Anda mungkin juga menyukai
- Modular Forms and Special Cycles on Shimura Curves. (AM-161)Dari EverandModular Forms and Special Cycles on Shimura Curves. (AM-161)Belum ada peringkat
- Lecture 13 Signal Flow Graphs and Mason, S RuleDokumen27 halamanLecture 13 Signal Flow Graphs and Mason, S RuleHamza KhanBelum ada peringkat
- 22 23Dokumen2 halaman22 23Goura Sundar TripathyBelum ada peringkat
- On the Cohomology of Certain Non-Compact Shimura Varieties (AM-173)Dari EverandOn the Cohomology of Certain Non-Compact Shimura Varieties (AM-173)Belum ada peringkat
- Old Question Paper Control SystemsDokumen7 halamanOld Question Paper Control SystemsSatendra KushwahaBelum ada peringkat
- 16-EL-A2 - Novembre 2017 - Version AnglaiseDokumen7 halaman16-EL-A2 - Novembre 2017 - Version AnglaiseKahina ZitouniBelum ada peringkat
- Lecture-7 Block Diagram Representation of Control SystemsDokumen41 halamanLecture-7 Block Diagram Representation of Control Systemsusama asifBelum ada peringkat
- 21 22Dokumen2 halaman21 22Goura Sundar TripathyBelum ada peringkat
- Reduction of Multiple SubsystemsDokumen52 halamanReduction of Multiple SubsystemsabdulBelum ada peringkat
- Función de TransferenciaDokumen3 halamanFunción de TransferenciaJonathan Ochoa PazBelum ada peringkat
- Tutorial 8Dokumen2 halamanTutorial 8Gaurav ABelum ada peringkat
- EE3301Dokumen3 halamanEE3301Charandeep TirkeyBelum ada peringkat
- Control Theory Quiz 1Dokumen5 halamanControl Theory Quiz 1Sundas Khalid100% (1)
- Process Control: Version 2 EE IIT, Kharagpur 1Dokumen13 halamanProcess Control: Version 2 EE IIT, Kharagpur 1Malyaj SrivastavaBelum ada peringkat
- 2019 Dec. EE303-F - Ktu QbankDokumen3 halaman2019 Dec. EE303-F - Ktu QbankharithaBelum ada peringkat
- Block DiagramDokumen75 halamanBlock DiagramJane Erestain BuenaobraBelum ada peringkat
- PTEE7301 April-2022Dokumen3 halamanPTEE7301 April-2022imman46920Belum ada peringkat
- One and A Half HoursDokumen6 halamanOne and A Half HoursMHUM84Belum ada peringkat
- Mech3418 Ca 2016Dokumen4 halamanMech3418 Ca 2016Barry PoonBelum ada peringkat
- Gujarat Technological University: Subject Code:2141004 Subject Name:Control System Engineering Time:10:30 AM To 01:00 PMDokumen3 halamanGujarat Technological University: Subject Code:2141004 Subject Name:Control System Engineering Time:10:30 AM To 01:00 PMvisupinuBelum ada peringkat
- Signals and Systems Laboratory 7Dokumen9 halamanSignals and Systems Laboratory 7Kthiha CnBelum ada peringkat
- Control System 1st Mid Term Paper July Dec 2015Dokumen17 halamanControl System 1st Mid Term Paper July Dec 2015VIPUL100% (1)
- EEE3005 Exam PaperDokumen6 halamanEEE3005 Exam PaperEthan OwBelum ada peringkat
- Ee 303 LCS December 2017Dokumen2 halamanEe 303 LCS December 2017Jerin AntonyBelum ada peringkat
- Eem307 Midterm Fall20Dokumen8 halamanEem307 Midterm Fall20Amil AzimliBelum ada peringkat
- Chapter 4Dokumen101 halamanChapter 4Sanji KarunaBelum ada peringkat
- The University of New South Wales School of Electrical Engineering and TelecommunicationsDokumen10 halamanThe University of New South Wales School of Electrical Engineering and TelecommunicationskikikikemBelum ada peringkat
- 7 - Transfer Function and State Space RepresentationsDokumen41 halaman7 - Transfer Function and State Space RepresentationsReem GheithBelum ada peringkat
- Gujarat Technological UniversityDokumen2 halamanGujarat Technological UniversityvisupinuBelum ada peringkat
