Anda mungkin juga menyukai
- Practice Problems For Exam 3 - SolutionDokumen19 halamanPractice Problems For Exam 3 - SolutionJosiah McDanielBelum ada peringkat
- Operations Management FundamentalsDokumen129 halamanOperations Management FundamentalsSai Charan RajBelum ada peringkat
- Chapter 1 Operations and ProcessesDokumen15 halamanChapter 1 Operations and Processesdale2741830Belum ada peringkat
- Supply Chain Management: 9 Planning Supply and Demand in A Supply Chain: Managing Predictable VariabilityDokumen28 halamanSupply Chain Management: 9 Planning Supply and Demand in A Supply Chain: Managing Predictable VariabilitySanjay NayakBelum ada peringkat
- Introduction To LP - Transshipment ProblemDokumen26 halamanIntroduction To LP - Transshipment Problemmanish_k_pandeyBelum ada peringkat
- Solved Assignment - Mba IIDokumen135 halamanSolved Assignment - Mba IIAnoop VermaBelum ada peringkat
- Book Selection Using TOPSIS MethodDokumen8 halamanBook Selection Using TOPSIS MethodAlexandra LeonardoBelum ada peringkat
- Supplier Assesment SCMDokumen22 halamanSupplier Assesment SCMNiranjan ThiruchunapalliBelum ada peringkat
- Multi-Criteria Decision Making: Topsis MethodDokumen21 halamanMulti-Criteria Decision Making: Topsis MethodMonibaKhan100% (1)
- 1998 - A Method For VRP With Multiple Vehicle Types and TWDokumen11 halaman1998 - A Method For VRP With Multiple Vehicle Types and TWBurak ErdemBelum ada peringkat
- The Business Case For Spend Analysis V1.0Dokumen25 halamanThe Business Case For Spend Analysis V1.0NitinBelum ada peringkat
- Inventory Management NotesDokumen41 halamanInventory Management Notesmoza salimBelum ada peringkat
- Optimization Basic ConceptsDokumen5 halamanOptimization Basic Conceptsjyothis_joy8315Belum ada peringkat
- Cold Chain Logistics:Evolving Scenarios: by Group 12Dokumen20 halamanCold Chain Logistics:Evolving Scenarios: by Group 12Sudhanshu S Thakore100% (1)
- Aggregate PlanningDokumen7 halamanAggregate PlanningbalashankarrBelum ada peringkat
- Chopra3 - PPT - ch13 - Supply Chain ManagementDokumen19 halamanChopra3 - PPT - ch13 - Supply Chain ManagementPooja ShahBelum ada peringkat
- Logistics Cost ReductionDokumen54 halamanLogistics Cost ReductionDr.Rameshwar DubeyBelum ada peringkat
- Facility Location ProblemsDokumen5 halamanFacility Location ProblemsHrdk Dve100% (1)
- Applications of Operations Research in Supply Chain ManagementDokumen8 halamanApplications of Operations Research in Supply Chain ManagementInternational Journal of Innovative Science and Research TechnologyBelum ada peringkat
- Lect 12 EOQ SCMDokumen38 halamanLect 12 EOQ SCMApporva MalikBelum ada peringkat
- Formulation of LP Problems-130928022247-Phpapp02Dokumen13 halamanFormulation of LP Problems-130928022247-Phpapp02Anish MonachanBelum ada peringkat
- SMch07 RADokumen8 halamanSMch07 RACoriolisTimBelum ada peringkat
- OR2 - Transportation Cost Optimization - Nawaf Alshaikh1Dokumen7 halamanOR2 - Transportation Cost Optimization - Nawaf Alshaikh1Nawaf ALshaikhBelum ada peringkat
- Inventory ManagementDokumen6 halamanInventory ManagementHimanshu SharmaBelum ada peringkat
- A Study On Barriers To E-Commerce Adoption in Vadodara District SMEsDokumen15 halamanA Study On Barriers To E-Commerce Adoption in Vadodara District SMEsKushagra purohitBelum ada peringkat
- (U E in - Ppa) NotesDokumen28 halaman(U E in - Ppa) NotesSumedh Kakde100% (1)
- Gameplan CaseDokumen5 halamanGameplan Casecoolavi0127Belum ada peringkat
- Just in TimeDokumen23 halamanJust in TimeAdnan SheikhBelum ada peringkat
- Business and Consumer EthicsDokumen10 halamanBusiness and Consumer EthicsGary WongBelum ada peringkat
- IV Sem MBA - TM - Supply Chain Management Model Paper 2013Dokumen2 halamanIV Sem MBA - TM - Supply Chain Management Model Paper 2013vikramvsu0% (1)
- Strategic AlliancesDokumen23 halamanStrategic AlliancesViraj DhuriBelum ada peringkat
- Forecasting Method Toshiba Corporation AtionDokumen21 halamanForecasting Method Toshiba Corporation AtionTanvir JahanBelum ada peringkat
