Anda mungkin juga menyukai
- BaikpulihDokumen10 halamanBaikpulihSyaa MalyqaBelum ada peringkat
- DT 1Dokumen2 halamanDT 1aftab20Belum ada peringkat
- PWRDokumen18 halamanPWRSyaa MalyqaBelum ada peringkat
- Fiber Optic System DesignDokumen21 halamanFiber Optic System DesignSyaa MalyqaBelum ada peringkat
- Pembezaan 2Dokumen86 halamanPembezaan 2Syaa MalyqaBelum ada peringkat
- Plotting Drawing: BDA 10102 Computer Aided DesignDokumen7 halamanPlotting Drawing: BDA 10102 Computer Aided DesignSyaa MalyqaBelum ada peringkat
- Basic Electromagnet1Dokumen73 halamanBasic Electromagnet1FadzlanFathullahBelum ada peringkat
- Nota Pembezaan 1Dokumen38 halamanNota Pembezaan 1Syaa MalyqaBelum ada peringkat
- Summarizing DataDokumen30 halamanSummarizing DataSyaa MalyqaBelum ada peringkat
- PatentDokumen26 halamanPatentSyaa MalyqaBelum ada peringkat
- Pembezaan - Latih Tubi 2 PDFDokumen5 halamanPembezaan - Latih Tubi 2 PDFSyaa MalyqaBelum ada peringkat
- Create 2D Basic DrawingDokumen26 halamanCreate 2D Basic DrawingSyaa MalyqaBelum ada peringkat
- PROJEKDokumen10 halamanPROJEKSyaa MalyqaBelum ada peringkat
- Ergonomic PDFDokumen7 halamanErgonomic PDFSyaa MalyqaBelum ada peringkat
- PrototypeDokumen5 halamanPrototypeSyaa MalyqaBelum ada peringkat
- Brainstorming and 6 HatsDokumen15 halamanBrainstorming and 6 HatsSyaa MalyqaBelum ada peringkat
- Chapter 3 Engineering MaterialDokumen62 halamanChapter 3 Engineering MaterialSyaa MalyqaBelum ada peringkat
- July 18 and 23 - 9AM To 3PM: University Tun Hussein Onn MalaysiaDokumen1 halamanJuly 18 and 23 - 9AM To 3PM: University Tun Hussein Onn MalaysiaSyaa MalyqaBelum ada peringkat
- 5.4 Complex NumbersDokumen14 halaman5.4 Complex NumbersSyed Raheel AdeelBelum ada peringkat
- NSTP Industrial Training Report Provides Insights into Electrical WorkDokumen31 halamanNSTP Industrial Training Report Provides Insights into Electrical WorkSyaa Malyqa100% (3)
- Brainstorming and 6 HatsDokumen15 halamanBrainstorming and 6 HatsSyaa MalyqaBelum ada peringkat
- Resistor fundamentals and calculationsDokumen14 halamanResistor fundamentals and calculationshafizeijaBelum ada peringkat
- Using The New Bloom's Taxonomy To Design Meaningful Learning Assessments Kevin Smythe & Jane HalonenDokumen3 halamanUsing The New Bloom's Taxonomy To Design Meaningful Learning Assessments Kevin Smythe & Jane HalonenSyaa MalyqaBelum ada peringkat
- The Assure ModelDokumen3 halamanThe Assure ModelMuhammad Khazin Asyaranie Razali0% (1)
- BloomDokumen2 halamanBloomSyaa MalyqaBelum ada peringkat
- Ec Nego Skills2Dokumen43 halamanEc Nego Skills2Syaa MalyqaBelum ada peringkat
- Ec2 Intro To Comm4Dokumen58 halamanEc2 Intro To Comm4Tikar MengkuangBelum ada peringkat
- Innovationprocessmodels 130108022247 Phpapp02Dokumen37 halamanInnovationprocessmodels 130108022247 Phpapp02Dhaval PatelBelum ada peringkat
- Using The New Bloom's Taxonomy To Design Meaningful Learning Assessments Kevin Smythe & Jane HalonenDokumen3 halamanUsing The New Bloom's Taxonomy To Design Meaningful Learning Assessments Kevin Smythe & Jane HalonenSyaa MalyqaBelum ada peringkat
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5782)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (399)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (587)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (72)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (119)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- Applications and Characteristics of Overcurrent Relays ANSI 50 51Dokumen5 halamanApplications and Characteristics of Overcurrent Relays ANSI 50 51Pierre Enrique Carrasco FuentesBelum ada peringkat
