Anda mungkin juga menyukai
- Analysis Design Asynchronous Sequential CircuitsDokumen72 halamanAnalysis Design Asynchronous Sequential Circuitskumarguptav9175% (4)
- Ec 1201digital ElectronicsDokumen58 halamanEc 1201digital ElectronicsSubathra Devi MourouganeBelum ada peringkat
- Asynchronous Circuits PDFDokumen31 halamanAsynchronous Circuits PDFSenthil KumarBelum ada peringkat
- Asynchronous Sequential LogicDokumen31 halamanAsynchronous Sequential LogickirthicaBelum ada peringkat
- CEN214 - Asynchronous Circuit PDFDokumen85 halamanCEN214 - Asynchronous Circuit PDFAboNawaFBelum ada peringkat
- Thermodynamics. Short FormulasDokumen16 halamanThermodynamics. Short FormulasDarshiniBelum ada peringkat
- 19 Async Analysis and Design v1Dokumen35 halaman19 Async Analysis and Design v1muralik_64Belum ada peringkat
- Question Bank Unit 4-1Dokumen3 halamanQuestion Bank Unit 4-1birajkushwaha1996Belum ada peringkat
- Synchronous Sequential LogicDokumen95 halamanSynchronous Sequential LogicGlenda OfianaBelum ada peringkat
- Notes 326 Set11Dokumen16 halamanNotes 326 Set11Dhanu ChettyBelum ada peringkat
- Chapter 6 - Introduction To Sequential DevicesDokumen62 halamanChapter 6 - Introduction To Sequential DevicesSarath Chandra SBelum ada peringkat
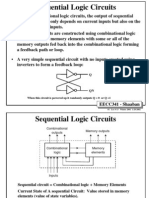
- Sequential Circuits PDFDokumen8 halamanSequential Circuits PDFXavier SebastiaoBelum ada peringkat
- 31 Analysis Design Asynchronous Sequential Circuits PDFDokumen72 halaman31 Analysis Design Asynchronous Sequential Circuits PDFpcjoshi02Belum ada peringkat
- Sequential Circuit AnalysisDokumen15 halamanSequential Circuit AnalysisJeth Gato VestalBelum ada peringkat
- Chapter 4 Flip Flop-ROBIAHDokumen50 halamanChapter 4 Flip Flop-ROBIAHKelvin YipBelum ada peringkat
- Chapter 4 Flip Flop-ROBIAHDokumen50 halamanChapter 4 Flip Flop-ROBIAHIqmal Shah Putra50% (2)
- Dig ElecDokumen116 halamanDig ElecPham PunBelum ada peringkat
- Unit-5 Asynchronus Sequential LogicDokumen61 halamanUnit-5 Asynchronus Sequential LogicjhalakBelum ada peringkat
- AsyncDokumen63 halamanAsyncsenthilBelum ada peringkat
- Asynchronous Sequential NetworkDokumen20 halamanAsynchronous Sequential NetworkGulzar Ahamd100% (1)
- Sequential Circuits: Logic and Computer Design FundamentalsDokumen50 halamanSequential Circuits: Logic and Computer Design FundamentalsYawar Abbas KhanBelum ada peringkat
- EC303 Lab2 StudentDokumen7 halamanEC303 Lab2 StudentZahir ZabidiBelum ada peringkat
- DPSD Model Question Bank With AnswersDokumen7 halamanDPSD Model Question Bank With AnswersAkash SanjeevBelum ada peringkat
- Asl in VHDL ImppppppDokumen11 halamanAsl in VHDL ImppppppSumit ChopraBelum ada peringkat
- Report 1 (D2, Digital)Dokumen10 halamanReport 1 (D2, Digital)Kian YingBelum ada peringkat
- Fundamentals of FlipflopsDokumen52 halamanFundamentals of FlipflopskanchiBelum ada peringkat
- Enel3de IntrosequentialcircuitsDokumen49 halamanEnel3de IntrosequentialcircuitsZamani MhlongoBelum ada peringkat
- Synchronous Sequential Ckts by Lakshmi NarayanaDokumen30 halamanSynchronous Sequential Ckts by Lakshmi NarayanaMurali Krishna100% (1)
