Anda mungkin juga menyukai
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (399)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (894)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- SSP+411+++2 8l+and+3 2L+FSI+engines+with+Audi+valvelift+systemDokumen64 halamanSSP+411+++2 8l+and+3 2L+FSI+engines+with+Audi+valvelift+systemgbeszeBelum ada peringkat
- Camshaft CatalogDokumen6 halamanCamshaft CatalogAhmedBelum ada peringkat
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- Kathak Dance BookletDokumen58 halamanKathak Dance Bookletಜಗದೀಶ್ ಎ ಎಂBelum ada peringkat
- Kathak Dance BookletDokumen58 halamanKathak Dance Bookletಜಗದೀಶ್ ಎ ಎಂBelum ada peringkat
- Komatsu TruckDokumen16 halamanKomatsu TruckLuis Ramirez100% (1)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (73)
- 120k2 Part One PDFDokumen729 halaman120k2 Part One PDFMachinery Club67% (3)
- MBE900 Nozzle Holder PDFDokumen5 halamanMBE900 Nozzle Holder PDFJosue Alvarez VegaBelum ada peringkat
- Fiat Tractor Service ManualDokumen11 halamanFiat Tractor Service ManualBlytzx Games0% (1)
- Cocoa World Production (2015/2016) : No. Country Production (1000 Ton/year)Dokumen80 halamanCocoa World Production (2015/2016) : No. Country Production (1000 Ton/year)AvinashRaiBelum ada peringkat
- Calibration Chart49Dokumen104 halamanCalibration Chart49Sudeep Kumar80% (15)
- Machine Design Ball Screw Vol 1 e BookDokumen22 halamanMachine Design Ball Screw Vol 1 e Bookविशाल पुडासैनीBelum ada peringkat
- Machine Design Ball Screw Vol 1 e BookDokumen22 halamanMachine Design Ball Screw Vol 1 e Bookविशाल पुडासैनीBelum ada peringkat
- Workshopmanual Anf125 5 III Astrea Supra 2005 en Supplement 10022019 1111 San CompressedDokumen87 halamanWorkshopmanual Anf125 5 III Astrea Supra 2005 en Supplement 10022019 1111 San CompressedHonolulu100% (2)
- 47597684-Case SM PDFDokumen550 halaman47597684-Case SM PDFTrupp2785100% (4)
- Buku Manual Mitsubishi Fuso: Read/DownloadDokumen2 halamanBuku Manual Mitsubishi Fuso: Read/DownloadMat SyukurBelum ada peringkat
- Sidecar of BicycleDokumen20 halamanSidecar of BicyclePankaj KumarBelum ada peringkat
- Bolted 1Dokumen47 halamanBolted 1Purna ChBelum ada peringkat
- About Fifth Wheels: If You Want To Enhance The Efficiency of Your TractorDokumen17 halamanAbout Fifth Wheels: If You Want To Enhance The Efficiency of Your TractorAvinashRaiBelum ada peringkat
- Daytona Street Triple R 675 SM 2009 ParteDokumen53 halamanDaytona Street Triple R 675 SM 2009 Partegc7090100% (2)
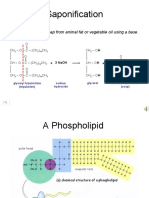
- Saponification: Process of Making Soap From Animal Fat or Vegetable Oil Using A BaseDokumen14 halamanSaponification: Process of Making Soap From Animal Fat or Vegetable Oil Using A BaseAvinashRaiBelum ada peringkat
- Design and Analysis of Independent Suspension System Using FEADokumen7 halamanDesign and Analysis of Independent Suspension System Using FEAAvinashRaiBelum ada peringkat
- 48 WordNet Tulu ShivakumarDokumen7 halaman48 WordNet Tulu ShivakumarAvinashRaiBelum ada peringkat
- Spring Wind UpDokumen8 halamanSpring Wind UpAvinashRaiBelum ada peringkat
- Lateral Dynamics of Multiaxle Vehicles: Johannes StoerkleDokumen87 halamanLateral Dynamics of Multiaxle Vehicles: Johannes StoerkleAvinashRaiBelum ada peringkat
- 13 DigestionDokumen21 halaman13 Digestionapi-270511270Belum ada peringkat
- CasshewDokumen11 halamanCasshewAvinashRaiBelum ada peringkat
- FatigueDokumen10 halamanFatigueAvinashRaiBelum ada peringkat
- Lateral Dynamics of Multiaxle Vehicles: Johannes StoerkleDokumen87 halamanLateral Dynamics of Multiaxle Vehicles: Johannes StoerkleAvinashRaiBelum ada peringkat
- NoodleDokumen52 halamanNoodleAvinashRaiBelum ada peringkat