- Alternating RelayDokumen4 halamanAlternating RelayAriel DimacaliBelum ada peringkat
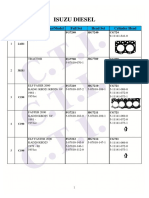
- Isuzu DieselDokumen25 halamanIsuzu DieselJulian Arcila ValenciaBelum ada peringkat
- Hybrid Battery System Diagnostic Trouble Code ChartDokumen5 halamanHybrid Battery System Diagnostic Trouble Code ChartAdamBelum ada peringkat
- Lecture4. DC Generators - 1.ppt - 0Dokumen52 halamanLecture4. DC Generators - 1.ppt - 0abd rahim bin a.samatBelum ada peringkat
- SMDC Controller: Mobile Lubrication SystemsDokumen5 halamanSMDC Controller: Mobile Lubrication SystemsDedeBelum ada peringkat
- Bosch - KE-Jet - CIS (Mitchell) PDFDokumen17 halamanBosch - KE-Jet - CIS (Mitchell) PDFMellisa TamayoBelum ada peringkat
- Simpolo Integrity Price List 20-11-018Dokumen1 halamanSimpolo Integrity Price List 20-11-018shashirajBelum ada peringkat
- Transformers Test Review QuestionsDokumen30 halamanTransformers Test Review Questionsajeet kumarBelum ada peringkat
- Project Report Physics XII TransformersDokumen12 halamanProject Report Physics XII TransformersPankaj Gill68% (77)
- Switchyard (2) PDFDokumen7 halamanSwitchyard (2) PDFmyfile_rakesh0% (1)
- Aama Samuha BhawanDokumen36 halamanAama Samuha BhawanDeepa SubediBelum ada peringkat
- E74134 Talea Touch Plus v2 Ing Sup032ar Rev04 GruppoDokumen6 halamanE74134 Talea Touch Plus v2 Ing Sup032ar Rev04 GruppoSebastian MateiBelum ada peringkat
- Self-Propelled Scissor Lifts Parts ManualDokumen67 halamanSelf-Propelled Scissor Lifts Parts ManualVüsal 1Belum ada peringkat
- Gazebo - Type BDokumen6 halamanGazebo - Type BDaniel OkereBelum ada peringkat
- Measuring Masonry WorksDokumen6 halamanMeasuring Masonry WorksKimberly Wealth Meonada MagnayeBelum ada peringkat
- Section 8 System ProtectionDokumen33 halamanSection 8 System ProtectionAhmedBelum ada peringkat
- DD15Dokumen4 halamanDD15Eduardo Sanchez100% (1)
- DOL StartersDokumen2 halamanDOL StartersAbhi TiwariBelum ada peringkat
- Basic Electrical Symbols - Common: Earth ElectrodeDokumen7 halamanBasic Electrical Symbols - Common: Earth ElectrodeJave BaylonBelum ada peringkat
- Power Supplies: Transducers AC and DC Diodes CapacitorsDokumen10 halamanPower Supplies: Transducers AC and DC Diodes CapacitorsJose C. Lita JrBelum ada peringkat
- Tan Delta Test On 6KV HT MotorDokumen6 halamanTan Delta Test On 6KV HT MotorhafezasadBelum ada peringkat
- Operating and Safety Operating and Safety Instruction Manual Instruction ManualDokumen16 halamanOperating and Safety Operating and Safety Instruction Manual Instruction Manual.100% (1)
- Vehicle-Specific Information2126496131101185535Dokumen8 halamanVehicle-Specific Information2126496131101185535Marcos MontesBelum ada peringkat
- ATR Tool As Jul23Dokumen13 halamanATR Tool As Jul23mahmoud barakatBelum ada peringkat
- Manpower DeploymentDokumen18 halamanManpower DeploymentKrm ChariBelum ada peringkat
- Thermal 1unit3Dokumen178 halamanThermal 1unit3NAGU2009Belum ada peringkat
- Simple Explanation ANSI M107 Vs M102Dokumen1 halamanSimple Explanation ANSI M107 Vs M102petertheartistBelum ada peringkat
- Of Block Cylinders and Pneumatic Swing Clamps: Magnetic Sensors For Position MonitoringDokumen2 halamanOf Block Cylinders and Pneumatic Swing Clamps: Magnetic Sensors For Position MonitoringDaniel Gutierrez JailletBelum ada peringkat
- Ar10 2Dokumen48 halamanAr10 2Amazonas ManutençãoBelum ada peringkat