Anda mungkin juga menyukai
- Newnes Guide to Satellite TV: Installation, Reception and RepairDari EverandNewnes Guide to Satellite TV: Installation, Reception and RepairPenilaian: 5 dari 5 bintang5/5 (1)
- Pasang SurutDokumen32 halamanPasang SurutRomi OktavianusBelum ada peringkat
- DIS 11-12 W04 Lecture PDFDokumen67 halamanDIS 11-12 W04 Lecture PDFEvangelista Mao0% (1)
- All About GPSDokumen40 halamanAll About GPSMariamBelum ada peringkat
- Satellite Data and CommunicationDokumen33 halamanSatellite Data and CommunicationkentmultanBelum ada peringkat
- Global Positioning System: Design Considerations (Cont..)Dokumen6 halamanGlobal Positioning System: Design Considerations (Cont..)ArenPrajapatiBelum ada peringkat
- GpsDokumen22 halamanGpsSujan Singh100% (1)
- GPS Error and MBES DataDokumen12 halamanGPS Error and MBES DataFajar RBelum ada peringkat
- Gagan & IrnssDokumen2 halamanGagan & IrnssganeshBelum ada peringkat
- GPS by Akash AdwaniDokumen40 halamanGPS by Akash Adwanisolalasolala7Belum ada peringkat
- GPS: An easy to use technology for everyoneDokumen16 halamanGPS: An easy to use technology for everyoneSurya Pratap PatraBelum ada peringkat
- TrackingDokumen44 halamanTrackingZeePiDeeBelum ada peringkat
- GPS Surveying Methods and ComponentsDokumen281 halamanGPS Surveying Methods and ComponentsAa AaBelum ada peringkat
- Global Positioning SystemDokumen20 halamanGlobal Positioning SystemJyoti Prakash PrustyBelum ada peringkat
- Lecture - 3 - Working Principle of GPSDokumen67 halamanLecture - 3 - Working Principle of GPSdiptosarkarBelum ada peringkat
- Unit 4Dokumen28 halamanUnit 4raviBelum ada peringkat
- Global Trends in Space-Based SIGINT SystemsDokumen39 halamanGlobal Trends in Space-Based SIGINT SystemscartosatBelum ada peringkat
- Avleen GPS 2Dokumen27 halamanAvleen GPS 2saabi singhBelum ada peringkat
- Dgps Survey For BWDBDokumen34 halamanDgps Survey For BWDBShafiqul HasanBelum ada peringkat
- DP Induction - Global Navigation Satellite System (GNSS)Dokumen16 halamanDP Induction - Global Navigation Satellite System (GNSS)Kvartira VilyyamsaBelum ada peringkat
- Literature Survey Word Document - Copy 2Dokumen61 halamanLiterature Survey Word Document - Copy 2Uday SaiBelum ada peringkat
- Navigation Systems and Their ImplementationDokumen29 halamanNavigation Systems and Their ImplementationJustin RajaBelum ada peringkat
- 480 PresentationDokumen29 halaman480 PresentationMariamBelum ada peringkat
- Global Positioning System: Introduction ToDokumen58 halamanGlobal Positioning System: Introduction ToYasir Malik0% (1)
- Radar EngineeringDokumen13 halamanRadar Engineeringismart ShankarBelum ada peringkat
- MobileComputing4Dokumen29 halamanMobileComputing4Mai gamalBelum ada peringkat
- GPS positioning system guideDokumen23 halamanGPS positioning system guideMariecon MonteroBelum ada peringkat
- Amdl Intro To GPSDokumen29 halamanAmdl Intro To GPSgaurang1111Belum ada peringkat
- Leica - Introduction To GPSDokumen57 halamanLeica - Introduction To GPSsultanmdsazzad100% (4)
- Satellite-based positioning principles and applicationsDokumen48 halamanSatellite-based positioning principles and applicationsShriBelum ada peringkat
- Sat. Visibility and GDOP Status For The Proposed Survey Period Using Trimble Planning SoftwareDokumen18 halamanSat. Visibility and GDOP Status For The Proposed Survey Period Using Trimble Planning SoftwareswethanathBelum ada peringkat
- Chapter 1 - 2 GNSS Positioning ModesDokumen44 halamanChapter 1 - 2 GNSS Positioning ModesHawani SobryBelum ada peringkat
- Lesson 9 Gps ObservablesDokumen17 halamanLesson 9 Gps ObservablesSuresh PallemkotaBelum ada peringkat
- GPS Receiver: How it Works & ApplicationsDokumen17 halamanGPS Receiver: How it Works & Applicationsmanjeet kumarBelum ada peringkat
- 10 - GpsDokumen19 halaman10 - GpsghadasalahBelum ada peringkat
