Anda mungkin juga menyukai
- Memoria DescriptivaDokumen6 halamanMemoria DescriptivaAlexBelum ada peringkat
- Reproyectar o Convertir UTM A GTM en Kosmo - Sistemas de Información GeográficaDokumen4 halamanReproyectar o Convertir UTM A GTM en Kosmo - Sistemas de Información GeográficaGustavo MartinezBelum ada peringkat
- Banco Preguntas - Redes 1Dokumen9 halamanBanco Preguntas - Redes 1JuanBelum ada peringkat
- Control de Calidad en Los AserraderosDokumen10 halamanControl de Calidad en Los AserraderosEmanuel CardenasBelum ada peringkat
- Cotización Apto Luna Del Valle Abril 2019Dokumen22 halamanCotización Apto Luna Del Valle Abril 2019Carolina VillegasBelum ada peringkat
- Ejemplo PDCA en Una OrganizaciónDokumen5 halamanEjemplo PDCA en Una OrganizaciónAna Cecilia Huapaya ContrerasBelum ada peringkat
- Balanceo de Lineas o NivelacionDokumen14 halamanBalanceo de Lineas o NivelacionEstefani Venegas CárdenasBelum ada peringkat
- Caso de Línea de Espera Usando El ProModelDokumen4 halamanCaso de Línea de Espera Usando El ProModelAngela Viviana Linares VarelaBelum ada peringkat
- Control de Temperatura TermoparDokumen9 halamanControl de Temperatura TermoparPipe CastilloBelum ada peringkat
- MysqlDokumen21 halamanMysqlJesus Alfredo CorreaBelum ada peringkat
- Eric Hobsbawm. Un Tiempo de Rupturas. Sociedad y Cultura en El Siglo Xx. Barcelona: Crítica, 2013.Dokumen4 halamanEric Hobsbawm. Un Tiempo de Rupturas. Sociedad y Cultura en El Siglo Xx. Barcelona: Crítica, 2013.jorgeelofBelum ada peringkat
- Informe de Pasantías AntonioDokumen12 halamanInforme de Pasantías AntonioAntonio RojasBelum ada peringkat
- Ficha Técnica de Un AnimalDokumen2 halamanFicha Técnica de Un AnimalBrenda Alejandra AlfonzoBelum ada peringkat
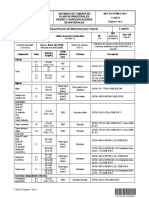
- Xat 2 Awg Cu 15kv t1 NC 100% Rev0 (Px70)Dokumen2 halamanXat 2 Awg Cu 15kv t1 NC 100% Rev0 (Px70)Charity HerreraBelum ada peringkat
- Informe Compresion Paralela en La MaderaDokumen12 halamanInforme Compresion Paralela en La MaderaLISETH PINEDABelum ada peringkat
- Introduccion Metodología ProyectualDokumen9 halamanIntroduccion Metodología ProyectualFay MichailBelum ada peringkat
- Tema 10 La Calidad en CorreosDokumen52 halamanTema 10 La Calidad en Correosgaliana.david8070Belum ada peringkat
- Planeacion OperativaDokumen7 halamanPlaneacion OperativaHugo TrejosBelum ada peringkat
- NRF 032 Pemex 2012 - T A05t3 PDFDokumen4 halamanNRF 032 Pemex 2012 - T A05t3 PDFDANIEL PEREZBelum ada peringkat
- Proyecto TV Corporativa MiunicipalDokumen4 halamanProyecto TV Corporativa MiunicipalCarlos GutierrezBelum ada peringkat
- Marco Teórico (Stefany) (Prof. Rubio)Dokumen3 halamanMarco Teórico (Stefany) (Prof. Rubio)stefanny castañedaBelum ada peringkat
- Catalogo Peak Tour 2013 - Equipaje, Mochilas, Porta Laptops, CosmetiquerasDokumen40 halamanCatalogo Peak Tour 2013 - Equipaje, Mochilas, Porta Laptops, CosmetiquerasKristophe Al TziganiBelum ada peringkat
- Radioarte PDFDokumen53 halamanRadioarte PDFMarosaMorosaBelum ada peringkat
- Trabajo de Geografía UrbanaDokumen6 halamanTrabajo de Geografía Urbanaダニー アレクサンダーBelum ada peringkat
- Paquetes y Librerias VHDLDokumen12 halamanPaquetes y Librerias VHDLpetruzkiBelum ada peringkat
- Conexion de Toma CorrienteDokumen8 halamanConexion de Toma CorrienteMoises PerelloBelum ada peringkat
- Manual Pce MCWN T Dini ArgeoDokumen38 halamanManual Pce MCWN T Dini ArgeoJAIRSAN1Belum ada peringkat
- Cambio de Modelo Energético de La Isla de LanzaroteDokumen43 halamanCambio de Modelo Energético de La Isla de LanzaroteAlda SantanaBelum ada peringkat
- Bus of 1726 (4x2) Urban - Min-7.5kDokumen1 halamanBus of 1726 (4x2) Urban - Min-7.5kHAROLD MEJIABelum ada peringkat