- Control: Hooman SamaniDokumen43 halamanControl: Hooman SamaniGonzales PhanieBelum ada peringkat
- Slide 1 - Slide 1Dokumen52 halamanSlide 1 - Slide 1maketoBelum ada peringkat
- Control Systems-1 PDFDokumen8 halamanControl Systems-1 PDFmaheshbabu527Belum ada peringkat
- Control - System - Chapter 5 - 8EDokumen33 halamanControl - System - Chapter 5 - 8EE24089046林雯琪Belum ada peringkat
- PTEE7301 April-2021Dokumen2 halamanPTEE7301 April-2021imman46920Belum ada peringkat
- Nr-220206 Control SystemsDokumen8 halamanNr-220206 Control SystemsSrinivasa Rao G100% (1)
- Online Control Lecture #2Dokumen33 halamanOnline Control Lecture #2Noor GamingBelum ada peringkat
- K. Write Expression For The Motor Torque On The Load.: V S) V S)Dokumen3 halamanK. Write Expression For The Motor Torque On The Load.: V S) V S)Ganesha KumarBelum ada peringkat
- IE474 Summer2022 Nise Ch2 PartB Ch5 PDFDokumen24 halamanIE474 Summer2022 Nise Ch2 PartB Ch5 PDFAmon SimatwoBelum ada peringkat
- BMS College of Engineering, Bangalore-560019: May 2016 Semester End Main ExaminationsDokumen3 halamanBMS College of Engineering, Bangalore-560019: May 2016 Semester End Main Examinationskoushik bhatBelum ada peringkat
- Control System - 1 PYQsDokumen7 halamanControl System - 1 PYQsAbhishekBelum ada peringkat
- Blok DiagramDokumen43 halamanBlok DiagramBagoessngenger DwiBelum ada peringkat
- ELE 4623: Control Systems: Faculty of Engineering TechnologyDokumen14 halamanELE 4623: Control Systems: Faculty of Engineering TechnologyMaitha SaeedBelum ada peringkat
- Chapter 2 - Reduction of Multiple SystemDokumen46 halamanChapter 2 - Reduction of Multiple SystemHaqeemee HusseinBelum ada peringkat
- WWW - Manaresults.Co - In: Define Stability. What Is Routh Stability Criterion?Dokumen2 halamanWWW - Manaresults.Co - In: Define Stability. What Is Routh Stability Criterion?mushahedBelum ada peringkat
- Unit 7 - Dynamic Behaviour of Feedback Control Systems 2022Dokumen44 halamanUnit 7 - Dynamic Behaviour of Feedback Control Systems 2022rafitara78Belum ada peringkat
- 16-EL-A2 - Mai 2017 - Version AnglaiseDokumen7 halaman16-EL-A2 - Mai 2017 - Version Anglaisemadani abdelhamidBelum ada peringkat
- Knowledge K1 - Remembering K3 - Applying K5 - Evaluating Levels (KL) K2 - Understanding K4 - Analyzing K6 - Creating Course OutcomeDokumen3 halamanKnowledge K1 - Remembering K3 - Applying K5 - Evaluating Levels (KL) K2 - Understanding K4 - Analyzing K6 - Creating Course Outcomedivine wolfBelum ada peringkat
- Lecture 2-Block Diagram Reduction TechniquesDokumen71 halamanLecture 2-Block Diagram Reduction TechniquesNoor AhmedBelum ada peringkat
- Electrical Engineering Previous Paper-1998Dokumen14 halamanElectrical Engineering Previous Paper-1998bjs203Belum ada peringkat
- Civil Service - Electrical Engineering Prelims 1998-2007Dokumen129 halamanCivil Service - Electrical Engineering Prelims 1998-2007binoy_ju07100% (1)
- Advanced Control Theory (Eee)Dokumen3 halamanAdvanced Control Theory (Eee)Adarsh VkBelum ada peringkat
- AE61Dokumen4 halamanAE61Anima SenBelum ada peringkat
- Question Paper Code: 18641: Reg. NoDokumen4 halamanQuestion Paper Code: 18641: Reg. NoNaveen Raj EBelum ada peringkat
- Chapter 10 - Stability of Closed-Loop Control SystemsDokumen27 halamanChapter 10 - Stability of Closed-Loop Control SystemsFakhrulShahrilEzanieBelum ada peringkat
