Anda mungkin juga menyukai
- Metodos NumericosDokumen115 halamanMetodos Numericosakjshdsakjd100% (1)
- Metodo Newton Raphson (Iteraciones)Dokumen7 halamanMetodo Newton Raphson (Iteraciones)Diego VillafuerteBelum ada peringkat
- Manual MatlabDokumen58 halamanManual Matlabapi-3693527100% (4)
- Libro de Metodos NumericosDokumen158 halamanLibro de Metodos NumericosSergio AlejandroBelum ada peringkat
- Programación en MatLabDokumen96 halamanProgramación en MatLabCristian GuevaraBelum ada peringkat
- Aplicaciones de Los Metodos NumericosDokumen6 halamanAplicaciones de Los Metodos NumericosCarlos Alberto VanegasBelum ada peringkat
- 1.1 Area Bajo La CurvaDokumen10 halaman1.1 Area Bajo La CurvaRaymundo MendozaBelum ada peringkat
- Metodos Numericos Metodo de EulerDokumen6 halamanMetodos Numericos Metodo de EulerJesus Asaf Mtanous RamirezBelum ada peringkat
- Analisis Numerico PDFDokumen288 halamanAnalisis Numerico PDFVictor Gutierrez CruzBelum ada peringkat
- Algebra LinealDokumen18 halamanAlgebra LinealYonnathan Ramirez OcampoBelum ada peringkat
- Antologia de Metodos NumericosDokumen22 halamanAntologia de Metodos NumericosFrancisco Bautista Rocha100% (1)
- EcuacionesDiferenciales Contenidos PDFDokumen3 halamanEcuacionesDiferenciales Contenidos PDFCamila FuenmayorBelum ada peringkat
- AlgoritmosDokumen92 halamanAlgoritmosJorge Luis ChinchillaBelum ada peringkat
- Ecuaciones DiferencialesDokumen13 halamanEcuaciones DiferencialesJorge Luis LópezBelum ada peringkat
- Método de Volumen Finito (FVM)Dokumen5 halamanMétodo de Volumen Finito (FVM)Cindy MuñozBelum ada peringkat
- Variacion de ParametrosDokumen4 halamanVariacion de Parametrost160392Belum ada peringkat
- Producto de Ecuaciones DiferencialesDokumen10 halamanProducto de Ecuaciones DiferencialesRichard Principe GalvezBelum ada peringkat
- Estructuras Selectivas Condiciones Simples y AnidadasDokumen36 halamanEstructuras Selectivas Condiciones Simples y AnidadasアダムMineBelum ada peringkat
- Solución de Ecuaciones Diferenciales.Dokumen42 halamanSolución de Ecuaciones Diferenciales.LuisFerNandoBelum ada peringkat
- 1.2 Razones de Su AplicacionDokumen9 halaman1.2 Razones de Su AplicacionReynaCarrillo0% (2)
- Ecuación DiferencialDokumen12 halamanEcuación DiferencialJose Vasquez Vargas100% (1)
- 1 Calculo IntegralDokumen24 halaman1 Calculo IntegralHenry LazaroBelum ada peringkat
- Tesis Ingeniería Aeronáutica - ControlDokumen82 halamanTesis Ingeniería Aeronáutica - ControlCarlos GómezBelum ada peringkat
- Matemáticas Aplicadas A Las CCSS IIDokumen5 halamanMatemáticas Aplicadas A Las CCSS IIfvd71100% (1)
- Sesión 14 Integración DefinidaDokumen45 halamanSesión 14 Integración DefinidaChristopher MalcaBelum ada peringkat
- INTERPOLACIÓNDokumen12 halamanINTERPOLACIÓNSusy Diaz100% (1)
- Linealización de Modelos Matemáticos No LinealesDokumen13 halamanLinealización de Modelos Matemáticos No LinealesGloria Del AbraBelum ada peringkat
- Metodo NumericoDokumen33 halamanMetodo NumericoRuben Flores100% (1)
- DerivadasDokumen21 halamanDerivadasMax Bernardo100% (2)
- Práctica 1 Calculo IntegralDokumen3 halamanPráctica 1 Calculo IntegralDelfino OlivaresBelum ada peringkat
- Diagrama de VennDokumen23 halamanDiagrama de VennJhon SethBelum ada peringkat
