALDERDokumen15 halamanAI - Physics Informed Neural Network by ARNAB HALDERARNAB HALDERBelum ada peringkat
- Neural Networks For Machine Learning: Lecture 9a Overview of Ways To Improve GeneralizationDokumen39 halamanNeural Networks For Machine Learning: Lecture 9a Overview of Ways To Improve GeneralizationMarius_2010Belum ada peringkat
- Soft Computing 4Dokumen23 halamanSoft Computing 4shivangiimishraa1819Belum ada peringkat
- L02 - 03 Crash Course On NNDokumen112 halamanL02 - 03 Crash Course On NNPaulo SantosBelum ada peringkat
- Back Propagation in NNDokumen30 halamanBack Propagation in NNShubhamBelum ada peringkat
- cs224n 2023 Lecture03 NeuralnetsDokumen83 halamancs224n 2023 Lecture03 Neuralnetsmyturtle game01Belum ada peringkat
- Lec19 DeltaDokumen19 halamanLec19 DeltaChrisber SalvadorBelum ada peringkat
- Neural Networks For Machine Learning: Lecture 6a Overview of Mini - Batch Gradient DescentDokumen31 halamanNeural Networks For Machine Learning: Lecture 6a Overview of Mini - Batch Gradient DescentMario PeñaBelum ada peringkat
- Unit 2Dokumen112 halamanUnit 2LOGESH WARAN PBelum ada peringkat
- Neural Networks For Machine Learning: Lecture 9a Overview of Ways To Improve GeneralizationDokumen39 halamanNeural Networks For Machine Learning: Lecture 9a Overview of Ways To Improve GeneralizationMohammad AlzyoudBelum ada peringkat
- Lecture3 - Linear ClassifiersDokumen16 halamanLecture3 - Linear ClassifiersPacket MancerBelum ada peringkat
- Week 06 Lecture MaterialDokumen46 halamanWeek 06 Lecture MaterialMeer HassanBelum ada peringkat
- Introduction To Neural Networks: John Paxton Montana State University Summer 2003Dokumen24 halamanIntroduction To Neural Networks: John Paxton Montana State University Summer 2003tarasimadhu545Belum ada peringkat
- Highly Interconnected Processing Elements: 1. Neural Network ArchitecturesDokumen7 halamanHighly Interconnected Processing Elements: 1. Neural Network ArchitecturesMD AJMALBelum ada peringkat
- Lecture 6Dokumen33 halamanLecture 6Madhav SharmaBelum ada peringkat
- Lecture 4Dokumen34 halamanLecture 4Madhav SharmaBelum ada peringkat
- Lecture 3Dokumen54 halamanLecture 3Madhav SharmaBelum ada peringkat
- Lecture 5Dokumen31 halamanLecture 5Madhav SharmaBelum ada peringkat
- SFA Paper - G E BATTESE & T J COELLI - Frontier Production Funtion (Paddy Farmers in India)Dokumen17 halamanSFA Paper - G E BATTESE & T J COELLI - Frontier Production Funtion (Paddy Farmers in India)Madhav SharmaBelum ada peringkat
- Tutorial 5 - Questions and AnswersDokumen4 halamanTutorial 5 - Questions and AnswersMadhav SharmaBelum ada peringkat
- Tutorial 4 - Questions and AnswersDokumen5 halamanTutorial 4 - Questions and AnswersMadhav SharmaBelum ada peringkat
- ABT PaperDokumen6 halamanABT PaperMadhav SharmaBelum ada peringkat
- Chapter 9 Fundamental of Hypothesis TestingDokumen27 halamanChapter 9 Fundamental of Hypothesis TestingMadhav SharmaBelum ada peringkat
- Report 11: Evidence of Initial Success For China Exiting COVID-19 Social Distancing Policy After Achieving ContainmentDokumen8 halamanReport 11: Evidence of Initial Success For China Exiting COVID-19 Social Distancing Policy After Achieving ContainmentMadhav SharmaBelum ada peringkat
- Solar Geometry 2003 CompatibleDokumen41 halamanSolar Geometry 2003 CompatibleMadhav SharmaBelum ada peringkat
- Tutorial 2 - Questions and AnswersDokumen3 halamanTutorial 2 - Questions and AnswersMadhav SharmaBelum ada peringkat
- Energies 05 03425Dokumen6 halamanEnergies 05 03425Madhav SharmaBelum ada peringkat
- Restarting Dabhol: Who Will Bear The Cost? and Why?Dokumen8 halamanRestarting Dabhol: Who Will Bear The Cost? and Why?Madhav SharmaBelum ada peringkat
- Prayas Enron ControversyDokumen67 halamanPrayas Enron ControversyMadhav SharmaBelum ada peringkat
- SQL MCQ'sDokumen63 halamanSQL MCQ'sMadhav Sharma100% (1)
- Banking SystemDokumen6 halamanBanking SystemMadhav Sharma100% (2)
- Matlab Imp FilesDokumen44 halamanMatlab Imp FilesMadhav SharmaBelum ada peringkat