- Root Locus Bonus v2Dokumen7 halamanRoot Locus Bonus v2AmreshAmanBelum ada peringkat
- Chapter5-Reduction of SystemsDokumen33 halamanChapter5-Reduction of Systemsعمر الفهدBelum ada peringkat
- Unit1 Block DiagramDokumen75 halamanUnit1 Block DiagramPrasidha PrabhuBelum ada peringkat
- Lecture 11Dokumen37 halamanLecture 11t.giannoneBelum ada peringkat
- EEG Based Brain Source Localization Comparison of sLORETA and eLORETADokumen10 halamanEEG Based Brain Source Localization Comparison of sLORETA and eLORETAHamza KhanBelum ada peringkat
- Lecture 16, 17 Steady-State Error For Unity Feedback SystemDokumen29 halamanLecture 16, 17 Steady-State Error For Unity Feedback SystemHamza KhanBelum ada peringkat
- Lecture 20 Root Locus Introduction and DefinitionDokumen21 halamanLecture 20 Root Locus Introduction and DefinitionHamza KhanBelum ada peringkat
- Lecture 19 Steady-State Error For Nonunity Feedback SystemsDokumen19 halamanLecture 19 Steady-State Error For Nonunity Feedback SystemsHamza KhanBelum ada peringkat
- Lecture 18 Static Error Constants and System TypeDokumen21 halamanLecture 18 Static Error Constants and System TypeHamza KhanBelum ada peringkat
- Lecture 14, 15 StabilityDokumen45 halamanLecture 14, 15 StabilityHamza KhanBelum ada peringkat
- 3-Lecture 03 Translational Mechanical System3-SDokumen23 halaman3-Lecture 03 Translational Mechanical System3-SHamza KhanBelum ada peringkat
- 12-Lecture 07 Pole, Zeros and Time Response of First and 2nd Order SystemsDokumen30 halaman12-Lecture 07 Pole, Zeros and Time Response of First and 2nd Order SystemsHamza KhanBelum ada peringkat
- 14-Lecture 10, 11 Systems Response With Additional Poles and ZeroesDokumen36 halaman14-Lecture 10, 11 Systems Response With Additional Poles and ZeroesHamza KhanBelum ada peringkat
- 1-Lecture 01 IntroductionDokumen29 halaman1-Lecture 01 IntroductionHamza KhanBelum ada peringkat
- Lecture 14 StabilityDokumen26 halamanLecture 14 StabilityHamza KhanBelum ada peringkat
- 8-Lecture 39 TF To SS and SS To TF ConversionDokumen18 halaman8-Lecture 39 TF To SS and SS To TF ConversionHamza KhanBelum ada peringkat
- 5-Lecture 05 Electromechanical Systems Transfer FunctionsDokumen13 halaman5-Lecture 05 Electromechanical Systems Transfer FunctionsHamza Khan100% (1)
- 10-Lecture 41, 42 Pole PlacementDokumen18 halaman10-Lecture 41, 42 Pole PlacementHamza KhanBelum ada peringkat
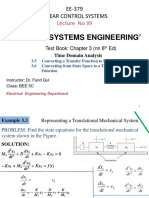
- 6-Lecture 37 Time Domain AnalysisDokumen17 halaman6-Lecture 37 Time Domain AnalysisHamza KhanBelum ada peringkat
- 7-Lecture 38 State Space RepresentationDokumen16 halaman7-Lecture 38 State Space RepresentationHamza KhanBelum ada peringkat
- 2-Lecture 02 Electrical Networks Transfer FunctionDokumen18 halaman2-Lecture 02 Electrical Networks Transfer FunctionHamza KhanBelum ada peringkat
- Position PaperDokumen9 halamanPosition PaperRoel PalmairaBelum ada peringkat
- Class Participation 9 E7-18: Last Name - First Name - IDDokumen2 halamanClass Participation 9 E7-18: Last Name - First Name - IDaj singhBelum ada peringkat
- Viper 5000 Installations Guide PDFDokumen39 halamanViper 5000 Installations Guide PDFvakakoBelum ada peringkat
- Arab Open University B326: Advanced Financial Accounting TMA - Spring 2022-2023 V2Dokumen7 halamanArab Open University B326: Advanced Financial Accounting TMA - Spring 2022-2023 V2samiaBelum ada peringkat