- Metodos NumericosDokumen197 halamanMetodos NumericosVictor Timana SilvaBelum ada peringkat
- Método de Gauss SeidelDokumen21 halamanMétodo de Gauss SeidelDavid AguilarBelum ada peringkat
- Métodos de Los Valores Propios y Vectores PropiosDokumen11 halamanMétodos de Los Valores Propios y Vectores PropiosRobert Valladolid SullonBelum ada peringkat
- Ensayo Metodos NuméricosDokumen42 halamanEnsayo Metodos NuméricosAlfredo SánchezBelum ada peringkat
- Serie Numérica y ConvergenciaDokumen5 halamanSerie Numérica y ConvergenciaLizeth ConuBelum ada peringkat
- Apuntes de Ecuaciones DiferencialesDokumen116 halamanApuntes de Ecuaciones DiferencialesLuisFernandoRangelLópez100% (1)
- Curso Control PID PRÁCTICODokumen22 halamanCurso Control PID PRÁCTICORommel Cossio OquendoBelum ada peringkat
- Numeros ComplejosDokumen16 halamanNumeros ComplejosCarlos EafBelum ada peringkat
- 4 - Clase de Ley de Gauss - 2022Dokumen31 halaman4 - Clase de Ley de Gauss - 2022John DavilaBelum ada peringkat
- Metodos NumericosDokumen8 halamanMetodos NumericosChrystal CastleBelum ada peringkat
- Serie de TaylorDokumen33 halamanSerie de TaylorLuisa Orozco LoteroBelum ada peringkat
- Fórmula de Interpolación de Newton (Matemática V)Dokumen6 halamanFórmula de Interpolación de Newton (Matemática V)Teresa Alvarengas100% (1)
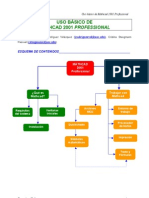
- Uso Basico de Mathcad 2001Dokumen16 halamanUso Basico de Mathcad 2001Alejandro Hernandez LopezBelum ada peringkat
- Pensamiento Computacional: Fecha Límite de Entrega: 02/11/2022Dokumen8 halamanPensamiento Computacional: Fecha Límite de Entrega: 02/11/2022piero salazar100% (1)
- Series de FourierDokumen8 halamanSeries de FourierGonzalo GrimaldiBelum ada peringkat
- Ecuacion de Poisson y LaplaceDokumen5 halamanEcuacion de Poisson y LaplacePaula Soledad Carrasco RuizBelum ada peringkat
- Ecuaciones DiferencialesDokumen6 halamanEcuaciones DiferencialesGeovanny Moisés PanchanaBelum ada peringkat
- Continuidad de FuncionesDokumen20 halamanContinuidad de FuncionesBuck Smith100% (1)
- Integración Numérica-TeoriaDokumen19 halamanIntegración Numérica-Teoria18121584Belum ada peringkat
- Taller de WxMaximaDokumen5 halamanTaller de WxMaximaNéstor Valles VillarrealBelum ada peringkat
- Valores y Vectores PropiosDokumen72 halamanValores y Vectores Propioslaureno12Belum ada peringkat
- Metodo SimplexDokumen21 halamanMetodo SimplexMariza Muro VargasBelum ada peringkat
- Integrales TriplesDokumen23 halamanIntegrales TriplesleoelectricoBelum ada peringkat
- Momento de Segundo OrdenDokumen60 halamanMomento de Segundo OrdenronaldBelum ada peringkat
- G-2 U-2 Analisis Estructural 1 Mar Santiago José Miguel 17500076 PDFDokumen25 halamanG-2 U-2 Analisis Estructural 1 Mar Santiago José Miguel 17500076 PDFJosé Miguel MarBelum ada peringkat
- Campos Vectoriales y EscalaresDokumen30 halamanCampos Vectoriales y EscalaresLucioApumaitaBelum ada peringkat
- Interpolacion Lineal deDokumen8 halamanInterpolacion Lineal deEza Chapiz HernandezBelum ada peringkat
- Aproximaciones y Errores de RedondeoDokumen4 halamanAproximaciones y Errores de RedondeoCRGHYO0% (1)
- Microsoft PowerPoint - Metodos Numericos - Errores (Modo de Compatibilidad)Dokumen27 halamanMicrosoft PowerPoint - Metodos Numericos - Errores (Modo de Compatibilidad)eder buitrago100% (1)