- Yoga Is UsedDokumen42 halamanYoga Is UsedAvinashRaiBelum ada peringkat
- BharatanatyamDokumen4 halamanBharatanatyamAvinashRaiBelum ada peringkat
- Customer ID Why Did You Purchase Hotstar Premium?Dokumen4 halamanCustomer ID Why Did You Purchase Hotstar Premium?AvinashRaiBelum ada peringkat
- Is 210Dokumen16 halamanIs 210Debopriyo GhoshBelum ada peringkat
- Design and Failure Modes of Automotive Suspension SpringsDokumen20 halamanDesign and Failure Modes of Automotive Suspension SpringsheliselyayBelum ada peringkat
- Dynamic Systems and Control: Associate Professor, Department of Engineering DesignDokumen1 halamanDynamic Systems and Control: Associate Professor, Department of Engineering DesignAvinashRaiBelum ada peringkat
- Vibration Study of A Vehicle Suspension Assembly WDokumen13 halamanVibration Study of A Vehicle Suspension Assembly WAvinashRaiBelum ada peringkat
- AJSE December2009 Lowres PDFDokumen14 halamanAJSE December2009 Lowres PDFAvinashRaiBelum ada peringkat
- FG IronDokumen23 halamanFG IronAvinashRaiBelum ada peringkat
- Disclosure To Promote The Right To InformationDokumen25 halamanDisclosure To Promote The Right To InformationmggogsBelum ada peringkat
- Absolute vs Relative Error - Calculating Approximation PrecisionDokumen1 halamanAbsolute vs Relative Error - Calculating Approximation PrecisionAvinashRaiBelum ada peringkat
- Three Wheeled Vehicle Eprintsrvr IIScDokumen30 halamanThree Wheeled Vehicle Eprintsrvr IIScSunilkumar ReddyBelum ada peringkat
- Adams SolverDokumen138 halamanAdams Solveravegliante9314Belum ada peringkat
- Trunk - Left Side - Rear SAM Module (N10/2) : W211fuses - Ods 06/18/2019 01:12:03Dokumen2 halamanTrunk - Left Side - Rear SAM Module (N10/2) : W211fuses - Ods 06/18/2019 01:12:03Mario KirilovBelum ada peringkat
- 404C-22G ElectropaK (PN1664 75th)Dokumen2 halaman404C-22G ElectropaK (PN1664 75th)marianusBelum ada peringkat
- 07 GRP02 All EnginesDokumen64 halaman07 GRP02 All Engineseurospeed2Belum ada peringkat
- JCB Tracked Robot Loaders 190T1110TDokumen6 halamanJCB Tracked Robot Loaders 190T1110TFajrin M. NatsirBelum ada peringkat
- Quadro Di Comando Omnilink Omnilink Control PanelDokumen7 halamanQuadro Di Comando Omnilink Omnilink Control PanelAlbertoBelum ada peringkat
- E - Jet ChecklistDokumen1 halamanE - Jet Checklisttallie.tyeBelum ada peringkat
- Preve Executive ADokumen12 halamanPreve Executive AFmv 24Belum ada peringkat
- Hym SP My13 enDokumen200 halamanHym SP My13 enYuri FabresBelum ada peringkat
- Golf 5 DijagnostikaDokumen8 halamanGolf 5 DijagnostikaMagoc OsBelum ada peringkat
- Sae j848 2018 King Pin Servicio PesadoDokumen2 halamanSae j848 2018 King Pin Servicio PesadoCristian GordilloBelum ada peringkat
- Telligent Brake System Differential Slip Control (DSR)Dokumen23 halamanTelligent Brake System Differential Slip Control (DSR)Sameh MohamedBelum ada peringkat
- Manual Skoda Octavia - Gearbox m5 002Dokumen94 halamanManual Skoda Octavia - Gearbox m5 002Cornea Horatiu Sebastian100% (1)
- Design Shaft Driven BicycleDokumen3 halamanDesign Shaft Driven BicycleretechBelum ada peringkat
- The CrossheadDokumen2 halamanThe CrossheadKarim Sowley DelgadoBelum ada peringkat
- Component Locator - Master Electrical Component ListDokumen2 halamanComponent Locator - Master Electrical Component ListAlfonso BarrantesBelum ada peringkat
- HT 8675 TDokumen76 halamanHT 8675 TDaniel Cáceres TrujilloBelum ada peringkat
- Utes Flat Decks and Gullwing Boxes PDFDokumen6 halamanUtes Flat Decks and Gullwing Boxes PDFReikoMoriBelum ada peringkat
- Standby Power Prime Power: Standard FeaturesDokumen4 halamanStandby Power Prime Power: Standard FeaturesMagicneering PredictBelum ada peringkat