- Principle of Functioning of DGPS & ETSDokumen64 halamanPrinciple of Functioning of DGPS & ETSseshukvs100% (1)
- Seminar On GPS: By, PruthwinDokumen24 halamanSeminar On GPS: By, PruthwinPruthwinBelum ada peringkat
- Lecture 4 - Introduction To Global Positioning SystemDokumen40 halamanLecture 4 - Introduction To Global Positioning SystembuhlyunbarterBelum ada peringkat
- Geog 204 Lecture 5 GPS 2014Dokumen27 halamanGeog 204 Lecture 5 GPS 2014Joseph ZotooBelum ada peringkat
- GPS (Global Positioning System) & DGPS (Differential Global Positioning System)Dokumen103 halamanGPS (Global Positioning System) & DGPS (Differential Global Positioning System)NoCopyrightTunesBelum ada peringkat
- Satellite Navigation (GPS)Dokumen28 halamanSatellite Navigation (GPS)NAJA MOHAMEDBelum ada peringkat
- GPS Receiver Components and TypesDokumen12 halamanGPS Receiver Components and TypesSuresh PallemkotaBelum ada peringkat
- Gps Carrier MethodsDokumen63 halamanGps Carrier MethodsKap KolkataBelum ada peringkat
- Passive Radar SystemDokumen12 halamanPassive Radar Systemcharitha shetty MBelum ada peringkat
- Side-Looking Airborne RadarDokumen21 halamanSide-Looking Airborne Radarrajat pandeyBelum ada peringkat
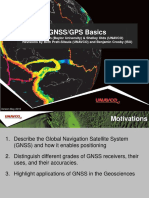
- GNSS/GPS BasicsDokumen25 halamanGNSS/GPS BasicsSharfari MatBelum ada peringkat
- International Civil Aviation Organization Spectrum Seminar Cairo, Egypt June 4-6, 2006Dokumen10 halamanInternational Civil Aviation Organization Spectrum Seminar Cairo, Egypt June 4-6, 2006FaisBelum ada peringkat
- By: Sir Umair Rasheed: The University of LahoreDokumen41 halamanBy: Sir Umair Rasheed: The University of LahoreSuman AgarwalBelum ada peringkat
- Introduction to GPS Basics in 40 CharactersDokumen41 halamanIntroduction to GPS Basics in 40 CharactersPitchaimuthu Mari PandiBelum ada peringkat
- GPS Seminar Report Provides Overview of Global Positioning SystemDokumen13 halamanGPS Seminar Report Provides Overview of Global Positioning SystemRAJESH KAMBOJBelum ada peringkat
- D06-04 KnippersPPTeachingDokumen45 halamanD06-04 KnippersPPTeachingUNNATI AGRAWALBelum ada peringkat
- 3.1-Intro +to GPSDokumen90 halaman3.1-Intro +to GPSdunglxBelum ada peringkat
- CVL111 LM2 5Dokumen20 halamanCVL111 LM2 5GoggiBelum ada peringkat
- SIG05a GNSSDokumen27 halamanSIG05a GNSSAbdul HelmiBelum ada peringkat
- Explain in Complete SentencesDokumen89 halamanExplain in Complete SentencesJayalakshmi NairBelum ada peringkat
- What Is It? - How Does It Work? - Errors and Accuracy - Ways To Maximize Accuracy - System ComponentsDokumen43 halamanWhat Is It? - How Does It Work? - Errors and Accuracy - Ways To Maximize Accuracy - System ComponentsghasemighasemiBelum ada peringkat
- Navigation SistemsDokumen16 halamanNavigation SistemsAarón RojasBelum ada peringkat
- Global Positioning System (GPS) : A Operators Guide To Use GPS Effectively As A Survey ToolDokumen25 halamanGlobal Positioning System (GPS) : A Operators Guide To Use GPS Effectively As A Survey ToolTheyen NaidooBelum ada peringkat
- Satellite Navigation SATELLITE System (GNSS)Dokumen50 halamanSatellite Navigation SATELLITE System (GNSS)Afikode ifeoluwaBelum ada peringkat
- Icg Csistokyo 2021 19Dokumen20 halamanIcg Csistokyo 2021 19paoloregarBelum ada peringkat
- SocketsDokumen28 halamanSocketsRavi SharmaBelum ada peringkat
- Bajaj Allianz Two Wheeler Insurance QuoteDokumen3 halamanBajaj Allianz Two Wheeler Insurance QuoteRavi SharmaBelum ada peringkat
- Web Solution Bcs 33Dokumen3 halamanWeb Solution Bcs 33Ravi SharmaBelum ada peringkat
- Doctor ListDokumen1 halamanDoctor ListRavi SharmaBelum ada peringkat
- Web Tech LabDokumen11 halamanWeb Tech LabRavi SharmaBelum ada peringkat
- Software Engineering Lab ManualDokumen57 halamanSoftware Engineering Lab Manualkalyanram19858017Belum ada peringkat
- Central Office, "Yogakshema", Jeevan Bima Marg, Mumbai-400021Dokumen26 halamanCentral Office, "Yogakshema", Jeevan Bima Marg, Mumbai-400021Freudestein UditBelum ada peringkat