- 2019A MEC8D3 Clase8 29-Abril-2019Dokumen25 halaman2019A MEC8D3 Clase8 29-Abril-2019Carlos PalloBelum ada peringkat
- 2019A MEC8D3 Clase13 24-Junio-2019 PDFDokumen25 halaman2019A MEC8D3 Clase13 24-Junio-2019 PDFCarlos PalloBelum ada peringkat
- 2019A MEC8D3 Clase10 13-Mayo-2019 PDFDokumen20 halaman2019A MEC8D3 Clase10 13-Mayo-2019 PDFCarlos PalloBelum ada peringkat
- 2019A MEC8D3 Generalidades-Tolerancias PDFDokumen23 halaman2019A MEC8D3 Generalidades-Tolerancias PDFCarlos PalloBelum ada peringkat
- 2019A MEC8D3 Generalidades 2 PDFDokumen52 halaman2019A MEC8D3 Generalidades 2 PDFCarlos PalloBelum ada peringkat
- 2019A MEC8D3 Clase12 17-Junio-2019 PDFDokumen20 halaman2019A MEC8D3 Clase12 17-Junio-2019 PDFCarlos PalloBelum ada peringkat
- 2019A MEC8D3 Clase7 26-Abril-2019Dokumen14 halaman2019A MEC8D3 Clase7 26-Abril-2019Carlos PalloBelum ada peringkat
- 2019A MEC8D3 Clase2 5-Abril-2019Dokumen10 halaman2019A MEC8D3 Clase2 5-Abril-2019Carlos PalloBelum ada peringkat
- 2019A MEC8D3 Clase11 7-Junio-2019 PDFDokumen14 halaman2019A MEC8D3 Clase11 7-Junio-2019 PDFCarlos PalloBelum ada peringkat
- 2019A MEC8D3 Clase5 15-Abril-2019Dokumen12 halaman2019A MEC8D3 Clase5 15-Abril-2019Carlos PalloBelum ada peringkat
- 2019A MEC8D3 Clase6 22-Abril-2019Dokumen12 halaman2019A MEC8D3 Clase6 22-Abril-2019Carlos PalloBelum ada peringkat
- MatriceriaDokumen11 halamanMatriceriaAnonymous NpuhYT4Belum ada peringkat
- 2019A MEC8D3 Clase3 8-Abril-2019Dokumen13 halaman2019A MEC8D3 Clase3 8-Abril-2019Carlos PalloBelum ada peringkat
- 2019A MEC8D3 Clase6 22-Abril-2019Dokumen12 halaman2019A MEC8D3 Clase6 22-Abril-2019Carlos PalloBelum ada peringkat
- 2019A MEC8D3 Clase6 22-Abril-2019Dokumen12 halaman2019A MEC8D3 Clase6 22-Abril-2019Carlos PalloBelum ada peringkat
- Gestion Calidad - 2018 B - Prueba 01 - CorreccionDokumen5 halamanGestion Calidad - 2018 B - Prueba 01 - CorreccionCarlos PalloBelum ada peringkat
- 2019A - MEC6B5 - Clase31 32 - 18 24 Junio 2019Dokumen21 halaman2019A - MEC6B5 - Clase31 32 - 18 24 Junio 2019Carlos PalloBelum ada peringkat
- 2019A MEC6B5 Clase30-1 17-Junio-2019Dokumen6 halaman2019A MEC6B5 Clase30-1 17-Junio-2019Carlos PalloBelum ada peringkat
- MatriceriaDokumen11 halamanMatriceriaAnonymous NpuhYT4Belum ada peringkat
- 2019A MEC6B5 Clase29-1 13-Junio-2019Dokumen10 halaman2019A MEC6B5 Clase29-1 13-Junio-2019Carlos PalloBelum ada peringkat
- 2019A MEC6B5 Clase28 11-Junio-2019Dokumen9 halaman2019A MEC6B5 Clase28 11-Junio-2019Carlos PalloBelum ada peringkat
- Gira UMCODokumen2 halamanGira UMCOCarlos PalloBelum ada peringkat
- Informe Ventilador Axial Turbomaquina EPNDokumen11 halamanInforme Ventilador Axial Turbomaquina EPNAriel Garzón RubioBelum ada peringkat
- Formato Plan de ClaseDokumen1 halamanFormato Plan de ClaseCarlos PalloBelum ada peringkat
- Clase 1Dokumen42 halamanClase 1Edgar BorjaBelum ada peringkat
- Cuaderno Mecanica IIDokumen65 halamanCuaderno Mecanica IICarlos PalloBelum ada peringkat
- Diseño de Un Mecanismo Rehabilitador de ManoDokumen2 halamanDiseño de Un Mecanismo Rehabilitador de ManoCarlos PalloBelum ada peringkat
- Informe 1 FluidosDokumen9 halamanInforme 1 FluidosCarlos PalloBelum ada peringkat
- 08 IntegraciónNumérica 2014 Solo MATLABDokumen12 halaman08 IntegraciónNumérica 2014 Solo MATLABJose Paucara Villca0% (1)