- Forty Years Ago, December 1, 1980 - PM On Prices - The Indian ExpressDokumen8 halamanForty Years Ago, December 1, 1980 - PM On Prices - The Indian ExpresshabeebBelum ada peringkat
- Public Instructions For Death CorrectionsDokumen4 halamanPublic Instructions For Death CorrectionsMukuru TechnologiesBelum ada peringkat
- 101 Union of Filipro Employees Vs Vivar (Labor)Dokumen1 halaman101 Union of Filipro Employees Vs Vivar (Labor)Kayelyn Lat100% (1)
- Drg-25 Parts List: Key No Parts No Parts Name Key No Parts No Parts NameDokumen1 halamanDrg-25 Parts List: Key No Parts No Parts Name Key No Parts No Parts NameGergely IvánovicsBelum ada peringkat
- STAAD Seismic AnalysisDokumen5 halamanSTAAD Seismic AnalysismabuhamdBelum ada peringkat
- Wind Turbines Fundamentals Technologies Application Economics 2nd EditionDokumen3 halamanWind Turbines Fundamentals Technologies Application Economics 2nd Editionhafidztampan0% (1)
- AP Physics Name: AP Thermal PracticeDokumen2 halamanAP Physics Name: AP Thermal PracticeMuddamsetty ArunkalyanBelum ada peringkat
- EquisetopsidaDokumen4 halamanEquisetopsidax456456456xBelum ada peringkat
- Siemens Power Engineering Guide 7E 223Dokumen1 halamanSiemens Power Engineering Guide 7E 223mydearteacherBelum ada peringkat
- Types of Foundation and Their Uses in Building ConstructionDokumen4 halamanTypes of Foundation and Their Uses in Building ConstructionCraig MBelum ada peringkat
- Java PT Android PDFDokumen201 halamanJava PT Android PDFlaurablue96Belum ada peringkat
- Architectural Challenges in Agile PracticeDokumen4 halamanArchitectural Challenges in Agile PracticePranab PyneBelum ada peringkat
- 1849 1862 Statutes at Large 601-779Dokumen200 halaman1849 1862 Statutes at Large 601-779ncwazzyBelum ada peringkat
- Pharmacology NCLEX QuestionsDokumen128 halamanPharmacology NCLEX QuestionsChristine Williams100% (2)
- Solution Manual For Labor Relations Development Structure Process 12th Edition Fossum 0077862473 9780077862473Dokumen16 halamanSolution Manual For Labor Relations Development Structure Process 12th Edition Fossum 0077862473 9780077862473savannahzavalaxodtfznisq100% (27)
- Marketing Research ProjectDokumen37 halamanMarketing Research ProjectVijay100% (15)
- Arvind Textiles Internship ReportDokumen107 halamanArvind Textiles Internship ReportDipan SahooBelum ada peringkat
- UntitledDokumen1 halamanUntitledsai gamingBelum ada peringkat
- 99990353-Wsi4-2 C1D2-7940022562 7950022563 7940022564Dokumen2 halaman99990353-Wsi4-2 C1D2-7940022562 7950022563 7940022564alltheloveintheworldBelum ada peringkat
- Microfluidic and Paper-Based Devices: Recent Advances Noninvasive Tool For Disease Detection and DiagnosisDokumen45 halamanMicrofluidic and Paper-Based Devices: Recent Advances Noninvasive Tool For Disease Detection and DiagnosisPatelki SoloBelum ada peringkat
- Latest Eassy Writing Topics For PracticeDokumen18 halamanLatest Eassy Writing Topics For PracticeAnjani Kumar RaiBelum ada peringkat
- Normas FieldbusDokumen3 halamanNormas FieldbusAlielson PazBelum ada peringkat
- Challenges Faced by DMRCDokumen2 halamanChallenges Faced by DMRCSourabh Kr67% (3)
- ITMC (International Transmission Maintenance Center)Dokumen8 halamanITMC (International Transmission Maintenance Center)akilaamaBelum ada peringkat
- SummaryDokumen50 halamanSummarygirjesh kumarBelum ada peringkat
- Forod 2bac en s2 6 PDFDokumen4 halamanForod 2bac en s2 6 PDFwwe foreverBelum ada peringkat