- Fuzzy TOPSIS Method For Ranking Renewable Energy Supply Systems in TurkeyDokumen9 halamanFuzzy TOPSIS Method For Ranking Renewable Energy Supply Systems in TurkeyJorge BessaBelum ada peringkat
- Aggregate Planning in The Supply ChainDokumen15 halamanAggregate Planning in The Supply ChainPrasad GantiBelum ada peringkat
- MSC in Operational Research Operational Techniques 1 Operational ResearchDokumen10 halamanMSC in Operational Research Operational Techniques 1 Operational ResearchGangaa ShelviBelum ada peringkat
- Subject: Logistic Management: Course: Attempt Any Five Questions (16 Marks Each)Dokumen11 halamanSubject: Logistic Management: Course: Attempt Any Five Questions (16 Marks Each)Sailpoint CourseBelum ada peringkat
- Opportunity Cost, Marginal Analysis, RationalismDokumen33 halamanOpportunity Cost, Marginal Analysis, Rationalismbalram nayakBelum ada peringkat
- What Is Spend AnalysisDokumen35 halamanWhat Is Spend AnalysisMahesh NaiduBelum ada peringkat
- Transportation Problem A Special Case For Linear Programming Problems PDFDokumen36 halamanTransportation Problem A Special Case For Linear Programming Problems PDFCaz Tee-NahBelum ada peringkat
- Exam ManualDokumen10 halamanExam Manualh_badgujarBelum ada peringkat
- Plant Layout Notes Chapter 2Dokumen10 halamanPlant Layout Notes Chapter 2KUBAL MANOJ SHAMSUNDARBelum ada peringkat
- Agriculture Supply Chain: A Systematic Review of Literature and Implications For Future ResearchDokumen54 halamanAgriculture Supply Chain: A Systematic Review of Literature and Implications For Future ResearchcmwainainaBelum ada peringkat
- Heizer 13 Aggregate Planning 2016Dokumen59 halamanHeizer 13 Aggregate Planning 2016Saskia Asyari100% (1)
- 0-1 Integer Linear Programming Model For Location Selection of Fire Station: A Case Study in IndonesiaDokumen8 halaman0-1 Integer Linear Programming Model For Location Selection of Fire Station: A Case Study in IndonesiaAbed Soliman100% (1)
- Fowler Distributing Company: ProposalDokumen16 halamanFowler Distributing Company: ProposalBiswajeet MishraBelum ada peringkat
- A Survey On Vehicle Routing Problems: The Vehicle Routing Problem With Time Windows and The Capacitated Vehicle Routing ProblemDokumen5 halamanA Survey On Vehicle Routing Problems: The Vehicle Routing Problem With Time Windows and The Capacitated Vehicle Routing ProblemJoshua McDonaghBelum ada peringkat
- Business Intelligent - Assignment 1 - Greenwich FPTDokumen15 halamanBusiness Intelligent - Assignment 1 - Greenwich FPTQuách Công TuấnBelum ada peringkat
- Pricing EconomicsDokumen59 halamanPricing EconomicsJai JohnBelum ada peringkat
- A Project On The Economic Order QuantityDokumen26 halamanA Project On The Economic Order QuantityFortune Fmx MushongaBelum ada peringkat
- Decision TreesDokumen53 halamanDecision TreesRashid MahmoodBelum ada peringkat
- LPP SimplexDokumen107 halamanLPP SimplexAynalemBelum ada peringkat
- Solution of Multi Objective Transportation ProblemDokumen7 halamanSolution of Multi Objective Transportation ProblemEditor IJTSRDBelum ada peringkat
- Role of Data Analytics in Supply Chain ManagementDokumen9 halamanRole of Data Analytics in Supply Chain ManagementPreeth KalaBelum ada peringkat
- Operations Management (OPM530) C11 MaintenanceDokumen29 halamanOperations Management (OPM530) C11 Maintenanceazwan ayopBelum ada peringkat
- Value Stream Mapping: Literature Review and Implications For Indian IndustryDokumen11 halamanValue Stream Mapping: Literature Review and Implications For Indian IndustryMohamed SafeerBelum ada peringkat
- I.R. Chapter-2 Dr. K.panditDokumen10 halamanI.R. Chapter-2 Dr. K.panditDeepak KumarBelum ada peringkat
- Case Study - ABC CostingDokumen3 halamanCase Study - ABC CostingDaiannaBelum ada peringkat
- Multi Criteria Decision Making - PresentationDokumen10 halamanMulti Criteria Decision Making - Presentationaditya719Belum ada peringkat