- Silabo Metodos Numericos 2015 IIDokumen5 halamanSilabo Metodos Numericos 2015 IILuceroMilagrosCubaMirandaBelum ada peringkat
- Cálculo. Trabajo!Dokumen12 halamanCálculo. Trabajo!Génesis HernándezBelum ada peringkat
- Mat241 2014 1Dokumen4 halamanMat241 2014 1Renzo Rios Roque0% (1)
- Integración NuméricaDokumen16 halamanIntegración NuméricaAlexandra ParreñoBelum ada peringkat
- Taller Integracion NumericaDokumen1 halamanTaller Integracion NumericaROBERTO ARREGOCESBelum ada peringkat
- Metodo Del TrapecioDokumen24 halamanMetodo Del TrapecioCarlos Arias AarónBelum ada peringkat
- (Met. Num) Exposicion 13 - Formulas de Integración de Newton-CotesDokumen25 halaman(Met. Num) Exposicion 13 - Formulas de Integración de Newton-CotesEdwin LoberaBelum ada peringkat
- Solucionario Hoja de Taller #3Dokumen10 halamanSolucionario Hoja de Taller #3Brenda Moreno Barrantes75% (4)
- Practica Derivacion e Integracion NumericaDokumen26 halamanPractica Derivacion e Integracion NumericaCristian Omer20% (5)
- Cómo Hacer Un Trineo de GUIA DE SIERRADokumen9 halamanCómo Hacer Un Trineo de GUIA DE SIERRAjpintomwh100% (1)
- Guia Integración Numérica PDFDokumen9 halamanGuia Integración Numérica PDFAlvaro Espinosa PerezBelum ada peringkat
- Examen Final Metodos Numericos 2021-1 - Revisión Del IntentoDokumen19 halamanExamen Final Metodos Numericos 2021-1 - Revisión Del IntentoJorg Meza ParionaBelum ada peringkat
- Trabajo de Investigación Calculo II (Integracón Numérica) PDFDokumen3 halamanTrabajo de Investigación Calculo II (Integracón Numérica) PDFKevin AritaBelum ada peringkat
- Taller Analisis NumericoDokumen11 halamanTaller Analisis NumericoB. DiazBelum ada peringkat
- Tarea 3 - Maria Teresa Jaramillo MonDokumen7 halamanTarea 3 - Maria Teresa Jaramillo MoncristiBelum ada peringkat
- Análisis Numérico, Las Matemáticas Del Cálculo Científico - Kincaid1 PDFDokumen366 halamanAnálisis Numérico, Las Matemáticas Del Cálculo Científico - Kincaid1 PDFAlejandra Parra57% (7)
- Notas de Clase de Dinamica EstructuralDokumen171 halamanNotas de Clase de Dinamica Estructuralpele123100% (6)
- Cuadratura e Integracion Numerica Un SegDokumen224 halamanCuadratura e Integracion Numerica Un SegJulio Martin Rojas TenazoaBelum ada peringkat
- Engargolado 3Dokumen45 halamanEngargolado 3Viry GomezBelum ada peringkat
- Manu2 U3 A2 ArnaDokumen7 halamanManu2 U3 A2 ArnaArturo NavaBelum ada peringkat
- SCNJDokumen4 halamanSCNJSrsBelum ada peringkat
- Cálculo y Análisis - en OctaveDokumen14 halamanCálculo y Análisis - en OctaveAvenamar Méndez RodríguezBelum ada peringkat
- Técnicas de Simulación Por Computadoras - JGRDokumen3 halamanTécnicas de Simulación Por Computadoras - JGRJosé GermánBelum ada peringkat
- 23 - Tarea No.3Dokumen23 halaman23 - Tarea No.3Kevin AlfonsoBelum ada peringkat
- PROGRAMACIONDokumen22 halamanPROGRAMACIONEsmeralda GuerreroBelum ada peringkat
- Manu2 U3 Ea ArnaDokumen15 halamanManu2 U3 Ea ArnaArturo NavaBelum ada peringkat
- Cargas Impulsivas PDFDokumen36 halamanCargas Impulsivas PDFMax FloresBelum ada peringkat
- Clase Práctica Tema 5 Integrales en MatlabDokumen3 halamanClase Práctica Tema 5 Integrales en MatlabedwardBelum ada peringkat
- Silabo Métodos Numéricos Mb536C DDokumen6 halamanSilabo Métodos Numéricos Mb536C DAnthony Kenneth ApazaBelum ada peringkat