- LogicDesign CHPT 10Dokumen31 halamanLogicDesign CHPT 10john juanBelum ada peringkat
- SN1-2223-Lab3 1-2 EngDokumen4 halamanSN1-2223-Lab3 1-2 EngBoualem MestafaBelum ada peringkat
- GATE+ISRO DIGITAL LOGIC AND COMPUTER ORGANIZATION 2015 - Sequential CircuitsDokumen35 halamanGATE+ISRO DIGITAL LOGIC AND COMPUTER ORGANIZATION 2015 - Sequential CircuitsRejinRajanBelum ada peringkat
- Week 9 CPE101 - AsynchronousDokumen21 halamanWeek 9 CPE101 - AsynchronousJohn Patrick CeldaBelum ada peringkat
- DCD Unit - 3Dokumen33 halamanDCD Unit - 3Prathap VuyyuruBelum ada peringkat
- Ram6n: Sliding Mode Controller For The Boost InverterDokumen6 halamanRam6n: Sliding Mode Controller For The Boost InverterskrtamilBelum ada peringkat
- LD5 Mano Ch5Dokumen37 halamanLD5 Mano Ch5Amr HefnyBelum ada peringkat
- Sequential Logic CircuitsDokumen15 halamanSequential Logic Circuitsmps125Belum ada peringkat
- Chattering Phenomenon Supression of Buck Boost DC-DC Converter With Fuzzy Sliding Modes ControlDokumen6 halamanChattering Phenomenon Supression of Buck Boost DC-DC Converter With Fuzzy Sliding Modes ControlVenkata SubramanianBelum ada peringkat
- Logic Circuit & Switching Theory Sequencial Logic CircuitsDokumen67 halamanLogic Circuit & Switching Theory Sequencial Logic CircuitsAngelica FangonBelum ada peringkat
- Group2 Ece142Dokumen61 halamanGroup2 Ece142Angelica FangonBelum ada peringkat
- Notes 326 Set8Dokumen16 halamanNotes 326 Set8Bakshi AmitBelum ada peringkat
- Term Paper 2015Dokumen13 halamanTerm Paper 2015Baijayanti DasBelum ada peringkat
- DLD Digital NotesDokumen101 halamanDLD Digital NotesanithaBelum ada peringkat
- Unit IvDokumen66 halamanUnit IvHarriet Linda CBelum ada peringkat
- Cmos Sequential CircuitsDokumen33 halamanCmos Sequential Circuitslachuns123Belum ada peringkat
- Logic Circuit & Switching Theory Sequencial Logic CircuitsDokumen66 halamanLogic Circuit & Switching Theory Sequencial Logic CircuitsAngelica FangonBelum ada peringkat
- Seat Work FinalDokumen9 halamanSeat Work FinalRuen Vincent NarosaBelum ada peringkat
- Erii5 555 Timer Astable OperationDokumen16 halamanErii5 555 Timer Astable OperationAnonymous VASS3z0wTHBelum ada peringkat
- Experiment 5 Monsoon, 2008 Latches and Flip-Flops: Digital Logic & ProcessorDokumen2 halamanExperiment 5 Monsoon, 2008 Latches and Flip-Flops: Digital Logic & ProcessorUtkar ShBelum ada peringkat
- Chp1 - Latches and Flip-FlopsDokumen44 halamanChp1 - Latches and Flip-FlopsAbnen OngBelum ada peringkat
- Synchronous Sequential LogicDokumen69 halamanSynchronous Sequential Logic魏延任Belum ada peringkat
- Unit 11 - Sequential Logic Systems 1Dokumen9 halamanUnit 11 - Sequential Logic Systems 1Traian VladuBelum ada peringkat
- Topic 2 - Subtopic 2.3Dokumen31 halamanTopic 2 - Subtopic 2.3Navinaash Chanthra SegaranBelum ada peringkat
- DLC Unit 3Dokumen83 halamanDLC Unit 3kkr kkrBelum ada peringkat
- Chapter 5 UpdatedDokumen54 halamanChapter 5 UpdatedAttiq RehmanBelum ada peringkat