- Hotel Management MySql CaseStudyDokumen3 halamanHotel Management MySql CaseStudyMadhav SharmaBelum ada peringkat
- 6th Central Pay Commission Salary CalculatorDokumen15 halaman6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- Ies-2014 Answers:: Electrical Engineering Paper-IDokumen1 halamanIes-2014 Answers:: Electrical Engineering Paper-IMadhav SharmaBelum ada peringkat
- Skills Assessment Guidelines For ApplicantsDokumen20 halamanSkills Assessment Guidelines For Applicantsatulverma22Belum ada peringkat
- Central Processing Unit: From Wikipedia, The Free EncyclopediaDokumen18 halamanCentral Processing Unit: From Wikipedia, The Free EncyclopediaJoe joBelum ada peringkat
- FortiOS-6 2 0-CookbookDokumen1.326 halamanFortiOS-6 2 0-CookbookFredy Giovanni Suarez SuarezBelum ada peringkat
- 135 To 150 Mcqs Word Best McqsDokumen3 halaman135 To 150 Mcqs Word Best McqsSaadBelum ada peringkat
- Lyapunov Stability AnalysisDokumen17 halamanLyapunov Stability AnalysisumeshgangwarBelum ada peringkat
- Phaneendra Sai Mareedu: Employment DetailsDokumen1 halamanPhaneendra Sai Mareedu: Employment DetailsPHANEENDRA SAIBelum ada peringkat
- Cover LetterDokumen2 halamanCover Letterpechan07Belum ada peringkat
- Btrieve Record Manager Error CodesDokumen22 halamanBtrieve Record Manager Error CodesAlejandro Azálgara NeiraBelum ada peringkat
- Cellular Communications (DCS U-6)Dokumen22 halamanCellular Communications (DCS U-6)Mukesh100% (2)
- Formula Notes Signals and SystemsDokumen23 halamanFormula Notes Signals and SystemsimmadiuttejBelum ada peringkat
- SAP Gioia Tauro Terminal ProblemDokumen26 halamanSAP Gioia Tauro Terminal Problemapi-3750011Belum ada peringkat
- Data Mining in Education Data Classification and Decision Tree Approach 097 Z00080E10038 2Dokumen5 halamanData Mining in Education Data Classification and Decision Tree Approach 097 Z00080E10038 2dewi patmaBelum ada peringkat
- Honeycomb 3d PrintingDokumen12 halamanHoneycomb 3d PrintingNAVEEN SWAMIBelum ada peringkat
- Ujian 1 1718 Sem 1Dokumen2 halamanUjian 1 1718 Sem 1Muhammad Haziq TaqiuddinBelum ada peringkat
- Template ProgrammingDokumen80 halamanTemplate ProgrammingAswani MucharlaBelum ada peringkat
- Java Notes For Class IDokumen5 halamanJava Notes For Class ISudipti TiwariBelum ada peringkat
- The Tetex System: Concepts of Installation, Configuration and MaintenanceDokumen10 halamanThe Tetex System: Concepts of Installation, Configuration and MaintenancealbasudBelum ada peringkat
- Access 2002 Programming by ExampleDokumen574 halamanAccess 2002 Programming by ExampletfmconsultBelum ada peringkat
- Disassembly Guide For DP6600 v1.0Dokumen34 halamanDisassembly Guide For DP6600 v1.0Jose HernandezBelum ada peringkat
- NoSQL Data Management1Dokumen32 halamanNoSQL Data Management1Aitha SankarBelum ada peringkat
- Six Sigma Yellow BeltDokumen4 halamanSix Sigma Yellow Beltdwarkeh494Belum ada peringkat
- IBM DS3200 System Storage PDFDokumen144 halamanIBM DS3200 System Storage PDFelbaronrojo2008Belum ada peringkat
- Gothic 3 Cheats, Gothic 3 Walk Through - GameSpotDokumen224 halamanGothic 3 Cheats, Gothic 3 Walk Through - GameSpothanamuko_2000Belum ada peringkat
- Cisco Packet Tracer For Beginners Num 2Dokumen9 halamanCisco Packet Tracer For Beginners Num 2Scarlet Baby100% (1)
- PC Worx Function BlocksDokumen83 halamanPC Worx Function BlocksMUHAMMAD USMANBelum ada peringkat
- FC1 625Dokumen50 halamanFC1 625LOL1044Belum ada peringkat
- A Manual For Biochemistry ProtocolsDokumen7 halamanA Manual For Biochemistry ProtocolsLauryn HemmerlingBelum ada peringkat
- Design of An Efficient FIFO Buffer For Network On Chip RoutersDokumen4 halamanDesign of An Efficient FIFO Buffer For Network On Chip RoutersAmityUniversity IIcBelum ada peringkat
- Arch Build System: Home Packages Forums Bugs AUR DownloadDokumen10 halamanArch Build System: Home Packages Forums Bugs AUR DownloadmnawarBelum ada peringkat
- Introduction To Design of ExperimentsDokumen11 halamanIntroduction To Design of ExperimentsEndah SulistiaBelum ada peringkat