- Goal Programming Mod MMDokumen40 halamanGoal Programming Mod MMJapa SonBelum ada peringkat
- Goal ProgrammingDokumen48 halamanGoal ProgrammingRajyalakshmiBelum ada peringkat
- How To Configure PowerMACS 4000 As A PROFINET IO Slave With Siemens S7Dokumen20 halamanHow To Configure PowerMACS 4000 As A PROFINET IO Slave With Siemens S7kukaBelum ada peringkat
- Configuring BGP On Cisco Routers Lab Guide 3.2Dokumen106 halamanConfiguring BGP On Cisco Routers Lab Guide 3.2skuzurov67% (3)
- Iguana Joe's Lawsuit - September 11, 2014Dokumen14 halamanIguana Joe's Lawsuit - September 11, 2014cindy_georgeBelum ada peringkat
- India TeenagersDokumen3 halamanIndia TeenagersPaul Babu ThundathilBelum ada peringkat
- EqualLogic Release and Support Policy v25Dokumen7 halamanEqualLogic Release and Support Policy v25du2efsBelum ada peringkat
- Notes:: Reinforcement in Manhole Chamber With Depth To Obvert Greater Than 3.5M and Less Than 6.0MDokumen1 halamanNotes:: Reinforcement in Manhole Chamber With Depth To Obvert Greater Than 3.5M and Less Than 6.0Mسجى وليدBelum ada peringkat
- Where We Are in Place and Time "We Are Part of The Universe and Feel Compelled To Explore It."Dokumen1 halamanWhere We Are in Place and Time "We Are Part of The Universe and Feel Compelled To Explore It."Safia-umm Suhaim- FareedBelum ada peringkat
- What Are The Spacer Bars in RC Beams - QuoraDokumen3 halamanWhat Are The Spacer Bars in RC Beams - QuoradesignBelum ada peringkat
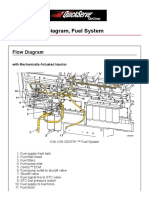
- Cummin C1100 Fuel System Flow DiagramDokumen8 halamanCummin C1100 Fuel System Flow DiagramDaniel KrismantoroBelum ada peringkat
- KsDokumen5 halamanKsnurlatifahBelum ada peringkat
- 1 - 2020-CAP Surveys CatalogDokumen356 halaman1 - 2020-CAP Surveys CatalogCristiane AokiBelum ada peringkat
- Biography Thesis ExamplesDokumen7 halamanBiography Thesis Examplesreneewardowskisterlingheights100% (2)
- Genetics Icar1Dokumen18 halamanGenetics Icar1elanthamizhmaranBelum ada peringkat
- Sociology As A Form of Consciousness - 20231206 - 013840 - 0000Dokumen4 halamanSociology As A Form of Consciousness - 20231206 - 013840 - 0000Gargi sharmaBelum ada peringkat
- Quarter 1-Week 2 - Day 2.revisedDokumen4 halamanQuarter 1-Week 2 - Day 2.revisedJigz FamulaganBelum ada peringkat
- Physics Education Thesis TopicsDokumen4 halamanPhysics Education Thesis TopicsPaperWriterServicesCanada100% (2)
- Pidsdps 2106Dokumen174 halamanPidsdps 2106Steven Claude TanangunanBelum ada peringkat
- ASHRAE Journal - Absorption RefrigerationDokumen11 halamanASHRAE Journal - Absorption Refrigerationhonisme0% (1)
- Wner'S Anual: Led TVDokumen32 halamanWner'S Anual: Led TVErmand WindBelum ada peringkat
- John L. Selzer - Merit and Degree in Webster's - The Duchess of MalfiDokumen12 halamanJohn L. Selzer - Merit and Degree in Webster's - The Duchess of MalfiDivya AggarwalBelum ada peringkat
- Student Exploration: Inclined Plane - Simple MachineDokumen9 halamanStudent Exploration: Inclined Plane - Simple MachineLuka MkrtichyanBelum ada peringkat
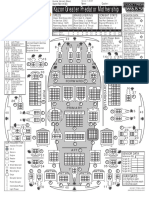
- Kazon Greater Predator MothershipDokumen1 halamanKazon Greater Predator MothershipknavealphaBelum ada peringkat
- postedcontentadminuploadsFAQs20for20Organization PDFDokumen10 halamanpostedcontentadminuploadsFAQs20for20Organization PDFMohd Adil AliBelum ada peringkat
- Shakespeare Sonnet EssayDokumen3 halamanShakespeare Sonnet Essayapi-5058594660% (1)
- FuzzingBluetooth Paul ShenDokumen8 halamanFuzzingBluetooth Paul Shen许昆Belum ada peringkat
- Sem4 Complete FileDokumen42 halamanSem4 Complete Fileghufra baqiBelum ada peringkat
- DBMS Lab ManualDokumen57 halamanDBMS Lab ManualNarendh SubramanianBelum ada peringkat
- Canoe Matlab 001Dokumen58 halamanCanoe Matlab 001Coolboy RoadsterBelum ada peringkat
- Anemia in PregnancyDokumen5 halamanAnemia in PregnancycfgrtwifhBelum ada peringkat
- Apple Change ManagementDokumen31 halamanApple Change ManagementimuffysBelum ada peringkat