- Fang 2018Dokumen15 halamanFang 2018Ravi SharmaBelum ada peringkat
- Final OOAD Lab Manual For 3rd Year CSE by GopiDokumen138 halamanFinal OOAD Lab Manual For 3rd Year CSE by Gopiகோபிநாத் நித்தியானந்தம்62% (21)
- Final OOAD Lab Manual For 3rd Year CSE by GopiDokumen138 halamanFinal OOAD Lab Manual For 3rd Year CSE by Gopiகோபிநாத் நித்தியானந்தம்62% (21)
- Java PracticalDokumen57 halamanJava PracticalRavi SharmaBelum ada peringkat
- Asist. Univ.: Matei StoicoviciDokumen10 halamanAsist. Univ.: Matei StoicoviciAndreea9022Belum ada peringkat
- DDDW 2 InglesDokumen5 halamanDDDW 2 InglesJose Luis Silguero SamaniegoBelum ada peringkat
- Penta XL Series UDokumen10 halamanPenta XL Series UGlennBelum ada peringkat
- QA Lead Interview QuestionsDokumen11 halamanQA Lead Interview Questionsemail2raiBelum ada peringkat
- Flowsheet Symbols and PenI DiagramsDokumen30 halamanFlowsheet Symbols and PenI DiagramsJudy Ann BoseBelum ada peringkat
- INF1511 MemoDokumen3 halamanINF1511 Memoclaudz100% (1)
- ResultsDokumen5 halamanResultsCHEATINGBASTARDBelum ada peringkat
- Absolutely Awesome Book On CSharp and .NET - TOCDokumen6 halamanAbsolutely Awesome Book On CSharp and .NET - TOCTrần Anh DũngBelum ada peringkat
- EE 311 Feedback 3Dokumen10 halamanEE 311 Feedback 3AkiHiro San CarcedoBelum ada peringkat
- Allprog II EnglishDokumen12 halamanAllprog II Englishmohcin_111_124Belum ada peringkat
- A5 byCCIEMAN2016 - NonvrfDokumen60 halamanA5 byCCIEMAN2016 - Nonvrfperico100% (1)
- Origin C Programming GuideDokumen287 halamanOrigin C Programming GuideRaviranjan Kumar SinghBelum ada peringkat
- Design-Patterns Cheat SheetDokumen36 halamanDesign-Patterns Cheat SheetcesarmarinhorjBelum ada peringkat
- How to setup Bristol Audio Synthesis with 64 StudioDokumen5 halamanHow to setup Bristol Audio Synthesis with 64 StudiobobmeanzaBelum ada peringkat
- Determinants NotesDokumen3 halamanDeterminants NotesSoham PatilBelum ada peringkat
- Planning Advertising Campaign to Maximize New CustomersDokumen4 halamanPlanning Advertising Campaign to Maximize New CustomersAdmin0% (1)
- Nexpose Enterprise Edition: Vulnerability Management To Combat Today's ThreatsDokumen2 halamanNexpose Enterprise Edition: Vulnerability Management To Combat Today's ThreatsWaqasMirzaBelum ada peringkat
- C++ Nested Loops LabDokumen8 halamanC++ Nested Loops LabFikriZainBelum ada peringkat
- CSW Research Log Book Requirements PDFDokumen8 halamanCSW Research Log Book Requirements PDFFuego McFuegoBelum ada peringkat
- Referral and Record Keeping: Beringuel, Christian JosephDokumen5 halamanReferral and Record Keeping: Beringuel, Christian JosephChristian Joseph Beringuel NietesBelum ada peringkat
- Ocularis Installation and Licensing GuideDokumen26 halamanOcularis Installation and Licensing GuideEl Librero RecolectorBelum ada peringkat
- Documentation - Diet Odin Demo ApplicationDokumen4 halamanDocumentation - Diet Odin Demo Applicationashucool23Belum ada peringkat
- W Products KeysDokumen4 halamanW Products KeysAdrian RoigBelum ada peringkat
- LED User's ManualDokumen13 halamanLED User's ManualCristiBelum ada peringkat
- A Review On Plant Recognition and Classification Techniques Using Leaf ImagesDokumen6 halamanA Review On Plant Recognition and Classification Techniques Using Leaf ImagesseventhsensegroupBelum ada peringkat
- Mining Frequent Itemsets and Association RulesDokumen59 halamanMining Frequent Itemsets and Association RulesSandeep DwivediBelum ada peringkat
- Properties of Trigonometric FunctionsDokumen9 halamanProperties of Trigonometric FunctionsMarie Carolaine FameroBelum ada peringkat
- Cleveland Clinic - BIM Specification R1.1Dokumen4 halamanCleveland Clinic - BIM Specification R1.1tantanBelum ada peringkat
- Comprehensive Project Plan - Sean SectionsDokumen2 halamanComprehensive Project Plan - Sean SectionsSean HodgsonBelum ada peringkat