- Analysis of Non-Isolated Bidirectional DC-DC Converter With ZVSDokumen7 halamanAnalysis of Non-Isolated Bidirectional DC-DC Converter With ZVSAnuja VargheseBelum ada peringkat
- Switched-Capaci T 6 - D C Converter Inrush Current and LowDokumen7 halamanSwitched-Capaci T 6 - D C Converter Inrush Current and LowHamid BoualiBelum ada peringkat
- Design A Combinatorial Circuit 863832727868Dokumen5 halamanDesign A Combinatorial Circuit 863832727868Siva Guru0% (1)
- Fundamentals of Electronics 1: Electronic Components and Elementary FunctionsDari EverandFundamentals of Electronics 1: Electronic Components and Elementary FunctionsBelum ada peringkat
- Advanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkDari EverandAdvanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkBelum ada peringkat
- Fundamentals of Electronics 2: Continuous-time Signals and SystemsDari EverandFundamentals of Electronics 2: Continuous-time Signals and SystemsBelum ada peringkat
- Genesis: Exam: Residency Regular Mock-2 (100 Question) MS Faculty 2021Dokumen38 halamanGenesis: Exam: Residency Regular Mock-2 (100 Question) MS Faculty 2021Arannya MonzurBelum ada peringkat
- Awareness Support in Distributed Software Development: A Systematic Review and Mapping of The LiteratureDokumen46 halamanAwareness Support in Distributed Software Development: A Systematic Review and Mapping of The LiteratureArannya MonzurBelum ada peringkat
- Persistence For TDADokumen107 halamanPersistence For TDAArannya MonzurBelum ada peringkat
- Nachos Assignment #2: MultiprogrammingDokumen2 halamanNachos Assignment #2: MultiprogrammingArannya MonzurBelum ada peringkat
- Decant PricesDokumen24 halamanDecant PricesArannya MonzurBelum ada peringkat
- CSE 304 - Database Systems Lab ManualDokumen51 halamanCSE 304 - Database Systems Lab ManualArannya MonzurBelum ada peringkat
- MID CSE101 Spring 2020 AssingmentDokumen2 halamanMID CSE101 Spring 2020 AssingmentArannya MonzurBelum ada peringkat
- Xv6 Process and Cpu SchedulingDokumen31 halamanXv6 Process and Cpu SchedulingArannya MonzurBelum ada peringkat
- The Pros and Cons of Online Learning During ShutdownDokumen2 halamanThe Pros and Cons of Online Learning During ShutdownArannya MonzurBelum ada peringkat
- Online Education For CSEDokumen2 halamanOnline Education For CSEArannya MonzurBelum ada peringkat
- Biology 1st-Paper Lectures HeetDokumen77 halamanBiology 1st-Paper Lectures HeetArannya MonzurBelum ada peringkat
- Basicnt PDFDokumen69 halamanBasicnt PDFArannya MonzurBelum ada peringkat
- History of BangladeshDokumen29 halamanHistory of BangladeshArannya MonzurBelum ada peringkat
- GeometryDokumen16 halamanGeometryArannya MonzurBelum ada peringkat
- ch05 Friction Mechanics PDFDokumen84 halamanch05 Friction Mechanics PDFArannya MonzurBelum ada peringkat
- CSE BUET UG Course Calendar 2011 PDFDokumen84 halamanCSE BUET UG Course Calendar 2011 PDFArannya MonzurBelum ada peringkat
- Kojima 1993Dokumen4 halamanKojima 1993Arannya MonzurBelum ada peringkat
- 1 Aguado PDFDokumen1 halaman1 Aguado PDFArannya MonzurBelum ada peringkat
