Anda mungkin juga menyukai
- Discrete Element Method to Model 3D Continuous MaterialsDari EverandDiscrete Element Method to Model 3D Continuous MaterialsBelum ada peringkat
- (Engineersdaily Com) IBC2000E11Dokumen21 halaman(Engineersdaily Com) IBC2000E11Nazar ShafiqBelum ada peringkat
- Computational Fluid Dynamics, NPTEL Lecture 42 by Suman ChakraborthyDokumen31 halamanComputational Fluid Dynamics, NPTEL Lecture 42 by Suman ChakraborthyShubhankar Gurav 16210094Belum ada peringkat
- CE 809 - Lecture 1 - Formulation of Mathematical Model of SDF SystemsDokumen29 halamanCE 809 - Lecture 1 - Formulation of Mathematical Model of SDF SystemsArslan UmarBelum ada peringkat
- 07 DR. NAVEED Topic 6 Importance of Ductility in Structural Performance1Dokumen69 halaman07 DR. NAVEED Topic 6 Importance of Ductility in Structural Performance1Namrata ThapaBelum ada peringkat
- Response Spectrum Analysis As Per Indian IS: 1893 (Part 1) - 2002Dokumen15 halamanResponse Spectrum Analysis As Per Indian IS: 1893 (Part 1) - 2002Anonymous UibQYvc6Belum ada peringkat
- Application of Derivatives To Economics-sec1-PresDokumen19 halamanApplication of Derivatives To Economics-sec1-PresMuhammad Ayyaz Iftikhar100% (1)
- Section Cut in SAP2000Dokumen4 halamanSection Cut in SAP2000Ahsan SattarBelum ada peringkat
- Analysis of Structure Supported by Elastic Foundation: A Seminar OnDokumen62 halamanAnalysis of Structure Supported by Elastic Foundation: A Seminar OnHaytham AlmaghariBelum ada peringkat
- Frame Analysis: Determine Natural Periods and Design Base Shear ForcesDokumen6 halamanFrame Analysis: Determine Natural Periods and Design Base Shear Forcesnial69100% (1)
- 05-Bar Element DuzeltilmisDokumen56 halaman05-Bar Element Duzeltilmismmk111Belum ada peringkat
- Structural dynamics problems and solutionsDokumen8 halamanStructural dynamics problems and solutionsamadeus135Belum ada peringkat
- Theories of Elastic FailureDokumen6 halamanTheories of Elastic FailurePrithvi ChilukuriBelum ada peringkat
- Ce234 Technical Study On CFRP - Simbajon - RetchieDokumen15 halamanCe234 Technical Study On CFRP - Simbajon - RetchieRitch SimbajonBelum ada peringkat
- (Lecture - 2 - Updated) Dynamics of Structures Chapter 2 PDFDokumen37 halaman(Lecture - 2 - Updated) Dynamics of Structures Chapter 2 PDFMasood AhmedBelum ada peringkat
- Rebound Hammer Test Results for Wharf BeamsDokumen6 halamanRebound Hammer Test Results for Wharf BeamsShielou GuanzonBelum ada peringkat
- Introduction To Seismic Essentials in GroningenDokumen14 halamanIntroduction To Seismic Essentials in GroningenKay Chan SothearaBelum ada peringkat
- IJIRAE::An Overviewof Analysis, Measurement and Modelling of Dynamics Properties of Composite Materials Using Oberst Beam MethodDokumen4 halamanIJIRAE::An Overviewof Analysis, Measurement and Modelling of Dynamics Properties of Composite Materials Using Oberst Beam MethodIJIRAE- International Journal of Innovative Research in Advanced EngineeringBelum ada peringkat
- Impact Hammer Product DataDokumen4 halamanImpact Hammer Product DatasadettinorhanBelum ada peringkat
- Dampers For Earthquake Vibration Control: Dr. Imad H. Mualla DAMPTECH Co., Ltd. DenmarkDokumen16 halamanDampers For Earthquake Vibration Control: Dr. Imad H. Mualla DAMPTECH Co., Ltd. Denmarkmuhammed mundhir100% (1)
- 4 Constitutive Equations: 4.1 ElasticityDokumen24 halaman4 Constitutive Equations: 4.1 ElasticityunastalavistaBelum ada peringkat
