Anda mungkin juga menyukai
- Puem R1Dokumen158 halamanPuem R1Yael Nepo100% (7)
- Arqueología EspacialDokumen2 halamanArqueología EspacialYenny Carreño100% (1)
- Artículo Estimadorde TorqueDokumen12 halamanArtículo Estimadorde TorqueJohnyAlexanderPerezBelum ada peringkat
- SemiconductoresDokumen6 halamanSemiconductoresSgor KronosBelum ada peringkat
- Origen de La FotografíaDokumen12 halamanOrigen de La FotografíaEterna SpectrumBelum ada peringkat
- Alimentador de PecesDokumen6 halamanAlimentador de PecesCristian Pizarro Vasquez50% (2)
- Accesorios de Tuberias para Industria Alimentaria 1Dokumen8 halamanAccesorios de Tuberias para Industria Alimentaria 1Keity Anais Zuloeta ValdiviezoBelum ada peringkat
- Unidad Didactica de Educación Fisica Nivel Primario 3Dokumen5 halamanUnidad Didactica de Educación Fisica Nivel Primario 3Carlos Manuel Peña AyosaBelum ada peringkat
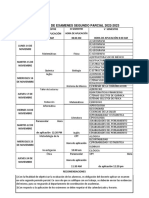
- Segundo Parcial 2022-2023Dokumen1 halamanSegundo Parcial 2022-2023Megan KeithBelum ada peringkat
- Analisis de Respuesta TransitoriaDokumen9 halamanAnalisis de Respuesta TransitoriaJesús Castrillón ValenciaBelum ada peringkat
- @@@-Quimica-1-Bachillerato-Simon-Plan Anual PDFDokumen25 halaman@@@-Quimica-1-Bachillerato-Simon-Plan Anual PDFrami pinanBelum ada peringkat
- Practica-4-Transistor-BJT-Curvas-Caracteristicas AsiendoDokumen8 halamanPractica-4-Transistor-BJT-Curvas-Caracteristicas AsiendoVale AndradeBelum ada peringkat
- Identificacion de Lineas ElectricasDokumen36 halamanIdentificacion de Lineas Electricascesarflores365Belum ada peringkat
- Tarea 2 Calculo Integral UNADDokumen7 halamanTarea 2 Calculo Integral UNADArlinson Sanabria100% (1)
- Tipos de Sensores ABS Velocidad de Rueda - Blog Técnico Automotriz PDFDokumen10 halamanTipos de Sensores ABS Velocidad de Rueda - Blog Técnico Automotriz PDFYdelkadiasmela DominguezmorelBelum ada peringkat
- Números ImaginariosDokumen15 halamanNúmeros ImaginariosGIIO CRUGOBelum ada peringkat
- Training Monitores y TV LCD BenqDokumen58 halamanTraining Monitores y TV LCD BenqvideosonBelum ada peringkat
- Actividad Unidad 3 FisicaDokumen4 halamanActividad Unidad 3 Fisicayorkis sanmartin50% (2)
- Tratado de ApologeticaDokumen46 halamanTratado de ApologeticaOmar RCBelum ada peringkat
- Algoritmo de HomlergDokumen15 halamanAlgoritmo de Homlergwilfredo ccoscco pumaBelum ada peringkat
- Dialnet PotenciaEstadisticaYCalculoDelTamanoDelEfectoEnGPo 4945415 PDFDokumen15 halamanDialnet PotenciaEstadisticaYCalculoDelTamanoDelEfectoEnGPo 4945415 PDFAlisont Mella OlaveBelum ada peringkat
- INFORME N 3-Ley de CharlesDokumen9 halamanINFORME N 3-Ley de CharlesJafetSoriaPaimaBelum ada peringkat
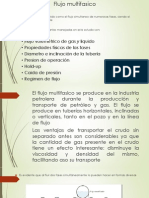
- Flujo MultifasicoDokumen31 halamanFlujo MultifasicoidealbchBelum ada peringkat
- EXC Termodinámica Molecular de Los Equilibrios de Fases Prausnitz DigitalDokumen711 halamanEXC Termodinámica Molecular de Los Equilibrios de Fases Prausnitz Digitalrey-gM100% (1)
- Ensayo Coca Codo SinclairDokumen5 halamanEnsayo Coca Codo SinclairFrancis CalderonBelum ada peringkat
- Cap. 4.1 Carga AxialDokumen22 halamanCap. 4.1 Carga Axialchris12756% (9)
- Seguridad de Maquinas Con Normas Internacionales Otto GoernemannDokumen78 halamanSeguridad de Maquinas Con Normas Internacionales Otto GoernemannEdwin Ramos Feo100% (1)
- Manual Mediciones Eléctricas BásicasDokumen168 halamanManual Mediciones Eléctricas BásicasAldo Ulises Vanegas88% (8)
- Curso Basico RosacruzDokumen13 halamanCurso Basico RosacruzRegina Levy67% (3)
- Actividad de La Semana 1Dokumen5 halamanActividad de La Semana 1Jamilet Galarza GalarzaBelum ada peringkat