- 38th BCS Written Question PDFDokumen15 halaman38th BCS Written Question PDFArannya Monzur85% (13)
- 02 Intro Quantifiers - HandoutDokumen25 halaman02 Intro Quantifiers - HandoutArannya MonzurBelum ada peringkat
- THC63LVDM83ADokumen9 halamanTHC63LVDM83AHj SoonBelum ada peringkat
- Superposition TheoremDokumen5 halamanSuperposition TheoremnBelum ada peringkat
- B3Dokumen3 halamanB3Jericho MoralesBelum ada peringkat
- Shailendra - Yadav - R.F Design and Optimization Engineer - 5.10 - Yrs ExpDokumen7 halamanShailendra - Yadav - R.F Design and Optimization Engineer - 5.10 - Yrs ExpGaurav TiwariBelum ada peringkat
- Full Report ET2Dokumen15 halamanFull Report ET2NurulSyafiqahBelum ada peringkat
- Digital Electronics 1-Sequential Circuit CountersDokumen20 halamanDigital Electronics 1-Sequential Circuit CountersSatyam GuptaBelum ada peringkat
- Ble Cc41 A at CommandDokumen4 halamanBle Cc41 A at CommandAlzheimer RachBelum ada peringkat
- Solid-State vs. Magnetron Radar - RADA USADokumen5 halamanSolid-State vs. Magnetron Radar - RADA USAstaff officerBelum ada peringkat
- Basic MCQs of ComputerDokumen16 halamanBasic MCQs of Computerjaveed50% (2)
- EC2 NotesDokumen89 halamanEC2 NotesSalai Kishwar JahanBelum ada peringkat
- Circuito IntegradoDokumen4 halamanCircuito IntegradoDylan Gonzalez VillalobosBelum ada peringkat
- 05-JP Id Tech 5 ChallengesDokumen37 halaman05-JP Id Tech 5 ChallengesNemanja ĆosovićBelum ada peringkat
- Jec AllotmentDokumen71 halamanJec AllotmentShruti JoshiBelum ada peringkat
- Lecture 03Dokumen30 halamanLecture 03hamza abbasBelum ada peringkat
- Project Procurement Management PlanDokumen4 halamanProject Procurement Management PlanJo Fel GarciaBelum ada peringkat
- Ohms Law Formula WheelDokumen2 halamanOhms Law Formula WheelTesda SfistBelum ada peringkat
- TC BLD Owners Manual PDFDokumen4 halamanTC BLD Owners Manual PDFPabBelum ada peringkat
- Stripboard - WikipediaDokumen16 halamanStripboard - WikipediaV.k.gunaBelum ada peringkat
- Adf (Draft)Dokumen15 halamanAdf (Draft)vanmorrison69100% (1)
- Electronic NoiseDokumen100 halamanElectronic NoiseMichael DamianBelum ada peringkat
- Blktrace UsageDokumen22 halamanBlktrace Usageqexing100% (2)
- Instructions For Upgrading: REV Description Date ApprovedDokumen6 halamanInstructions For Upgrading: REV Description Date ApprovedOscar Mauricio GomezBelum ada peringkat
- Lecture05 - 8086 AssemblyDokumen43 halamanLecture05 - 8086 Assemblytesfu zewduBelum ada peringkat
- Professional Communications ReceiverDokumen8 halamanProfessional Communications ReceiverEleftheria LarissaBelum ada peringkat
- MC55 Enterprise Digital Assistant: User GuideDokumen244 halamanMC55 Enterprise Digital Assistant: User GuideVincenzo PeralcarriBelum ada peringkat
- Eet205 Analog Electronics, December 2021Dokumen3 halamanEet205 Analog Electronics, December 2021Midun RamkumarBelum ada peringkat
- Sony KV 25R2E Service ID5145 PDFDokumen7 halamanSony KV 25R2E Service ID5145 PDF081075Belum ada peringkat
- ATI FirePro V7800 DatasheetDokumen2 halamanATI FirePro V7800 Datasheetjbarboza2236Belum ada peringkat