- 6 - Engesser's Theorem and Truss Deflections by Virtual Work PrinciplesDokumen14 halaman6 - Engesser's Theorem and Truss Deflections by Virtual Work PrinciplesFrans Alen SarmientoBelum ada peringkat
- BS8110 Column DesignDokumen11 halamanBS8110 Column DesignchaBelum ada peringkat
- SEMM Comp Dynamics Sp20Dokumen5 halamanSEMM Comp Dynamics Sp20RAFAELBelum ada peringkat
- Failure theories-IITMDokumen5 halamanFailure theories-IITMsunil_patil_38Belum ada peringkat
- Structural Dynamics Response ForcesDokumen4 halamanStructural Dynamics Response ForcesMD NayeemBelum ada peringkat
- Deep Beam Strut and Tie MethodDokumen14 halamanDeep Beam Strut and Tie Methodakash kumarBelum ada peringkat
- Viscoelastic hereditary integralsDokumen12 halamanViscoelastic hereditary integralsletter_ashish4444Belum ada peringkat
- Immediate Deflection in Concrete BeamsDokumen11 halamanImmediate Deflection in Concrete BeamsSeifeldin Ali MarzoukBelum ada peringkat
- Assignment 2 CVG 2140Dokumen8 halamanAssignment 2 CVG 2140KrisBelum ada peringkat
- Computational Fracture MechanicsDokumen58 halamanComputational Fracture MechanicsSanjay SinghBelum ada peringkat
- 100000Dokumen76 halaman100000Dandu ManBelum ada peringkat
- Solutions Introduction To Earthquake Engineering by Estrada & LeeDokumen6 halamanSolutions Introduction To Earthquake Engineering by Estrada & LeeُShamoon Abraham100% (1)
- Problem 1 1Dokumen21 halamanProblem 1 1Jingwei ZhongBelum ada peringkat
- 1 Logarthmic - DecrementDokumen5 halaman1 Logarthmic - DecrementAnup PatilBelum ada peringkat
- Newmark IntegrationDokumen12 halamanNewmark IntegrationOvidiu GenteanuBelum ada peringkat
- Buckling ExamplesDokumen5 halamanBuckling ExamplesSrivatsan SampathBelum ada peringkat
- Free Vibration of SDF SystemsDokumen14 halamanFree Vibration of SDF Systemspattrapong pongpattraBelum ada peringkat
- Ib RCC StructuresDokumen12 halamanIb RCC StructuresRaj BakhtaniBelum ada peringkat
- Stress AnalysisDokumen8 halamanStress Analysisram vomBelum ada peringkat
- Braced Excavation Part IIDokumen10 halamanBraced Excavation Part IIShayan AbagnaleBelum ada peringkat
- Engineering Mechanics NotesDokumen111 halamanEngineering Mechanics NotesAtul GaurBelum ada peringkat
- Unit 4 Symmetrical FaultsDokumen18 halamanUnit 4 Symmetrical FaultsjayababBelum ada peringkat
- Lateral Torsional Buckling of Steel BeamsDokumen14 halamanLateral Torsional Buckling of Steel BeamsBrendon GovaBelum ada peringkat
- Question Bank Unit IIDokumen10 halamanQuestion Bank Unit IISachin BharadwajBelum ada peringkat
- Mechanics of Solids IntroductionDokumen51 halamanMechanics of Solids IntroductionSatish DhanyamrajuBelum ada peringkat
- Advanced Mechanics of Solids - Question SetDokumen3 halamanAdvanced Mechanics of Solids - Question SetAshish ZachariahBelum ada peringkat
- Time History AnalysisDokumen4 halamanTime History AnalysisJavier MartinezBelum ada peringkat
- Deflection by Energy MethodsDokumen10 halamanDeflection by Energy MethodsMfonobong John EkottBelum ada peringkat
- Static Coeff Method STAAD PRODokumen7 halamanStatic Coeff Method STAAD PROAnonymous IwqK1NlBelum ada peringkat
- Design of JoistDokumen26 halamanDesign of Joistallen2912Belum ada peringkat
- Structural Dynamics Lecture OverviewDokumen36 halamanStructural Dynamics Lecture OverviewPurawin Subramaniam0% (1)
- Forced Vibration of MachinesDokumen108 halamanForced Vibration of Machinessolomonrajar100% (2)
- MECHANICAL VIBRATIONS LECTURE NOTESDokumen127 halamanMECHANICAL VIBRATIONS LECTURE NOTESChhagan kharolBelum ada peringkat
- Vibration FundamentalsDokumen60 halamanVibration Fundamentalsrukmini_ramkiBelum ada peringkat
- Chapter 3 - Free Damped Vibrations - Mechanical VibrationsDokumen21 halamanChapter 3 - Free Damped Vibrations - Mechanical Vibrationsumangthechamp100% (1)
- Va&c NotesDokumen130 halamanVa&c NotesNirmal R KennyBelum ada peringkat
- College of Technology - Riyadh: Kingdom of Saudi ArabiaDokumen87 halamanCollege of Technology - Riyadh: Kingdom of Saudi Arabiamohamed fattal100% (1)
- SDOFDokumen107 halamanSDOFMohammed B TuseBelum ada peringkat
- TurbinesDokumen15 halamanTurbinesDhiraj GillBelum ada peringkat
- Mount Zion College of Engineering and Technology, PudukkottaiDokumen27 halamanMount Zion College of Engineering and Technology, PudukkottaisolomonrajarBelum ada peringkat
- Pure Axial Flow With Aerofoil Theory .: Kaplan TurbineDokumen26 halamanPure Axial Flow With Aerofoil Theory .: Kaplan TurbinesolomonrajarBelum ada peringkat
- Prepared By: SOLOMON RAJA: Construction and Working of I.C. EngineDokumen68 halamanPrepared By: SOLOMON RAJA: Construction and Working of I.C. EnginesolomonrajarBelum ada peringkat
- Cost Benefit Analysis of A BusDokumen34 halamanCost Benefit Analysis of A BussolomonrajarBelum ada peringkat
- Mount Zion College Kinematics of Machinery Course OutlineDokumen162 halamanMount Zion College Kinematics of Machinery Course OutlinesolomonrajarBelum ada peringkat
- Automobile SyllabusDokumen157 halamanAutomobile SyllabussolomonrajarBelum ada peringkat
- Kottayam Institute of Technology and ScienceDokumen2 halamanKottayam Institute of Technology and SciencesolomonrajarBelum ada peringkat
- Mount Zion College of Engineering and Technology, PudukkottaiDokumen32 halamanMount Zion College of Engineering and Technology, PudukkottaisolomonrajarBelum ada peringkat
- Mount Zion College of Engineering and Technology, PudukkottaiDokumen27 halamanMount Zion College of Engineering and Technology, PudukkottaisolomonrajarBelum ada peringkat
- Mount Zion College of Engineering and Technology, PudukkottaiDokumen27 halamanMount Zion College of Engineering and Technology, PudukkottaisolomonrajarBelum ada peringkat
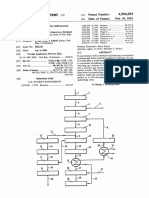
- Us 4994093Dokumen7 halamanUs 4994093solomonrajarBelum ada peringkat
- A Cost Benefit Analysis of A V2G-Capable Electric School Bus Compared To A Traditional Diesel School Bus Article As Accepted For PublicationDokumen25 halamanA Cost Benefit Analysis of A V2G-Capable Electric School Bus Compared To A Traditional Diesel School Bus Article As Accepted For PublicationMaureen MossBelum ada peringkat
- 5-Mechanism For ControlDokumen164 halaman5-Mechanism For ControlsolomonrajarBelum ada peringkat
- Forced Vibration of MachinesDokumen108 halamanForced Vibration of Machinessolomonrajar100% (2)
- 2 BalancingDokumen167 halaman2 BalancingsolomonrajarBelum ada peringkat
- GearologyDokumen132 halamanGearologyRyley McCarthyBelum ada peringkat
- Material Science Solid SolutionDokumen48 halamanMaterial Science Solid SolutionsolomonrajarBelum ada peringkat
- Struct ProblemsDokumen36 halamanStruct Problemsev xvBelum ada peringkat
- Structural Insulating Roof Deck: Standard Methods of TestingDokumen8 halamanStructural Insulating Roof Deck: Standard Methods of Testingalejo-peñaBelum ada peringkat
- One-way slab designDokumen22 halamanOne-way slab designGhiffa Syauqiyya Harahap 1707113714Belum ada peringkat
- Simplified Analysis of Continuous BeamsDokumen7 halamanSimplified Analysis of Continuous BeamsAmirBelum ada peringkat
- Static Study of Cantilever Beam Stiction Under Electrostatic Force InfluenceDokumen9 halamanStatic Study of Cantilever Beam Stiction Under Electrostatic Force InfluencebillalaxmanBelum ada peringkat
- Nonrepetitive Static Plate Load Tests of Soils and Flexible Pavement Components, For Use in Evaluation and Design of Airport and Highway PavementsDokumen3 halamanNonrepetitive Static Plate Load Tests of Soils and Flexible Pavement Components, For Use in Evaluation and Design of Airport and Highway Pavementsjbmune6683Belum ada peringkat
- Al-Kamyani Et Al. - 2019 - Impact of Shrinkage On Crack Width and DeflectionsDokumen10 halamanAl-Kamyani Et Al. - 2019 - Impact of Shrinkage On Crack Width and DeflectionsviolettaBelum ada peringkat
- Report Gayatri Devi BhandariDokumen46 halamanReport Gayatri Devi BhandariAcharya RabinBelum ada peringkat
- 9A21402 Aerospace Vehicle Structures IDokumen4 halaman9A21402 Aerospace Vehicle Structures IsivabharathamurthyBelum ada peringkat
- Online Engineering Calculators and Equation Tools Free - Engineers EdgeDokumen19 halamanOnline Engineering Calculators and Equation Tools Free - Engineers Edgejohn reyesBelum ada peringkat
- Purlins & GirtsDokumen105 halamanPurlins & Girtsrajkumar_chinniahBelum ada peringkat
- Static and Dynamic Analysis of Spur GearDokumen14 halamanStatic and Dynamic Analysis of Spur GearA Good FanBelum ada peringkat
- Beam TheoryDokumen7 halamanBeam TheoryserkanBelum ada peringkat
- Cantilever MatrixDokumen17 halamanCantilever MatrixMauricio Riquelme AlvaradoBelum ada peringkat
- Sozen, Ichinose & Pujol, Principles of Reinforced Concrete Design, CRC Press, 2014Dokumen8 halamanSozen, Ichinose & Pujol, Principles of Reinforced Concrete Design, CRC Press, 2014René Belizario TorresBelum ada peringkat
- Iso 22523Dokumen89 halamanIso 22523Narin PoonpunchaiBelum ada peringkat
- Drift Control and Damage in Tall BuildingsDokumen10 halamanDrift Control and Damage in Tall BuildingsL YO PinBelum ada peringkat
- 21 Me 435,435,435,435Dokumen40 halaman21 Me 435,435,435,435Faisal MehrbanBelum ada peringkat
- Chap 5. Beam Analysis and Design PDFDokumen61 halamanChap 5. Beam Analysis and Design PDFRafael Joshua LedesmaBelum ada peringkat
- Structural Calculation EOTDokumen9 halamanStructural Calculation EOTswatantar17100% (6)
- MS1553:2002 Code of Practice on Wind Loading for Building StructuresDokumen76 halamanMS1553:2002 Code of Practice on Wind Loading for Building StructuresJeana Lew SCBelum ada peringkat
- Purlin Girt ReinforcementDokumen16 halamanPurlin Girt ReinforcementmaheshbandhamBelum ada peringkat
- Beam A - 3.4m SpanDokumen5 halamanBeam A - 3.4m Spandarren cheethamBelum ada peringkat
- Pipe On SupportsDokumen8 halamanPipe On SupportsMahesh KoiladaBelum ada peringkat
- TAbles - Bending Moments Shear Forces and Deflection TAblesDokumen25 halamanTAbles - Bending Moments Shear Forces and Deflection TAblesikirby77Belum ada peringkat
- Laboratory WorksheetDokumen7 halamanLaboratory WorksheetamiraBelum ada peringkat
- WRD 12 (653) IS 5620 Recommendation For Structural Design Criteria For Low Head Slide Gates (Third Revision)Dokumen32 halamanWRD 12 (653) IS 5620 Recommendation For Structural Design Criteria For Low Head Slide Gates (Third Revision)Anup MitraBelum ada peringkat
- Knauf Ceiling BOQDokumen19 halamanKnauf Ceiling BOQpurchasehydBelum ada peringkat
- Astm E72 E72-15Dokumen13 halamanAstm E72 E72-15cristobal aguilar100% (1)
- Spile Bar DeflectionDokumen9 halamanSpile Bar DeflectionIsaac KendallBelum ada peringkat